一种酿酒用粮食蒸煮装置的制作方法
1.本实用新型涉及酿酒设备技术领域,特别是一种酿酒用粮食蒸煮装置。
背景技术:
2.白酒酿造属于传统产业,而且一直以来均主要采用人工传统生产方式生产,近年来,中国白酒的酿造技术正处在前所未有的发展阶段,同时伴随着劳动力成本的不断攀升,以及土地资源的日益紧张、能源消耗的形势愈来愈严重、生产环境更加严格等现状,传统的作坊式生产方式已远远不能适应这一要求,因此,有必要对传统的酿造工艺、生产方式以及生产设施进行改进。
3.目前,酿酒工艺中,关于粮食蒸煮的传统方法是:粮食从泡粮桶放下后工人需要人工冲洗泡粮桶壁残留的粮食,再手动盖锅盖,中控系统开始自动蒸粮,具体流程为一次排水、一次排汽、一次卸压,在确认锅内压力卸完后通过管道加闷粮水(流量计计量加水量),加水结束后转锅2圈,工人打开锅盖,检查锅内是否有粮食露出水面,并检查粮食吸水情况,待粮食吸水情况达到要求后人工打开蒸锅底阀,闷粮水通过底阀经由接粮斗板链排到地面上,排水结束后粮食在蒸锅内冷吊1
‑
12小时。冷吊结束后人工关闭蒸锅底阀,盖锅盖,中控系统完成二次保压、卸压。
4.上述粮食蒸煮的传统方法存在以下缺点:
5.1、人工开盖和盖盖操作缓慢,影响工序之间的切换;
6.2、蒸锅内蒸汽、水量分配不均匀、准确;
7.3、蒸锅内料层较厚,上下层粮食受压、受水时间不一致,粮食蒸煮一致性较差;
8.4、排气泄压阀人工在做,有安全隐患;
9.5、闷粮水添加需要快速,不能通过管道加闷粮水;
10.6、直排水还是人工操作存在安全隐患,以及直排到底部板链污染环境;
11.7、直排水结束的节点判断仍然是通过工人目视化确认;
12.8、锅壁残留只能人工冲水清洗,操作繁琐。
技术实现要素:
13.为解决现有技术中存在的问题,本实用新型提供了一种酿酒用粮食蒸煮装置。
14.本实用新型采用的技术方案是:
15.一种酿酒用粮食蒸煮装置,包括蒸锅,所述蒸锅的顶部入料口设有人孔盖,所述人孔盖连接有可驱动人孔盖开闭的气缸,所述蒸锅的底部排水口设有气动蝶阀;所述蒸锅的外侧壁中部分别连接有主动转轴和被动转轴,所述主动转轴和被动转轴以蒸锅的轴心和中心对称设置,所述主动转轴连接有驱动蒸锅绕主动转轴的轴心转动的第一驱动装置,所述主动转轴和被动转轴的轴心处分别开设有连通蒸锅内外两侧的进口,其中一个进口为水、汽混合进口,另外一个进口为清洗进口;所述蒸锅的内侧底部设有隔板,所述隔板与蒸锅的底部之间为容纳高温热水的腔室,所述腔室内设有用于输送水、汽的盘管,所述盘管的进口
与水、汽混合进口连接,所述蒸锅的中部设有清洗球,所述清洗球的进口与清洗进口连接;所述蒸锅的顶部设有排气泄压口。
16.优选的,所述蒸锅的排水口下方设有接水斗,所述接水斗连接有可驱动接水斗绕一竖直轴线转动的第二驱动装置,且该竖直轴线与蒸锅的排水口的轴线不共线。
17.优选的,所述接水斗的下方设有传送链板。
18.优选的,所述腔室的侧壁上设有温度传感器。
19.优选的,所述腔室内设有第一液位传感器,所述蒸锅的内侧上部设有第二液位传感器。
20.本实用新型的有益效果是:
附图说明
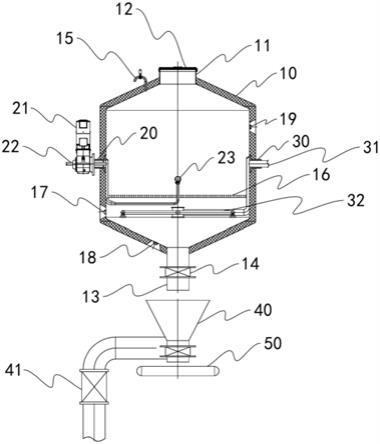
21.图1为本实用新型实施例的结构示意图;
22.附图标记:10
‑
蒸锅,11
‑
入料口,12
‑
人孔盖,13
