一种机器人用双轴U型焊接变位机的制作方法
一种机器人用双轴u型焊接变位机
技术领域
1.本实用新型涉及焊接辅助装置技术领域,尤其涉及一种机器人用双轴u型焊接变位机。
背景技术:
2.公开号为cn207431570u的实用新型公开了机器人用双轴u型焊接变位机,包括底座,底座的下端开设有多个插槽,底座的上端安装有头箱,底座的上端与头箱相对的一侧安装有尾箱,头箱内安装有伺服电机,伺服电机的驱动端通过平键安装有驱动轴,驱动轴远离伺服电机的一端连接有减速器,减速器的输出端通过平键安装有第一转轴,第一转轴上套设有轴承座,轴承座通过锁紧螺钉固定在头箱内,尾箱上安装有调心轴承,调心轴承内插设有第二转轴,第一转轴和第二转轴相互靠近的一端均通过花盘固定连接有夹具。该装置结构稳定,操作简单,设计科学合理,生产周期短,制作成本低,便于对支撑进行固定,值得推广。
3.但是上述技术方案存在以下缺陷:机器人的配件往往种类多样,结构复杂;该装置上设置的头箱上的夹具以及尾箱上的调心轴承相对位置固定,灵活性较低,无法针对不同结构形状的机器人及机器人的零部件进行稳定夹持,导致该装置的实用性较低,无法广泛普及。
技术实现要素:
4.本实用新型针对背景技术中存在的技术问题,提出一种机器人用双轴u型焊接变位机。
5.本实用新型的技术方案:一种机器人用双轴u型焊接变位机,包括机架、转动座、驱动电机、转动轴、u型架、夹持组件和调节组件。
6.转动座设置在机架上;由驱动电机驱动的转动轴转动设置在转动座上。u型架设置在转动轴上,u型架包括直杆和弯杆;直杆设置在弯杆的两端。夹持组件和调节组件分别设置在两组直杆上。调节组件包括调节座、调节丝杠和夹紧板;调节座设置在直杆上;调节丝杠与调节座螺纹连接;夹紧板设置在调节丝杠靠近夹持组件的一端。物料的两端分别设置在夹持组件和夹紧板上。
7.优选的,转动轴上设置有连接座;u型架设置在连接座上。
8.优选的,夹持组件包括夹持座、固定板和滑动板;夹持座设置在直杆上;固定板设置在夹持座上;滑动板滑动设置在夹持座上。
9.优选的,夹持组件还包括夹紧丝杠;夹紧丝杠转动设置在夹持座上;滑动板设置在夹紧丝杠上。
10.优选的,夹持组件还包括滑动座;滑动座滑动设置在直杆上;夹持座设置在滑动座上。
11.优选的,滑动座上设置有固定螺栓。
12.与现有技术相比,本实用新型的上述技术方案具有如下有益的技术效果:通过设置u型架,利用驱动电机带动转动轴在转动座上转动,进而带动转动轴上的u型架对物料进行焊接变位,u型架的设置提高了物料的转动稳定性;设置夹持组件和调节组件,利用调节丝杠调节夹紧板与夹持组件之间的距离,从而实现对不同尺寸规格的机器人或者机器人的零部件的夹持固定,提高本实用新型的普遍适用性,提高对物料夹持的稳定性,进而提高本实用新型的实用性。
附图说明
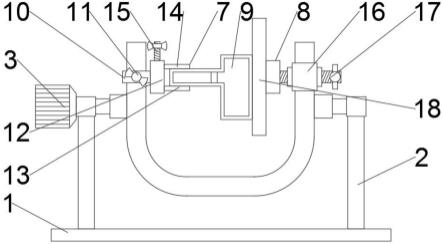
13.图1为本实用新型一种实施例的结构示意图一。
14.图2为本实用新型一种实施例的结构示意图二。
15.图3为本实用新型一种实施例的左视图。
16.附图标记:1、机架;2、转动座;3、驱动电机;4、转动轴;5、连接座;6、u型架;61、直杆;62、弯杆;7、夹持组件;8、调节组件;9、物料;10、滑动座;11、固定螺栓;12、夹持座;13、固定板;14、滑动板;15、夹紧丝杠;16、调节座;17、调节丝杠;18、夹紧板。
具体实施方式
17.实施例一
18.本实施例提出的一种机器人用双轴u型焊接变位机,包括机架1、转动座2、驱动电机3、转动轴4、u型架6、夹持组件7和调节组件8。
19.如图1-2所示,转动座2设置在机架1上;由驱动电机3驱动的转动轴4转动设置在转动座2上。u型架6设置在转动轴4上,u型架6包括直杆61和弯杆62;直杆61设置在弯杆62的两端。夹持组件7和调节组件8分别设置在两组直杆61上。调节组件8包括调节座16、调节丝杠17和夹紧板18;调节座16设置在直杆61上;调节丝杠17与调节座16螺纹连接;夹紧板18设置在调节丝杠17靠近夹持组件7的一端。物料9的两端分别设置在夹持组件7和夹紧板18上。
20.在本实施例中,通过设置u型架6,利用驱动电机3带动转动轴4在转动座2上转动,进而带动转动轴4上的u型架6对物料9进行焊接变位,u型架6的设置提高了物料的转动稳定性;设置夹持组件7和调节组件8,利用调节丝杠17调节夹紧板18与夹持组件7之间的距离,从而实现对不同尺寸规格的机器人或者机器人的零部件的夹持固定,提高本实用新型的普遍适用性,提高对物料9夹持的稳定性,进而提高本实用新型的实用性。
21.实施例二
22.本实施例提出的一种机器人用双轴u型焊接变位机,包括机架1、转动座2、驱动电机3、转动轴4、u型架6、夹持组件7和调节组件8。
