一种基于六自由度机器人的自动化打磨末端执行器
1.本发明涉及工业机械领域,特别是涉及一种基于六自由度机器人的自动化打磨末端执行器。。
背景技术:
2.工业中很多件工件需要进行打磨抛光,使用人工打磨不仅效率低下同时劳动量和劳动强度较高,使用基于六自由度机器人的自动化打磨装置是非常必要的。
技术实现要素:
3.由于智能工厂的出现,在智能生产线的加工制造过程中,可以使用带有视觉识别相机的基于六自由度机器人的自动化打磨装置对被打磨件进行自动夹取以及360度全方位打磨,通过视觉识别被打磨面,确定加工精度及加工余量,高效完成自动化打磨工作。
4.本实用新型针对现有工件在打磨抛光过程中的自动化问题,提供一种基于六自由度机器人的自动化打磨末端执行器。
5.为实现上述目的,本实用新型采用以下技术方案:
6.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:包括自动化打磨机机架,打磨夹具驱动组件,相机安装板,高精度视觉识别相机,阻尘杯,集尘杯,通风软管,涡轮增压器涡轮增压电机,涡轮增压电机安装板,机器人末端连接基板,打磨头电机,打磨头电机安装板,打磨头组件;所述自动化打磨机机架与机器人末端连接基板螺栓连接,所述机器人末端连接基板与六自由度机器人末端执行器螺栓连接;所述打磨夹具驱动组件通过螺栓连接到自动化打磨机机架;所述相机安装板通过螺栓连接到自动化打磨机机架;所述高精度视觉识别相机通过螺栓连接到相机安装板上;所述阻尘杯通过螺栓连接到打磨头组件上;所述集尘杯通过螺栓连接到阻尘杯上方;所述通风软管连接集尘杯与涡轮增压组件;所述涡轮增压组件包括涡轮增压器涡轮增压电机,涡轮增压电机安装板;所述打磨头电机通过螺栓安装到打磨头电机安装板上。
7.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:所述打磨夹具驱动组件包括:夹具,夹具安装板,夹手驱动电机,从动齿轮机构,主动齿轮机构,夹具驱动安装板,夹具滑动导轨,夹具驱动滑块,气缸安装座i,锁紧螺母,夹具驱动气缸,气缸安装座ii。
8.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:所述夹手驱动电机通过驱动主动齿轮机构带动从动齿轮机构运转;所述夹具通过螺栓与从动齿轮机构连接;所述从动齿轮机构、主动齿轮机构通过螺栓安装到夹具安装板上;所述夹具安装板通过螺栓与夹具驱动滑块连接;所述夹具驱动滑块由夹具驱动气缸驱动,在夹具滑动导轨上运动;所述夹具驱动气缸通过气缸安装座i、气缸安装座ii安装到夹具驱动安装板上。
9.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:采用涡轮增压电机带动涡轮增压器进行工作,通过通风软管将打磨过程中的尘土由阻尘杯进入集尘杯
中;所述集尘杯可进行定期更换。
10.所述夹具滑动导轨两端具有限位板,从而限制两个夹具驱动滑块在两根夹具滑动导轨上的运动位置。
11.作为一种优选,所述电机都采用伺服电机进行控制。
12.与现有技术相比,本实用新型具有以下优点。
13.1、具有视觉识别装置,能够对不同被打磨件进行识别并抓取,进一步判断被打磨件的加工精度及加工余量。
14.2、该末端执行器能够保证在打磨工件的过程中实现360度全方位打磨。
附图说明
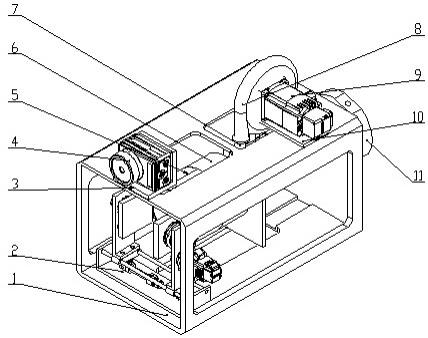
15.图1为基于六自由度机器人的自动化打磨末端执行器状态示意图
16.图2为基于六自由度机器人的自动化打磨末端执行器主视图
17.图3为打磨夹具驱动组件示意图
18.图中:1为自动化打磨机机架,2为打磨夹具驱动组件,3为相机安装板,4为高精度视觉识别相机,5为阻尘杯,6为集尘杯,7为通风软管,8为涡轮增压器,9为涡轮增压电机,10为涡轮增压电机安装板,11为机器人末端连接基板,12为打磨头电机,13为打磨头电机安装板,14为打磨头组件,201为夹具,202为夹具安装板,203为夹手驱动电机,204为从动齿轮机构,205为主动齿轮机构,206为夹具驱动安装板,207为夹具滑动导轨,208为夹具驱动滑块,209为气缸安装座i,210为锁紧螺母,211为夹具驱动气缸,212为气缸安装座ii
具体实施方式
19.下面结合附图和具体实施例对本实用新型作进一步说明,但不作为对本实用新型的限定。
20.如图1、2、3所示:一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:包括自动化打磨机机架,打磨夹具驱动组件,相机安装板,高精度视觉识别相机,阻尘杯,集尘杯,通风软管,涡轮增压器涡轮增压电机,涡轮增压电机安装板,机器人末端连接基板,打磨头电机,打磨头电机安装板,打磨头组件;所述自动化打磨机机架与机器人末端连接基板螺栓连接,所述机器人末端连接基板与六自由度机器人末端执行器螺栓连接;所述打磨夹具驱动组件通过螺栓连接到自动化打磨机机架;所述相机安装板通过螺栓连接到自动化打磨机机架;所述高精度视觉识别相机通过螺栓连接到相机安装板上;所述阻尘杯通过螺栓连接到打磨头组件上;所述集尘杯通过螺栓连接到阻尘杯上方;所述通风软管连接集尘杯与涡轮增压组件;所述涡轮增压组件包括涡轮增压器涡轮增压电机,涡轮增压电机安装板;所述打磨头电机通过螺栓安装到打磨头电机安装板上。
