一种细胞工厂制备生物制品的管阀框架及显微观察系统的制作方法
1.本发明涉及生物制品制备技术领域,特别涉及一种细胞工厂制备生物制品的管阀框架及显微观察系统。
背景技术:
2.细胞工厂作为一种细胞培养装置,可以在有限的空间内增大培养面积,提高培养效率,目前在疫苗、单克隆抗体和细胞提取物等生命科学领域大量使用。细胞工厂主要应用于贴壁细胞培养,也可以用于悬浮细胞培养。细胞工厂具有多种层数及规格,满足实验室及批量化生产需求,使得从实验室规模进行放大时不会改变细胞生长的动力学条件,简单易行。
3.目前,使用细胞工厂进行生物制品制备,普遍采用人工方式或传统细胞工厂翻转设备,操作人员需要依靠目视来判断进、排液量,并手动插管、拔管及控制蠕动泵管阀启停,操作过程中存在管路断开、液体定量不准、操作效率低、混液中和、管路存液等众多不便,且传统细胞工厂观察系统也需要人工逐一搬抬细胞工厂到显微观察平台,存在劳动强度大、液体扰动、观察效率低等缺陷。随着无菌六轴机器人在细胞培养领域的大量应用,急需一种自动化程度高的操作方案来实现细胞工厂定量进排液及高效的显微观察,从而降低人工参与度,降低风险、保证操作的一致性。
技术实现要素:
4.本发明提供一种细胞工厂制备生物制品的管阀框架及显微观察系统,用以解决细胞工厂进排液人工操作时劳动强度大、液体扰动大的问题。
5.为此,采用的技术方案是,本发明的一种细胞工厂制备生物制品的管阀框架及显微观察系统,包括:管阀压板组件、不锈钢框架和转运车,所述管阀压板组件设置在所述不锈钢框架上且与细胞工厂管路连通,管阀压板组件用于控制细胞工厂的进排液,所述不锈钢框架设置在所述转运车上。
6.优选的,所述管阀压板组件包括压板箱,所述压板箱与所述不锈钢框架卡接,所述压板箱上固定设置有六个蠕动泵管阀,其中四个所述蠕动泵管阀分别用于控制细胞工厂管路的启闭,另外两个所述蠕动泵管阀分别用于控制主进液管路和主排液管路的启闭。
7.优选的,所述转运车包括:
8.车体,所述车体水平设置,且车体下端面四角处固定设置有万向轮,所述不锈钢框架放置在所述车体上;
9.把手,所述把手固定设置在所述车体上用于推动所述车体。
10.优选的,所述车体上设置有推车,所述推车水平设置在所述车体上,所述推车下端设置有陶瓷滑辊。
11.优选的,所述推车与所述陶瓷滑辊之间还设置有伸缩组件,所述伸缩组件包括:
12.中心套筒,所述中心套筒竖直设置在所述推车下端面;
13.伸缩轴,所述伸缩轴竖直设置且滑动设置在所述中心套筒内,所述伸缩轴上端与所述推车底壁之间通过第一弹簧连接,所述伸缩轴下端与所述陶瓷滑辊转动连接;
14.刹车块,所述刹车块固定设置在所述中心套筒下端,所述伸缩轴向上滑动时所述刹车块能够与所述陶瓷滑辊抵接;
15.撑杆,所述撑杆倾斜设置,撑杆下端与所述伸缩轴下端铰接,且撑杆上端铰接有支撑块,所述支撑块与所述推车下端面抵接,所述推车下端面固定设置有若干挡块,所述挡块设置为三角形且直线排列,所述支撑块与其中一挡块抵接;
16.伸缩套筒,两个所述伸缩套筒对称设置在所述中心套筒的两侧,所述伸缩套筒竖直设置且上端与所述推车下端面固定连接;
17.伸缩推杆,所述伸缩推杆竖直设置且滑动设置在所述伸缩套筒内,所述伸缩推杆上端与所述推车底壁之间通过第二弹簧连接,所述伸缩推杆下端转动设置有转轮,所述转轮与所述撑杆抵接;
18.踏板,所述踏板水平设置且一端与所述伸缩推杆固定连接;
19.第三弹簧,所述第三弹簧一端与所述推车底壁固定连接,且第三弹簧另一端与所述撑杆固定连接;
20.连接杆,所述连接杆水平设置,且连接杆两端分别与两伸缩推杆固定连接。
21.优选的,所述车体上还设置有平衡组件,所述平衡组件包括:
22.平衡箱,所述平衡箱嵌设在所述车体内,且所述平衡箱内开设有平衡腔;