‑
排水口,14
‑
气动蝶阀,15
‑
排气泄压口,16
‑
隔板,17
‑
温度传感器,18
‑
第一液位传感器,19
‑
第二液位传感器,20
‑
主动转轴,21
‑
第一驱动装置,22
‑
清洗进口,23
‑
清洗球,30
‑
被动转轴,31
‑
水、汽混合进口,32
‑
盘管,40
‑
接水斗,41
‑
第二驱动装置,50
‑
传送链板。
具体实施方式
23.下面结合附图对本实用新型的实施例进行详细说明。
24.实施例
25.如图1所示,一种酿酒用粮食蒸煮装置,包括蒸锅10,所述蒸锅10的顶部入料口11设有人孔盖12,所述人孔盖12连接有可驱动人孔盖12开闭的气缸,所述蒸锅10的底部排水口13设有气动蝶阀14;所述蒸锅10的外侧壁中部分别连接有主动转轴20和被动转轴30,所述主动转轴20和被动转轴30以蒸锅10 的轴心和中心对称设置,所述主动转轴20连接有驱动蒸锅10绕主动转轴20的轴心转动的第一驱动装置21,所述主动转轴20和被动转轴30的轴心处分别开设有连通蒸锅10内外两侧的进口,其中一个进口为水、汽混合进口31,另外一个进口为清洗进口22;所述蒸锅10的内侧底部设有隔板16,所述隔板16与蒸锅10的底部之间为容纳高温热水的腔室,所述腔室内设有用于输送水、汽的盘管32,所述盘管32的进口与水、汽混合进口31连接,所述蒸锅10的中部设有清洗球23,所述清洗球23的进口与清洗进口22连接;所述蒸锅10的顶部设有排气泄压口15。
26.本蒸煮装置的工作过程如下:先通过气缸打开人孔盖12和气动蝶阀14,将高粱和水从泡粮桶经入料口11倒入蒸锅10中,高粱落于隔板16上,而水则通过隔板16上的滤孔流下经排水口13排空,然后关闭气动蝶阀14完成加料。再通过气缸盖上人孔盖12,由水、汽混合进口31泵入高温热水,可在盘管32上均匀连接多个喷头,高温热水经盘管32上的喷头输送到腔室内,完成加水,注意加高温热水后水面不得超过隔板16。加水后再由水、汽混合进口31接通蒸汽,开始蒸粮;同样的,蒸汽也经盘管32上的喷头输送进腔室内。待蒸粮时间结束,打开排气泄压口15排空蒸锅10内的蒸汽,并再次打开气动蝶阀14排空热水,在蒸锅10内的蒸汽排空后和热水排空后,相应的关闭排气泄压口15和气动蝶阍。再通过气缸打开人孔盖12,通过泡粮桶经入料口11向蒸锅10内倒入闷粮水,待粮食完全浸泡在闷粮水中后为止,
然后通过气缸关闭人孔盖12完成闷粮水加注。再由第一驱动装置21通过主动转轴20带动蒸锅10往复摇摆2 次,待闷粮结束后,打开气动蝶阀14,通过排水口13排空闷粮水。再次通过水、汽混合进口31依次加高温热水和接通蒸汽进行二次复蒸。待二次复蒸完成后,再次打开排气泄压口15排空蒸锅10内的蒸汽,以及打开气动蝶阀14排空热水。待蒸汽和热水排空后,启动第一驱动装置21通过主动转轴20带动蒸锅10翻转,将蒸煮后的粮食从入料口11倒出。待粮食倒完后,通过清洗管路接通清水,通过清洗球23喷洒清水对蒸锅10内部进行清洗,待清洗完成后且清洗后的水和残渣通过入料口11排尽后,再启动第一驱动装置21通过主动转轴20带动蒸锅 10复位,即完成一次粮食蒸煮。
