一种双磨头的机器人的制作方法
1.本实用新型涉及机器人技术领域,具体的是涉及自动执行工作的机器人。
背景技术:
2.机器人是日益普及的一种设备,它越来越广泛的用在工业生产和日常生活中;打磨机器人是其中的一种,用于打磨,它包括底座和机器人臂,机器人臂安装在底座上,机器人臂包括多个操作轴,各个操作轴之间是轴关节,轴关节处安装有电机,磨头安装在最末端的操作轴的自由端;现有技术中,最末端的操作轴只安装一个磨头,只能满足一种需要,遇到另外情况还需要更换磨头,具有使用不便的缺点。
技术实现要素:
3.本实用新型的目的就是针对上述缺点,提供一种打磨东西更加方便的打磨机器人——一种双磨头的机器人。
4.本实用新型的技术方案这样实现:一种双磨头的机器人,包括机器人底座和机器人臂,所述的机器人臂安装在机器人底座上,所述的机器人臂包括多节操作轴,各个操作轴之间是轴关节,所述的轴关节处安装有电机,其特征是:在最末端的操作轴的自由端安装有两个工作头,两个工作头的方向相反。
5.进一步地讲,在所述最末端的操作轴的自由端具有壳体,所述壳体的上面安装在自由端处,所述壳体和自由端转动连接,所述壳体内具有两个主轴,其中一个主轴从壳体的前面伸出,这是前主轴,所述前主轴处安装前工作头,另一个主轴从壳体的后面伸出,这是后主轴,所述后主轴安装后工作头。
6.进一步地讲,所述的前工作头是磨盘,所述的后工作头是磨头。
7.进一步地讲,所述各节操作轴的运作、所述电机壳的旋转和双磨头转动状态都由编程控制。
8.进一步地讲,在所述机器人的前面具有打磨工作台,所述打磨工作台上具有挡板,所述挡板将所述打磨工作台分为两部分,分别是前打磨工作台和后打磨工作台,所述打磨工作台能够绕着自身轴线旋转。
9.进一步地讲,所述打磨工作台的旋转由编程控制。
10.本实用新型的有益效果是:这样的双磨头的机器人由于安装了两个工作头,因此能满足更多的需要;由于既安装了磨头又安装了磨盘,因此能够满足更多打磨的需求。
附图说明
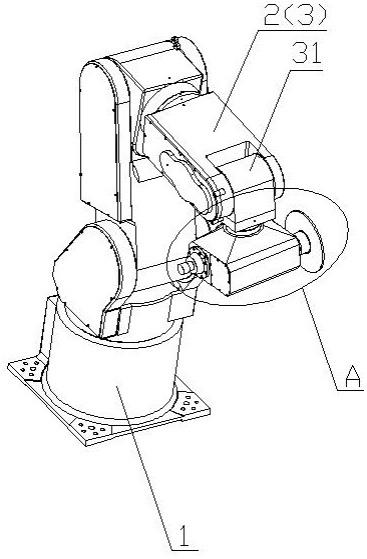
11.图1是本实用新型的结构示意图。
12.图2是图1的a处放大示意图。
13.图3是本实用新型另一角度示意图;(为方便显示,省去电机壳)。
14.图4是图3的b处放大示意图。
15.图5是本实用新型第三角度示意图。
16.其中:1、机器人底座
ꢀꢀ
2、机器人臂
ꢀꢀ
3、操作轴
ꢀꢀ
4、轴关节
ꢀꢀ
5、电机
ꢀꢀ
31、最末端的操作轴
ꢀꢀ
6、壳体
ꢀꢀ
8、其中一个主轴
ꢀꢀ
9、前主轴
ꢀꢀ
10、前工作头
ꢀꢀ
11、另一个主轴
ꢀꢀ
12、后工作头
ꢀꢀ
13、磨盘
ꢀꢀ
14、磨头
ꢀꢀ
15、打磨工作台
ꢀꢀ
16、挡板。
具体实施方式
17.下面结合附图对本实用新型作进一步的说明。
18.如图1、2、3、4、5所示,一种双磨头的机器人,包括机器人底座1和机器人臂2,机器人臂安装在机器人底座上,机器人臂包括多节操作轴3,各个操作轴之间是轴关节4,轴关节处安装有电机5,其特征是:在最末端的操作轴31的自由端安装有两个工作头,两个工作头的方向相反。
19.使用方法:本实用新型的使用方法和现有技术一致,由于最末端的操作轴的自由端安装有两个工作头,可以选用任意一个工作头工作,适合不同的需要。