23.上中心杆,所述上中心杆竖直设置且设置在平衡箱顶壁中心处,所述上中心杆贯穿所述平衡箱顶壁且与所述平衡箱顶壁转动连接,所述平衡箱底壁处同样转动设置有下中心杆;
24.上平衡套筒,所述上平衡套筒套设在所述上中心杆上,所述上平衡套筒与所述平衡箱顶壁转动连接,上平衡套筒与所述上中心杆转动连接,所述下中心杆上同样套设有下平衡套筒;
25.安装块,所述上中心杆、上平衡套筒、下中心杆和下平衡套筒上分别固定设置有安装块,所述安装块上转动设置有安装凸柱,所述安装凸柱水平设置;
26.平衡杆,所述平衡杆水平设置且一端与所述安装凸柱转动连接,所述平衡杆远离所述安装凸柱的一端转动设置有平衡轮,初始位置时四个所述平衡杆以所述上中心杆轴线为中心圆周阵列设置,即相邻两平衡杆相互垂直;
27.平衡板,三个所述平衡板由上往下等距离间隔水平设置在所述平衡箱内,所述平衡板设置为环状,四个所述平衡轮分别沿所述平衡板和所述平衡箱底壁滚动,所述平衡杆和所述平衡箱底壁设置为轻微凹面,且凹面最低处为初始位置时所述平衡轮所在位置;
28.上脚垫,所述平衡箱上侧外壁上固定设置有四个上基座,四个所述上基座分别与四个所述平衡轮初始位置时对应,所述上基座上螺纹连接有上脚杆,所述上脚杆竖直设置且上脚杆远离所述上基座的一端转动设置有上脚垫,所述平衡箱下侧外壁上同样设置有下基座,所述下基座上同样螺纹连接有下脚杆,所述下脚杆上固定连接有下脚垫,所述上脚垫和所述下脚垫分别与所述车体抵接;
29.第一主动链轮,所述上中心轴位于所述平衡箱外部的端部固定设置有第一主动链轮,其中一个所述上脚杆上固定设置有第一被动链轮,所述第一主动链轮与所述第一被动
链轮之间通过链条连接传动,所述第一被动链轮与上中心轴上的平衡轮以上中心轴为中心对称;
30.第二主动链轮,所述上平衡套筒位于所述平衡箱外部的端部固定设置有第二主动链轮,其中一个所述上脚杆上固定设置有第二被动链轮,所述第二被动链轮与所述第二主动链轮之间通过链条传动连接,所述第二被动链轮与上平衡套筒上的平衡轮以上中心轴为中心对称,所述下中心轴和所述下平衡套筒上同样分别设置有第三主动链轮和第四主动链轮,对应位置的所述下脚杆上同样设置有第三被动链轮和第四被动链轮,第三被动链轮与第三主动链轮通过链条连接传动,第四主动链轮和第四被动链轮通过链条传动连接;
31.中心板,所述中心板设置在所述车体上,所述车体上表面开设有通孔,所述平衡箱上表面谷底设置有竖连杆,所述竖连杆竖直设置与所述中心板固定连接,所述推车放置在所述车体上。
32.优选的,显微观察系统,包括:挡停组件、升降组件、观察组件、电控柜、人机交互组件和主体框架,所述挡停组件固定设置在所述主体框架上用于对管阀框架的位置进行限定,所述升降组件设置在所述主体框架上用于控制管阀框架升降,所述观察组件设置在所述主体框架上用于观测细胞工厂,所述人机交互组件包括显示器,所述显示器与所述观察组件电连接,所述电控柜固定设置在所述主体框架上用于控制各组件运行。
33.优选的,所述挡停组件包括:微动电缸、支架、挡停轴和直线轴承,所述支架固定设置在所述主体框架上,所述微动电缸设置在所述支架上,所述挡停轴与所述微动电缸固定连接,所述直线轴承设置在所述挡停轴上;
34.所述升降组件包括:升降框架、伺服电机和同步举升器,所述升降框架固定设置在所述主体框架上,所述伺服电机固定设置在所述升降框架上,四个所述同步举升器设置在所述升降框架四角,所述伺服电机通过链条传动驱动同步举升器。