21.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:所述打磨夹具驱动组件包括:夹具,夹具安装板,夹手驱动电机,从动齿轮机构,主动齿轮机构,夹具驱动安装板,夹具滑动导轨,夹具驱动滑块,气缸安装座i,锁紧螺母,夹具驱动气缸,气缸安装座ii。
22.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:所述夹手驱动电机通过驱动主动齿轮机构带动从动齿轮机构运转;所述夹具通过螺栓与从动齿轮机构连
接;所述从动齿轮机构、主动齿轮机构通过螺栓安装到夹具安装板上;所述夹具安装板通过螺栓与夹具驱动滑块连接;所述夹具驱动滑块由夹具驱动气缸驱动,在夹具滑动导轨上运动;所述夹具驱动气缸通过气缸安装座i、气缸安装座ii安装到夹具驱动安装板上。
23.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:由夹手驱动电机驱动的主动齿轮机构可以带动被打磨件进行360度全方位打磨,提高打磨效率。
24.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:采用涡轮增压电机带动涡轮增压器进行工作,通过通风软管将打磨过程中的尘土由阻尘杯进入集尘杯中;所述集尘杯可进行定期更换。
25.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:所述高精度视觉识别相机可以对不同被打磨件的位置进行识别,从而实现有效抓取,对不同被打磨面进行识别,从而选择加工精度及加工余量。
技术特征:
1.一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:包括自动化打磨机机架(1),打磨夹具驱动组件(2),相机安装板(3),高精度视觉识别相机(4),阻尘杯(5),集尘杯(6),通风软管(7),涡轮增压器(8)涡轮增压电机(9),涡轮增压电机安装板(10),机器人末端连接基板(11),打磨头电机(12),打磨头电机安装板(13),打磨头组件(14);所述自动化打磨机机架(1)与机器人末端连接基板(11)螺栓连接,所述机器人末端连接基板(11)与六自由度机器人末端执行器螺栓连接;所述打磨夹具驱动组件(2)通过螺栓连接到自动化打磨机机架(1);所述相机安装板(3)通过螺栓连接到自动化打磨机机架(1);所述高精度视觉识别相机(4)通过螺栓连接到相机安装板(3)上;所述阻尘杯(5)通过螺栓连接到打磨头组件(14)上;所述集尘杯(6)通过螺栓连接到阻尘杯(5)上方;所述通风软管(7)连接集尘杯(6)与涡轮增压组件;所述涡轮增压组件包括涡轮增压器(8)涡轮增压电机(9),涡轮增压电机安装板(10);所述打磨头电机(12)通过螺栓安装到打磨头电机安装板(13)上。2.根据权利要求1所述的一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:所述打磨夹具驱动组件(2)包括:夹具(201),夹具安装板(202),夹手驱动电机(203),从动齿轮机构(204),主动齿轮机构(205),夹具驱动安装板(206),夹具滑动导轨(207),夹具驱动滑块(208),气缸安装座i(209),锁紧螺母(210),夹具驱动气缸(211),气缸安装座ii(212)。3.根据权利要求2所述的一种基于六自由度机器人的自动化打磨末端执行器,其特征在于:所述夹手驱动电机(203)通过驱动主动齿轮机构(205)带动从动齿轮机构(204)运转;所述夹具(201)通过螺栓与从动齿轮机构(204)连接;所述从动齿轮机构(204)、主动齿轮机构(205)通过螺栓安装到夹具安装板(202)上;所述夹具安装板(202)通过螺栓与夹具驱动滑块(208)连接;所述夹具驱动滑块(208)由夹具驱动气缸(211)驱动,在夹具滑动导轨(207)上运动;所述夹具驱动气缸(211)通过气缸安装座i(209)、气缸安装座ii(212)安装到夹具驱动安装板(206)上。
技术总结
本实用新型涉及工业机械领域,一种基于六自由度机器人的自动化打磨末端执行器,包括自动化打磨机机架,打磨夹具驱动组件,视觉识别装置,阻尘杯,集尘杯,涡轮增压组件,机器人末端连接基板,打磨装置。所述自动化打磨机机架与机器人末端连接基板螺栓连接,所述机器人末端连接基板与六自由度机器人末端执行器螺栓连接。所述视觉识别装置包括高精度视觉识别相机和相机安装板。所述阻尘杯通过螺栓连接到打磨头组件上。所述集尘杯通过螺栓连接到阻尘杯上方。所述通风软管连接集尘杯与涡轮增压组件。所述涡轮增压组件包括涡轮增压器,涡轮增压电机,涡轮增压电机安装板。所述打磨装置包括打磨头电机,打磨头电机安装板,打磨头组件。打磨头组件。打磨头组件。
技术研发人员:杨原青
受保护的技术使用者:山西农业大学
技术研发日:2021.04.02
技术公布日:2021/11/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1