27.其中,在图1中,清洗进口22设于主动转轴20上,而水、汽混合进口31 设于被动转轴30上,当然,清洗进口22和水、汽混合进口31的位置可以互换。主动转轴20和被动转轴30可通过支架进行支撑,且主动转轴20与支架之间可旋转的连接,该旋转连接可由轴承实现。而被动转轴30与蒸锅10或支架其一可旋转的连接,或与两者均可旋转的连接,同样可通过轴承实现旋转连接。需要注意的事,主动转轴20和被动转轴30与蒸锅10之间要保证良好的密封性。清洗进口22可只在需要接入清水时再连接进水管道,也可通过旋转密封的方式与进水管道常连,只要保证良好的旋转密封即可。同理,水、汽混合进口31也可只在需要时连接进水管道和蒸汽管道,也可通过旋转密封的方式连接一段水、汽管道,只要保证良好的旋转密封即可,然后由该水、汽管道经三通分别连接进水管道和蒸汽管道。主动转轴20的第一驱动装置21可选择旋转电机。盘管32的进口可沿蒸锅10的内侧壁向上延伸穿过隔板16后连接水、汽混合进口31。清洗球23连接的清洗管道可向下延伸穿过隔板16后弯向蒸锅10的内侧壁,然后再沿蒸锅10的内侧壁向上延伸穿过隔板16后连接清洗进口22,使管道的大部分位于腔室内,防止对粮食蒸煮造成干扰,同时也是避免粮食对管路造成干扰。
28.在其中一个实施例中,所述蒸锅10的排水口13下方设有接水斗40,所述接水斗40连接有可驱动接水斗40绕一竖直轴线转动的第二驱动装置41,且该竖直轴线与蒸锅10的排水口13的轴线不共线。
29.接水斗40可接取排水口13排出的水,防止水四处溅洒开污染工作环境。接水斗40通过第二驱动装置41带动绕一竖直轴线转动,在需要接水的时候,第二驱动装置41将其旋转至排水口13下方接水,而在蒸锅10翻转后倒出蒸煮好的粮食前,第二驱动装置41将接水斗40旋转开,以防止粮食倒入接水斗40 中。第二驱动装置41可由连接于接水斗40一侧的倒“l”型支撑件以及与支撑件底端连接的气动旋转接头组成。
30.在其中一个实施例中,所述接水斗40的下方设有传送链板50。
31.在蒸锅10倒出蒸煮好的粮食时,粮食直接倒在传送链板50上,由传送链板50同步将粮食输送走。
32.在其中一个实施例中,所述腔室的侧壁上设有温度传感器17。
33.温度传感器17可用于检测粮食蒸煮时蒸锅10内的温度,便于操作人员掌握蒸锅10内的蒸煮情况,温度传感器17可使用温度表,其传感元件设于蒸锅 10内,显示部分设于蒸锅10外便于操作人员观察,可根据温度传感器17检测的蒸锅10内温度调节蒸煮时的蒸汽输入量,还可将温度传感器17连接控制器,由控制器控制蒸汽源的伺服系统根据蒸锅10内温度调节蒸汽量。
34.在其中一个实施例中,所述腔室内设有第一液位传感器18,所述蒸锅10的内侧上
部设有第二液位传感器19。
35.通过第一液位传感器18和第二液位传感器19可分别控制蒸粮时的进水量和闷粮时的进水量,其中,第一液位传感器18可对应于蒸粮时的最佳水位线设置,而第二液位传感器19可对应闷粮时的最佳水位线设置。第一液位传感器18 和第二液位传感器19的传感元件设于蒸锅10内,显示部分设于蒸锅10外,以便于操作人员观察。还可将第一液位传感器18和第二液位传感器19连接控制器,由控制器控制热水源的伺服系统根据第一液位传感器18和第二液位传感器 19的检测结果控制进水。
36.以上所述实施例仅表达了本实用新型的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1