35.优选的,所述观察组件包括两组观察模块,每组所述观察模块包括:x轴滑台、y轴滑台、z轴电缸和观测器,所述x轴滑台固定设置在所述主体框架上,所述y轴滑台滑动设置在所述x轴滑台上,且y轴滑台滑动方向为x轴滑台长度方向,所述y轴滑台垂直于所述x轴滑台,所述z轴电缸滑动设置在所述y轴滑台上且滑动方向为y轴滑台长度方向,所述z轴电缸输出轴垂直于所述x轴滑台和y轴滑台所在平面,所述观测器固定设置在所述z轴电缸输出轴上,两组所述观察模块分别设置在所述主体框架上端和下端,所述主体框架下端固定设置有脚轮。
36.优选的,所述z轴电缸输出轴上还设置有换镜组件,所述换镜组件包括:
37.基座盘,所述基座盘固定设置在所述z轴电缸输出轴上,所述基座盘水平设置,所述观测器固定设置在所述基座盘下表面;
38.换镜盘,所述换镜盘设置在所述基座盘下方且与所述基座盘平行设置,所述基座盘下端面固定设置有第一中心轴,所述第一中心轴竖直设置,所述换镜盘转动设置在所述第一中心轴上,所述换镜盘外侧设置有棘齿,所述换镜盘上圆周阵列设置有若干镜头,镜头位于所述观测器下方;
39.换镜电机,所述换镜电机固定设置在所述基座盘下表面且位于所述换镜盘侧部,所述换镜电机输出轴竖直设置,换镜电机输出轴上固定设置有第一曲柄,所述第一曲柄远离所述换镜电机输出轴的一端铰接设置有第二曲柄,所述第二曲柄远离第一曲柄的一端转
动设置有第一凸柱;
40.拨动块,所述拨动块设置为三角形且拨动块所在平面平行与所述换镜盘,所述第一凸柱与拨动块一角转动连接,所述拨动块另一角转动设置有第二凸柱,所述第二凸柱上端与所述基座盘固定连接,所述拨动块最后一个角处固定设置有第三凸柱;
41.第一棘爪,所述第一转动设置在所述第三凸柱上,且第一棘爪与第三凸柱之间设置有扭簧,所述第一棘爪与所述换镜盘外侧的棘齿配合用于拨动换镜盘;
42.第二棘爪,所述第二棘爪设置在所述换镜盘侧部,所述第二棘爪上转动设置有第四凸柱,所述第二棘爪与所述第四凸柱之间设置有扭簧,所述第四凸柱上端与所述基座盘固定连接,换镜盘转动时棘齿拨动第二棘爪,所述第二棘爪上固定设置有拨杆;
43.清洁盒,所述清洁盒设置为l型结构且上端与基座盘固定连接,清洁盒下端位于镜头正下方,镜头下方清洁盒上设置有限位板,所述限位板下端面与所述清洁盒之间通过限位弹簧连接,所述限位板上叠放有若干擦镜纸;
44.平动杆,所述平动杆穿过所述清洁盒侧壁且与所述清洁盒铰接,所述平动杆靠近擦镜纸的一端固定设置有搓纸轮,所述搓纸轮压放在擦镜纸上,所述平动杆远离所述搓纸轮的一端通过拉绳与所述拨杆固定连接。
45.本发明的工作原理和有益效果如下:工作时,将细胞工厂固定在管阀框架上,同时管阀压板组件固定在管阀框架上且与细胞工厂连接,从而通过管阀压板组件的蠕动泵管阀来精确控制细胞工厂的进排液,避免人工操作时将细胞工厂取下再进行排液的繁琐操作,同时在需要时通过转运车移动管阀框架,从而解决细胞工厂进排液人工操作时劳动强度大、液体扰动大的问题。
46.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
47.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
48.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
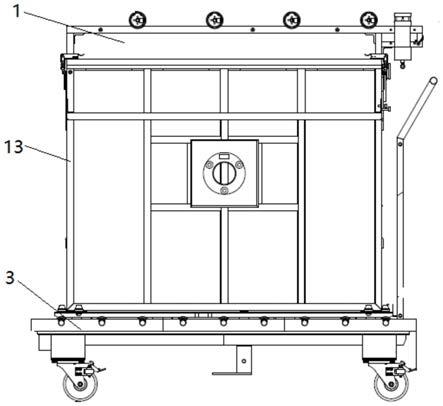
49.图1为本发明实施例中一种用于细胞工厂制备生物制品的管阀框架结构示意图;
50.图2为本发明实施例中一种用于细胞工厂制备生物制品的管阀框架中管阀压板组件结构示意图;
51.图3为本发明实施例中一种用于细胞工厂制备生物制品的管阀框架中转运车结构示意图;
52.图4为本发明实施例中一种用于细胞工厂制备生物制品的管阀框架中伸缩组件结构示意图;
53.图5为本发明实施例中一种用于细胞工厂制备生物制品的管阀框架中平衡组件结构示意图一;