20.进一步地讲,在最末端的操作轴的自由端具有壳体6,壳体的上面安装在自由端处,所述壳体和自由端转动连接,旋转方向如图中e所示,壳体内具有两个主轴,其中一个主轴8从壳体的前面伸出,这是前主轴9,前主轴处安装前工作头10,另一个主轴11从壳体的后面伸出,这是后主轴,后主轴安装后工作头12。
21.这样设置,提供了一种具体实施方式,当需要前工作头工作时,就将前工作头在前面进行打磨,当需要后工作头工作时,就将后工作头转到前面并固定,然后进行打磨,旋转方向如图中e所示。
22.进一步地讲,前工作头是磨盘13,后工作头是磨头14。
23.这样设置,磨盘用来进行整体打磨。磨头用来对细节处进行打磨。
24.进一步地讲,各节操作轴的运作、壳体的旋转和双磨头转动状态都由编程控制。
25.这样更具有自动化。
26.进一步地讲,在机器人的前面具有打磨工作台15,打磨工作台上具有挡板16,挡板将打磨工作台分为两部分,分别是前打磨工作台和后打磨工作台,打磨工作台能够绕着自身轴线旋转,旋转方向如图中f。
27.这样设置,形成了两个工作工位,分别是前打磨工作台和后打磨工作台,工作时,可以将其中一个打磨工作台放上工件然后转到前面,对这个工件进行打磨,打磨同时在另一个打磨工作台放上工件,这样轮流打磨,提升工作效率。
28.进一步地讲,打磨工作台的旋转由编程控制。
29.以上所述仅为本实用新型的具体实施例,但本实用新型的结构特征并不限于此,任何本领域的技术人员在本实用新型的领域内,所作的变化或修饰皆涵盖在本实用新型的专利范围内。
技术特征:
1.一种双磨头的机器人,包括机器人底座和机器人臂,所述的机器人臂安装在机器人底座上,所述的机器人臂包括多节操作轴,各个操作轴之间是轴关节,所述的轴关节处安装有电机,其特征是:在最末端的操作轴的自由端安装有两个工作头,两个工作头的方向相反。2.根据权利要求1所述的双磨头的机器人,其特征是:在所述最末端的操作轴的自由端具有壳体,所述壳体的上面安装在自由端处,所述壳体和自由端转动连接,所述壳体内具有两个主轴,其中一个主轴从壳体的前面伸出,这是前主轴,所述前主轴处安装前工作头,另一个主轴从壳体的后面伸出,这是后主轴,所述后主轴安装后工作头。3.根据权利要求2所述的双磨头的机器人,其特征是:所述的前工作头是磨盘,所述的后工作头是磨头。
技术总结
本实用新型涉及机器人技术领域,名称是一种双磨头的机器人,包括机器人底座和机器人臂,机器人臂安装在机器人底座上,机器人臂包括多节操作轴,各个操作轴之间是轴关节,轴关节处安装有电机,在最末端的操作轴的自由端安装有两个工作头,两个工作头的方向相反。这样的双磨头的机器人具有功能丰富的优点。的双磨头的机器人具有功能丰富的优点。的双磨头的机器人具有功能丰富的优点。
技术研发人员:闫玉龙 段英杰 冯贵新 胡永超 胡艳蕾 赵云龙 李涛 韩文豪 蒋锴静 袁昌玉
受保护的技术使用者:河南睿辰机器人智能科技有限公司
技术研发日:2021.10.21
技术公布日:2022/4/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1