一种具有下料机械手数控机床的制作方法
1.本实用新型涉及一种数控机床,特别是一种具有下料机械手数控机床。
背景技术:
2.数控机床是一种装有程序控制系统的自动化机床,用于零件的加工,而下料机械手则是一种在零件加工完成后用于移动零件的夹持装置,当零件加工完成后,便可通过下料机械手将零件夹持放置至成品区,实现自动下料的效果,而传统的下料机械手除了依靠移位装置的多个气缸实现零部件多个方向的移动,还会通过气动手指将已完成加工的零件夹紧,在零件被夹紧后便可通过多个气缸实现零件的移位,最终将零件放置于成品区,由此可知,零件移动时的稳固性主要依靠气动手指的夹爪的夹紧力,而在实际下料过程中,有些已完成加工的零件的重量依旧很重,仅仅依靠气动手指的夹爪的夹紧力,零件极易在移位过程中出现下滑的情况,严重时,甚至会出现掉落的情况,不仅会导致已加工完成的零件的损坏,且极易在掉落过程中砸到机床导致机床受损。
技术实现要素:
3.本实用新型要解决现有的技术问题是提供一种具有下料机械手数控机床,它能够在移动零件时保证零件的稳固性,有效避免零件由于自身过重导致下滑或者脱落的情况。
4.本实用新型解决上述技术问题采用的技术方案为:
5.本实用新型公开一种具有下料机械手数控机床,包括机身、设于机身上表面右侧的立架以及设于立架上端的移位装置,移位装置下端设有升降气缸安装板,升降气缸安装板下表面左侧设有第一升降气缸,第一升降气缸的活塞杆下端设有气动手指安装板,气动手指安装板下表面设有气动手指,其特征在于:所述升降气缸安装板下表面右侧设有第二升降气缸;所述第二升降气缸的活塞杆下端设有一连接板;所述连接板前端设有一前固定板,连接板后端设有与前固定板互为对称的后固定板;所述后固定板后侧侧壁设有一旋转气缸;所述前固定板与后固定板之间设有一与旋转气缸的执行元件相连接的旋转板;所述旋转板左侧侧壁设有一防碰撞缺口,气动手指位于防碰撞缺口内,气动手指外壁与防碰撞缺口内壁之间具有间隙;所述旋转板左端前后两侧侧壁皆设有一连接臂,前后两侧的连接臂下端之间设有一位于气动手指正下方的托板。
6.所述后固定板下端设有一后轴孔;所述前固定板下端设有一与后轴孔同轴的前轴孔;所述旋转气缸的执行元件位于后轴孔内并设有一固定于旋转板后侧侧壁上的后轴头;所述旋转板前侧侧壁设有一与前轴孔相匹配的前轴头。
7.所述前轴头、后轴头与旋转板一体成型。
8.所述前固定板上端、后固定板上端皆设有第一穿孔;所述连接板前端端面、后端端面皆设有与第一穿孔同轴的第一螺孔;第一螺丝穿过第一穿孔并螺接于第一螺孔内。
9.所述旋转板左端前后两侧侧壁皆设有第二螺孔;所述托板中部前后两侧侧壁皆设有第三螺孔;所述连接臂上端设有与第二螺孔相贯通的第二穿孔;第二螺丝穿过第二穿孔
并螺接于第二螺孔内,第二螺丝的头部与连接臂外壁相贴合;所述连接臂下端设有与第三螺孔相贯通的第三穿孔;第三螺丝穿过第三穿孔并螺接于第三螺孔内,第三螺丝的头部与连接臂相贴合;所述连接臂上端设有与旋转板上表面相贴合的上限位部;所述连接臂下端设有与托板下表面相贴合的下限位部。
10.所述移位装置包括设于立架上端的横向板;所述横向板上表面设有横向滑轨;所述横向板上表面右侧设有第一移动气缸;所述第一移动气缸的活塞杆左端设有与横向滑轨相匹配的纵向滑板,纵向滑板与横向板互为垂直;所述纵向滑板上表面设有与横向滑轨互为垂直的纵向滑轨;所述纵向滑板上表面后侧设有第二移动气缸;所述第二移动气缸的活塞杆前端设有一移动板;所述移动板下表面中部设有与纵向滑轨相匹配的滑块;所述移动板左端设有一位于纵向滑板左侧的左支撑板,移动板右端设有一位于纵向滑板右侧的右支撑板;所述左支撑板下端与右支撑板下端之间通过升降气缸安装板相连接。
11.本实用新型的有益效果是:
12.与现有技术相比,采用本实用新型结构的具有下料机械手数控机床可通过托板在零件被气动手指夹持时对其起到上托的效果,有效避免零件过重导致气动手指无法夹紧零件从而致使零件脱落的情况,起到防脱效果,同时有效避免零件掉落导致自身损坏或者造成机床损坏的情况,更能够避免零件掉落导致周边人员受伤的情况,有效杜绝安全隐患。
附图说明
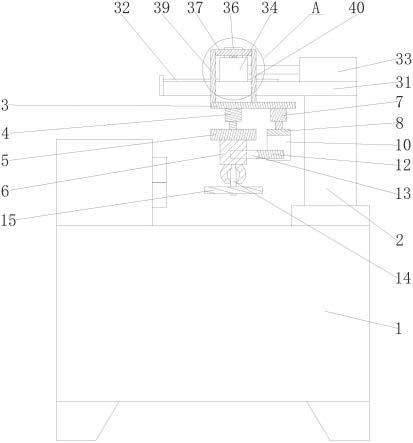
13.图1是本实用新型具有下料机械手数控机床的结构示意图;
14.图2是图1的a部的放大图;
15.图3是连接板通过前固定板、后固定板与旋转板装配时的剖面图;
16.图4是旋转板通过连接臂与托板装配时的剖面图。
具体实施方式
17.下面结合附图和具体实施方式对本发明作进一步详细的说明:
18.请参阅图1至图4,本实用新型提供一种具有下料机械手数控机床,包括机身1、设于机身1上表面右侧的立架2以及设于立架2上端的移位装置,移位装置下端设有升降气缸安装板3,升降气缸安装板3下表面左侧设有第一升降气缸4,第一升降气缸4的活塞杆下端设有气动手指安装板5,气动手指安装板5下表面设有气动手指6,所述升降气缸安装板3下表面右侧设有第二升降气缸7;所述第二升降气缸7的活塞杆下端设有一连接板8;所述连接板8前端设有一前固定板9,连接板8后端设有与前固定板9互为对称的后固定板10;所述后固定板10后侧侧壁设有一旋转气缸11;所述前固定板9与后固定板10之间设有一与旋转气缸11的执行元件相连接的旋转板12;所述旋转板12左侧侧壁设有一防碰撞缺口13,气动手指6位于防碰撞缺口13内,气动手指6外壁与防碰撞缺口13内壁之间具有间隙;所述旋转板12左端前后两侧侧壁皆设有一连接臂14,前后两侧的连接臂14下端之间设有一位于气动手指6正下方的托板15。
19.所述后固定板10下端设有一后轴孔16;所述前固定板9下端设有一与后轴孔16同轴的前轴孔17;所述旋转气缸11的执行元件1101位于后轴孔16内并设有一固定于旋转板12后侧侧壁上的后轴头18;所述旋转板12前侧侧壁设有一与前轴孔17相匹配的前轴头19。
20.所述前轴头19、后轴头18与旋转板12一体成型。
21.所述前固定板9上端、后固定板10上端皆设有第一穿孔20;所述连接板8前端端面、后端端面皆设有与第一穿孔20同轴的第一螺孔21;第一螺丝22穿过第一穿孔20并螺接于第一螺孔21内。
22.所述旋转板12左端前后两侧侧壁皆设有第二螺孔23;所述托板15中部前后两侧侧壁皆设有第三螺孔24;所述连接臂14上端设有与第二螺孔23相贯通的第二穿孔25;第二螺丝26穿过第二穿孔25并螺接于第二螺孔23内,第二螺丝26的头部与连接臂14外壁相贴合;所述连接臂14下端设有与第三螺孔24相贯通的第三穿孔27;第三螺丝28穿过第三穿孔27并螺接于第三螺孔24内,第三螺丝28的头部与连接臂14相贴合;所述连接臂14上端设有与旋转板12上表面相贴合的上限位部29;所述连接臂14下端设有与托板15下表面相贴合的下限位部30。
23.所述移位装置包括设于立架2上端的横向板31;所述横向板31上表面设有横向滑轨32;所述横向板31上表面右侧设有第一移动气缸33;所述第一移动气缸33的活塞杆左端设有与横向滑轨32相匹配的纵向滑板34,纵向滑板34与横向板31互为垂直;所述纵向滑板34上表面设有与横向滑轨32互为垂直的纵向滑轨35;所述纵向滑板34上表面后侧设有第二移动气缸36;所述第二移动气缸36的活塞杆前端设有一移动板37;所述移动板37下表面中部设有与纵向滑轨35相匹配的滑块38;所述移动板37左端设有一位于纵向滑板34左侧的左支撑板39,移动板37右端设有一位于纵向滑板34右侧的右支撑板40;所述左支撑板39下端与右支撑板40下端之间通过升降气缸安装板3相连接。
24.本实用新型的使用方法如下:
25.需要实现气动手指6左右移动时,可启动第一移动气缸33,第一移动气缸33的活塞杆则会带动纵向滑板34顺着横向滑轨32的轨迹进行左右移动,此时气动手指6随之左右移动,需要实现气动手指6前后移动时,可启动第二移动气缸36,第二移动气缸36的活塞杆则会带动移动板37顺着纵向滑轨35的轨迹进行前后移动,而左支撑板39位于纵向滑板34左侧,右支撑板40位于纵向滑板34右侧,因此左支撑板39与右支撑板40的存在不会影响移动板37的正常移动,当移动板37前后移动时,气动手指6随之前后移动,需要实现气动手指6上下移动时,则可气动第一升降气缸4,第一升降气缸4的活塞杆则会带动气动手指安装板5上下移动,此时气动手指6随之上下移动,此时便可利用移位装置将气动手指6移动至需要进行下料的零件的正上方。
26.当气动手指6移动至需进行下料的零件的正上方时,启动旋转气缸11,此时旋转气缸11的执行元件1101则会通过后轴头带动旋转板12进行旋转,使旋转板12左端向下旋转,当旋转板12旋转时,在连接臂14的作用下,托板15则会随之发生旋转,此时托板15右端向上旋转,当旋转板12向下旋转九十度后,托板15彻底从气动手指正下方离开,此时托板15则无法对气动手指6的夹持工作造成影响,便可利用第一升降气缸4带动气动手指6下移至实际所需的位置,利用自身夹爪的夹紧力将零件夹紧,当气动手指6夹紧零件后,便可通过第一升降气缸4控制气动手指6带动零件上移,此刻无需上移至实际所需的高度,待零件上移一定行程后,便可关闭第一升降气缸4,然后再次启动旋转气缸11,此时旋转气缸11的执行元件1101则会带动旋转板12向上旋转复位,当旋转板12旋转复位时,托板15随之复位,处于被气动手指6夹紧的零件的正下方,接着便可启动第二升降气缸7,此时第二升降气缸7的活塞
杆则会带动连接板8上移,当连接板8上移时,连接板8则会通过前固定板9与后固定板10带动旋转板12上移,最终实现托板15的上移,当托板15上表面与零件下表面接触时,关闭第二升降气缸7,此时托板15则会在气动手指6夹紧零件的同时托起零件,分担零件自身重力造成的压力,保证零件被移动时的稳固性,当零件被移动至下料位置后,则可再次利用第二升降气缸7与旋转气缸11使托板15从零件正下方离开,最后便可随着气动手指6的夹爪的松开,将零件稳稳的放在下料位置。
27.综上所述可知,本实用新型可通过托板15在零件被气动手指6夹持时对其起到上托的效果,有效避免零件过重导致气动手指6无法夹紧零件从而致使零件脱落的情况,起到防脱效果,同时有效避免零件掉落导致自身损坏或者造成机床损坏的情况,更能够避免零件掉落导致周边人员受伤的情况,有效杜绝安全隐患。
28.前固定板9上端、后固定板10上端皆设有第一穿孔20,连接板8前端端面、后端端面皆设有与第一穿孔20同轴的第一螺孔21,第一螺丝22穿过第一穿孔20并螺接于第一螺孔21内,这种固定方式便于前固定板9与后固定板10的拆装,从而便于旋转板12与旋转气缸11的拆装。
29.旋转板12左端前后两侧侧壁皆设有第二螺孔23,托板15中部前后两侧侧壁皆设有第三螺孔24,连接臂14上端设有与第二螺孔23相贯通的第二穿孔25,第二螺丝26穿过第二穿孔25并螺接于第二螺孔23内,第二螺丝26的头部与连接臂14外壁相贴合,连接臂14下端设有与第三螺孔24相贯通的第三穿孔27,第三螺丝28穿过第三穿孔27并螺接于第三螺孔24内,第三螺丝28的头部与连接臂14相贴合,这种固定方式便于连接臂14与旋转板12、托板15之间的拆装,从而便于部件的维修与更换。
30.连接臂14上端设有与旋转板12上表面相贴合的上限位部29,上限位部29的存在能够保证旋转板12的稳固性,若是旋转板12发生旋转,则会被上限位部29有效限制其旋转动作;连接臂14下端设有与托板15下表面相贴合的下限位部30,下限位部30的存在能够保证托板15的稳固性,若是托板15发生旋转,则会被下限位部30有效限制其旋转动作,最大程度上保证托板15托起零件时的稳定性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1