54.图6为本发明实施例中一种用于细胞工厂制备生物制品的管阀框架中平衡组件结构示意图二;
55.图7为本发明实施例中一种显微观察系统结构示意图;
56.图8为本发明实施例中一种显微观察系统中挡停组件结构示意图;
57.图9为本发明实施例中一种显微观察系统中升降组件结构示意图;
58.图10为本发明实施例中一种显微观察系统中观察组件结构示意图;
59.图11为本发明实施例中一种显微观察系统中主体框架和脚轮结构示意图;
60.图12为本发明实施例中一种显微观察系统中换镜组件结构示意图一;
61.图13为本发明实施例中一种显微观察系统中换镜组件结构示意图二。
62.附图中的标记如下:1、管阀压板组件;11、压板箱;12、蠕动泵管阀;13、不锈钢框架;2、换镜组件;201、基座盘;202、换镜盘;203、第一中心轴;204、镜头;205、换镜电机;206、第一曲柄;207、第一凸柱;208、拨动块;209、第二凸柱;210、第三凸柱;211、第一棘爪;212、第二棘爪;213、第四凸柱;214、拨杆;215、清洁盒;216、限位板;217、限位弹簧;218、平动杆;219、搓纸轮;220、拉绳;221、第二曲柄;3、转运车;31、车体;32、万向轮;33、把手;34、推车;35、陶瓷滑辊;4、挡停组件;41、微动电缸;42、支架;43、挡停轴;44、直线轴承;5、升降组件;51、升降框架;52、伺服电机;53、同步举升器;6、观察组件;61、观察模块;611、x轴滑台;612、y轴滑台;613、z轴电缸;614、观测器;7、主体框架;71、电控柜;72、人机交互组件;721、显示器;73、脚轮;8、伸缩组件;801、中心套筒;802、伸缩轴;803、第一弹簧;804、刹车块;805、撑杆;806、支撑块;807、挡块;808、伸缩套筒;809、伸缩推杆;810、第二弹簧;811、转轮;812、踏板;813、第三弹簧;814、连接杆;9、平衡组件;901、上中心杆;902、下中心杆;903、上平衡套筒;904、下平衡套筒;905、安装块;906、安装凸柱;907、平衡杆;908、平衡轮;909、平衡板;910、上基座;911、上脚杆;912、上脚垫;913、下基座;914、下脚杆;915、下脚垫;916、第一主动链轮;917、第一被动链轮;918、第二主动链轮;919、第二被动链轮;920、第三主动链轮;921、第三被动链轮;922、第四主动链轮;923、第四被动链轮;924、中心板;925、竖连杆;926、平衡箱。
具体实施方式
63.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
64.本发明实施例提供了一种细胞工厂制备生物制品的管阀框架及显微观察系统,如图1所示,包括:管阀压板组件1、不锈钢框架13和转运车3,所述管阀压板组件1设置在所述不锈钢框架13上且与细胞工厂管路连通,管阀压板组件1用于控制细胞工厂的进排液,所述不锈钢框架13设置在所述转运车3上,所述不锈钢框架13内安装有显微观察系统。
65.上述技术方案的工作原理及有益技术效果:工作时,将细胞工厂固定在管阀框架上,同时管阀压板组件1固定在管阀框架上且与细胞工厂连接,从而通过管阀压板组件1的蠕动泵管阀12来精确控制细胞工厂的进排液,避免人工操作时将细胞工厂取下再进行排液的繁琐操作,同时在需要时通过转运车3移动管阀框架,从而解决细胞工厂进排液人工操作时劳动强度大、液体扰动大的问题。
66.在一个实施例中,如图2所示,所述管阀压板组件1包括压板箱11,所述压板箱11与所述不锈钢框架13卡接,所述压板箱11上固定设置有六个蠕动泵管阀12,其中四个所述蠕动泵管阀12分别用于控制细胞工厂管路的启闭,另外两个所述蠕动泵管阀12分别用于控制