23.如图1-2所示,转动座2设置在机架1上;由驱动电机3驱动的转动轴4转动设置在转动座2上。u型架6设置在转动轴4上,u型架6包括直杆61和弯杆62;直杆61设置在弯杆62的两端。夹持组件7和调节组件8分别设置在两组直杆61上。调节组件8包括调节座16、调节丝杠17和夹紧板18;调节座16设置在直杆61上;调节丝杠17与调节座16螺纹连接;夹紧板18设置在调节丝杠17靠近夹持组件7的一端。物料9的两端分别设置在夹持组件7和夹紧板18上。
24.进一步的,转动轴4上设置有连接座5;u型架6设置在连接座5上。
25.在本实施例中,通过设置u型架6,利用驱动电机3带动转动轴4在转动座2上转动,
进而带动转动轴4上的u型架6对物料9进行焊接变位,u型架6的设置提高了物料的转动稳定性;设置夹持组件7和调节组件8,利用调节丝杠17调节夹紧板18与夹持组件7之间的距离,从而实现对不同尺寸规格的机器人或者机器人的零部件的夹持固定,提高本实用新型的普遍适用性,提高对物料9夹持的稳定性,进而提高本实用新型的实用性;设置连接座5,提高转动轴4与u型架6之间的连接稳定性。
26.实施例三
27.本实施例提出的一种机器人用双轴u型焊接变位机,包括机架1、转动座2、驱动电机3、转动轴4、u型架6、夹持组件7和调节组件8。
28.如图1-2所示,转动座2设置在机架1上;由驱动电机3驱动的转动轴4转动设置在转动座2上。u型架6设置在转动轴4上,u型架6包括直杆61和弯杆62;直杆61设置在弯杆62的两端。夹持组件7和调节组件8分别设置在两组直杆61上。调节组件8包括调节座16、调节丝杠17和夹紧板18;调节座16设置在直杆61上;调节丝杠17与调节座16螺纹连接;夹紧板18设置在调节丝杠17靠近夹持组件7的一端。物料9的两端分别设置在夹持组件7和夹紧板18上。
29.进一步的,夹持组件7包括夹持座12、固定板13和滑动板14;夹持座12设置在直杆61上;固定板13设置在夹持座12上;滑动板14滑动设置在夹持座12上。
30.进一步的,夹持组件7还包括夹紧丝杠15;夹紧丝杠15转动设置在夹持座12上;滑动板14设置在夹紧丝杠15上。
31.在本实施例中,通过设置u型架6,利用驱动电机3带动转动轴4在转动座2上转动,进而带动转动轴4上的u型架6对物料9进行焊接变位,u型架6的设置提高了物料的转动稳定性;设置夹持组件7和调节组件8,利用调节丝杠17调节夹紧板18与夹持组件7之间的距离,从而实现对不同尺寸规格的机器人或者机器人的零部件的夹持固定,提高本实用新型的普遍适用性,提高对物料9夹持的稳定性,进而提高本实用新型的实用性;设置夹紧丝杠15,带动滑动板14在夹持座12上滑动,实现滑动板14配合固定板13对物料9进行夹持固定。
32.实施例四
33.本实施例提出的一种机器人用双轴u型焊接变位机,包括机架1、转动座2、驱动电机3、转动轴4、u型架6、夹持组件7和调节组件8。
34.如图1-3所示,转动座2设置在机架1上;由驱动电机3驱动的转动轴4转动设置在转动座2上。u型架6设置在转动轴4上,u型架6包括直杆61和弯杆62;直杆61设置在弯杆62的两端。夹持组件7和调节组件8分别设置在两组直杆61上。调节组件8包括调节座16、调节丝杠17和夹紧板18;调节座16设置在直杆61上;调节丝杠17与调节座16螺纹连接;夹紧板18设置在调节丝杠17靠近夹持组件7的一端。物料9的两端分别设置在夹持组件7和夹紧板18上。
35.进一步的,夹持组件7包括夹持座12、固定板13和滑动板14;夹持座12设置在直杆61上;固定板13设置在夹持座12上;滑动板14滑动设置在夹持座12上。
36.进一步的,夹持组件7还包括滑动座10;滑动座10滑动设置在直杆61上;夹持座12设置在滑动座10上。
37.进一步的,滑动座10上设置有固定螺栓11。
38.在本实施例中,通过设置u型架6,利用驱动电机3带动转动轴4在转动座2上转动,进而带动转动轴4上的u型架6对物料9进行焊接变位,u型架6的设置提高了物料的转动稳定性;设置夹持组件7和调节组件8,利用调节丝杠17调节夹紧板18与夹持组件7之间的距离,
从而实现对不同尺寸规格的机器人或者机器人的零部件的夹持固定,提高本实用新型的普遍适用性,提高对物料9夹持的稳定性,进而提高本实用新型的实用性;设置滑动座10,便于在直杆61上调节夹持座12的位置,从而便于对不同尺寸规格的物料9进行具有针对性的夹持;设置固定螺栓11,便于将滑动座10固定设置在直杆61上。
39.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1