主进液管路和主排液管路的启闭。
67.上述技术方案的工作原理及有益技术效果:管阀框架使用时,管阀压板组件1通过采用卡扣结构与细胞工厂框架侧壁进行卡合,在压板内侧铺有硅胶,保证压板与细胞工厂弹性接触,保证细胞工厂被压紧,同时在操作的过程中不会对细胞工厂造成应力破坏,方便人工拆卸及维护,在压板上有六个气动管阀,其中四个用于控制每一个细胞工厂的管路开闭,另外两个分别控制主进液管路和主排液管路开闭。六个气动阀门在机器人控制系统的信号控制下分时开闭,不仅可以保证每一个细胞工厂进、排液准确定量,而且可以采用独立的进、排液主管路,避免进、排液混液中和,降低试剂用量节约成本。
68.在一个实施例中,如图3所示,所述转运车3包括:
69.车体31,所述车体31水平设置,且车体31下端面四角处固定设置有万向轮32,所述不锈钢框架13放置在所述车体31上;
70.把手33,所述把手33固定设置在所述车体31上用于推动所述车体31。
71.上述技术方案的工作原理及有益技术效果:通过设置转运车3并将管阀框架设置在转运车3上,在需要时能够通过把手33推动车体31从而对管阀框架进行运输,避免人工运输时扰动大的问题。
72.在一个实施例中,所述车体31上设置有推车34,所述推车34水平设置在所述车体31上,所述推车34下端设置有陶瓷滑辊35。
73.上述技术方案的工作原理及有益技术效果:通过设置推车34,可以实现车体31与推车34分离,在显微观察的情况下,可以将推车34和管阀框架推入观察系统,车体31不需要进入显微观察系统,避免移动过程中导致的晃动对细胞工厂造成扰动。
74.在一个实施例中,所述推车34与所述陶瓷滑辊35之间还设置有伸缩组件8,如图4所示,所述伸缩组件8包括:
75.中心套筒801,所述中心套筒801竖直设置在所述推车34下端面;
76.伸缩轴802,所述伸缩轴802竖直设置且滑动设置在所述中心套筒801内,所述伸缩轴802上端与所述推车34底壁之间通过第一弹簧803连接,所述伸缩轴802下端与所述陶瓷滑辊35转动连接;
77.刹车块804,所述刹车块804固定设置在所述中心套筒801下端,所述伸缩轴802向上滑动时所述刹车块804能够与所述陶瓷滑辊35抵接;
78.撑杆805,所述撑杆805倾斜设置,撑杆805下端与所述伸缩轴802下端铰接,且撑杆805上端铰接有支撑块806,所述支撑块806与所述推车34下端面抵接,所述推车34下端面固定设置有若干挡块807,所述挡块807设置为三角形且直线排列,所述支撑块806与其中一挡块807抵接;
79.伸缩套筒808,两个所述伸缩套筒808对称设置在所述中心套筒801的两侧,所述伸缩套筒808竖直设置且上端与所述推车34下端面固定连接;
80.伸缩推杆809,所述伸缩推杆809竖直设置且滑动设置在所述伸缩套筒808内,所述伸缩推杆809上端与所述推车34底壁之间通过第二弹簧810连接,所述伸缩推杆809下端转动设置有转轮811,所述转轮811与所述撑杆805抵接;
81.踏板812,所述踏板812水平设置且一端与所述伸缩推杆809固定连接;
82.第三弹簧813,所述第三弹簧813一端与所述推车34底壁固定连接,且第三弹簧813
另一端与所述撑杆805固定连接;
83.连接杆814,所述连接杆814水平设置,且连接杆814两端分别与两伸缩推杆809固定连接。
84.上述技术方案的工作原理及有益技术效果:使用时,伸缩轴滑动设置在中心套筒801内,当推车34放置在车体31上时,伸缩轴收进中心套筒801内,此时刹车块804与陶瓷滑辊35抵接,从而避免陶瓷滑辊35转动导致细胞工厂发生晃动,当需要将推车34取下时,此时脚踩踏板812,踏板812带动伸缩推杆809向下运动,伸缩推杆809向下运动时转轮811与撑杆805抵接带动撑杆805向下运动,撑杆805向下运动时带动伸缩轴802向下运动伸出,同时支撑块806与当前挡块807脱离,当伸缩轴802伸出至陶瓷滑辊35刚好与地面接触,此时在第三弹簧813的拉动作用下支撑块806与现有位置的挡块807抵接,从而完成对伸缩轴802的支撑,从而使得上方的推车34在竖直方向上不会发生大范围的位移,从而避免对细胞工厂造成更大的扰动。
85.在一个实施例中,所述车体31上还设置有平衡组件9,如图5和图6所示,所述平衡组件9包括:
86.平衡箱926,所述平衡箱926嵌设在所述车体31内,且所述平衡箱926内开设有平衡腔;
87.上中心杆901,所述上中心杆901竖直设置且设置在平衡箱926顶壁中心处,所述上中心杆901贯穿所述平衡箱926顶壁且与所述平衡箱926顶壁转动连接,所述平衡箱926底壁处同样转动设置有下中心杆902;
88.上平衡套筒903,所述上平衡套筒903套设在所述上中心杆901上,所述上平衡套筒903与所述平衡箱926顶壁转动连接,上平衡套筒903与所述上中心杆901转动连接,所述下中心杆902上同样套设有下平衡套筒904;
89.安装块905,所述上中心杆901、上平衡套筒903、下中心杆902和下平衡套筒904上分别固定设置有安装块905,所述安装块905上转动设置有安装凸柱906,所述安装凸柱906水平设置;
90.平衡杆907,所述平衡杆907水平设置且一端与所述安装凸柱906转动连接,所述平衡杆907远离所述安装凸柱906的一端转动设置有平衡轮908,初始位置时四个所述平衡杆907以所述上中心杆901轴线为中心圆周阵列设置,即相邻两平衡杆907相互垂直;
91.平衡板909,三个所述平衡板909由上往下等距离间隔水平设置在所述平衡箱926内,所述平衡板909设置为环状,四个所述平衡轮908分别沿所述平衡板909和所述平衡箱926底壁滚动,所述平衡杆907和所述平衡箱926底壁设置为轻微凹面,且凹面最低处为初始位置时所述平衡轮908所在位置;
92.上脚垫912,所述平衡箱926上侧外壁上固定设置有四个上基座910,四个所述上基座910分别与四个所述平衡轮908初始位置时对应,所述上基座910上螺纹连接有上脚杆911,所述上脚杆911竖直设置且上脚杆911远离所述上基座910的一端转动设置有上脚垫912,所述平衡箱926下侧外壁上同样设置有下基座913,所述下基座913上同样螺纹连接有下脚杆914,所述下脚杆914上固定连接有下脚垫915,所述上脚垫912和所述下脚垫915分别与所述车体31抵接;
93.第一主动链轮916,所述上中心轴位于所述平衡箱926外部的端部固定设置有第一
主动链轮916,其中一个所述上脚杆911上固定设置有第一被动链轮917,所述第一主动链轮916与所述第一被动链轮917之间通过链条连接传动,所述第一被动链轮917与上中心轴上的平衡轮908以上中心轴为中心对称;
94.第二主动链轮918,所述上平衡套筒903位于所述平衡箱926外部的端部固定设置有第二主动链轮918,其中一个所述上脚杆911上固定设置有第二被动链轮919,所述第二被动链轮919与所述第二主动链轮918之间通过链条传动连接,所述第二被动链轮919与上平衡套筒903上的平衡轮908以上中心轴为中心对称,所述下中心轴和所述下平衡套筒904上同样分别设置有第三主动链轮920和第四主动链轮922,对应位置的所述下脚杆914上同样设置有第三被动链轮921和第四被动链轮923,第三被动链轮921与第三主动链轮920通过链条连接传动,第四主动链轮922和第四被动链轮923通过链条传动连接;
95.中心板924,所述中心板924设置在所述车体31上,所述车体31上表面开设有通孔,所述平衡箱926上表面谷底设置有竖连杆925,所述竖连杆925竖直设置与所述中心板924固定连接,所述推车34放置在所述车体31上。
96.上述技术方案的工作原理及有益技术效果:当车体31运动至略微倾斜的地面时,平衡轮908在重力作用下脱离初始位置朝最低处运动,平衡轮908运动过程中通过平衡杆907带动上中心杆901、上平衡套筒903、下中心杆902和下平衡套筒904分别发生转动,随后分别带动对应的链轮转动,通过链轮链条传动带动对应上脚杆911或下脚杆914转动,由于上脚杆911与上基座910螺纹连接,下脚杆914与下基座913螺纹连接,从而调整上脚杆911或下脚杆914的伸出长度,从而使得平衡箱926始终处于平衡位置,从而使得平衡板909始终处于水平,进而使得放置在中心板924上的推车34始终处于水平位置,避免倾斜时对细胞工厂造成影响。
97.本发明实施例还提供了一种显微观察系统,如图7所示,包括:挡停组件4、升降组件5、观察组件6、电控柜71、人机交互组件72和主体框架7,所述挡停组件4固定设置在所述主体框架7上用于对管阀框架的位置进行限定,所述升降组件5设置在所述主体框架7上用于控制管阀框架升降,所述观察组件6设置在所述主体框架7上用于观测细胞工厂,所述人机交互组件72包括显示器721,所述显示器721与所述观察组件6电连接,所述电控柜71固定设置在所述主体框架7上用于控制各组件运行。
98.上述技术方案的工作原理及有益技术效果:使用时,操作人员推动框架,将转运车3推车34与车体31分离并进入显微观察系统内部,当框架完全进入显微观察系统主体框架7内部时,到位传感器发出信号,控制挡停组件4将细胞工厂框架进行位置限位锁死,挡停组件4将细胞工厂框架限位锁死之后,操作人员可以在人机交互组件72操作升降组件5,将细胞工厂框架提升到观测位置。到达观测位置后,到位传感器发出信号,随后操作人员控制观察组件6对细胞工厂进行观察。观测结束后,操作人员将升降组件5复位,挡停组件4解锁,挡停组件4解锁完成后,人机交互组件72提示操作人员拉出细胞工厂框架,重新放置回转运车3,随后操作人员利用转运车3将细胞工厂框架推回培养室或下一操作工作,显微观察操作完成。
99.在一个实施例中,如图8和图9所示,所述挡停组件4包括:微动电缸41、支架42、挡停轴43和直线轴承44,所述支架42固定设置在所述主体框架7上,所述微动电缸41设置在所述支架42上,所述挡停轴43与所述微动电缸41固定连接,所述直线轴承44设置在所述挡停
轴43上;
100.所述升降组件5包括:升降框架51、伺服电机52和同步举升器53,所述升降框架51固定设置在所述主体框架7上,所述伺服电机52固定设置在所述升降框架51上,四个所述同步举升器53设置在所述升降框架51四角,所述伺服电机52通过链条传动驱动同步举升器53。
101.上述技术方案的工作原理及有益技术效果:当管阀框架进入显微观察系统框架主体后,微动电缸41启动带动推动挡停轴43伸出,从而对管阀框架进行抵接限位,避免观察时移动影响观察准确度;升降组件5工作时,伺服电机52启动通过链条传动带动同步举升器53,同步举升器53从四角同时推动推车34上下移动,从而带动细胞工厂框架同步升降移动。从而将细胞工厂框架精准的提升到观察位置,以便工作人员通过观察组件6中的相机对细胞工厂内的细胞生长状态进行观测。
102.在一个实施例中,如图10和图11所示,所述观察组件6包括两组观察模块61,每组所述观察模块61包括:x轴滑台611、y轴滑台612、z轴电缸613和观测器614,所述x轴滑台611固定设置在所述主体框架7上,所述y轴滑台612滑动设置在所述x轴滑台611上,且y轴滑台612滑动方向为x轴滑台611长度方向,所述y轴滑台612垂直于所述x轴滑台611,所述z轴电缸613滑动设置在所述y轴滑台612上且滑动方向为y轴滑台612长度方向,所述z轴电缸613输出轴垂直于所述x轴滑台611和y轴滑台612所在平面,所述观测器614固定设置在所述z轴电缸613输出轴上,两组所述观察模块61分别设置在所述主体框架7上端和下端,所述主体框架7下端固定设置有脚轮73。
103.上述技术方案的工作原理及有益技术效果:观察组件6工作时,通过设置相互滑动设置的x轴滑台611、y轴滑台612和z轴电缸613,能够带动观测器614实现三维空间内的任意方向移动,从而能够实现对任意位置的细胞工厂进行观测,同时,通过设置脚轮73,能够方便地对细胞工厂进行移动,提升装置的实用性。
104.在一个实施例中,所述z轴电缸613输出轴上还设置有换镜组件2,如图12和图13所示,所述换镜组件2包括:
105.基座盘201,所述基座盘201固定设置在所述z轴电缸613输出轴上,所述基座盘201水平设置,所述观测器614固定设置在所述基座盘201下表面;
106.换镜盘202,所述换镜盘202设置在所述基座盘201下方且与所述基座盘201平行设置,所述基座盘201下端面固定设置有第一中心轴203,所述第一中心轴203竖直设置,所述换镜盘202转动设置在所述第一中心轴203上,所述换镜盘202外侧设置有棘齿,所述换镜盘202上圆周阵列设置有若干镜头204,镜头204位于所述观测器614下方;
107.换镜电机205,所述换镜电机205固定设置在所述基座盘201下表面且位于所述换镜盘202侧部,所述换镜电机205输出轴竖直设置,换镜电机205输出轴上固定设置有第一曲柄206,所述第一曲柄206远离所述换镜电机205输出轴的一端铰接设置有第二曲柄221,所述第二曲柄221远离第一曲柄206的一端转动设置有第一凸柱207;
108.拨动块208,所述拨动块208设置为三角形且拨动块208所在平面平行与所述换镜盘202,所述第一凸柱207与拨动块208一角转动连接,所述拨动块208另一角转动设置有第二凸柱209,所述第二凸柱209上端与所述基座盘201固定连接,所述拨动块208最后一个角处固定设置有第三凸柱210;
109.第一棘爪211,所述第一转动设置在所述第三凸柱210上,且第一棘爪211与第三凸柱210之间设置有扭簧,所述第一棘爪211与所述换镜盘202外侧的棘齿配合用于拨动换镜盘202;
110.第二棘爪212,所述第二棘爪212设置在所述换镜盘202侧部,所述第二棘爪212上转动设置有第四凸柱213,所述第二棘爪212与所述第四凸柱213之间设置有扭簧,所述第四凸柱213上端与所述基座盘201固定连接,换镜盘202转动时棘齿拨动第二棘爪212,所述第二棘爪212上固定设置有拨杆214;
111.清洁盒215,所述清洁盒215设置为l型结构且上端与基座盘201固定连接,清洁盒215下端位于镜头204正下方,镜头204下方清洁盒215上设置有限位板216,所述限位板216下端面与所述清洁盒215之间通过限位弹簧217连接,所述限位板216上叠放有若干擦镜纸;
112.平动杆218,所述平动杆218穿过所述清洁盒215侧壁且与所述清洁盒215铰接,所述平动杆218靠近擦镜纸的一端固定设置有搓纸轮219,所述搓纸轮219压放在擦镜纸上,所述平动杆218远离所述搓纸轮219的一端通过拉绳220与所述拨杆214固定连接。
113.上述技术方案的工作原理及有益技术效果:显微观察系统使用时,其中一个镜头204位于观测器614正下方,通过观测器614与镜头204正对设置能够更好地调整放大倍数,进行更好地观测,当需要进一步调整观测倍数时,换镜电机205启动并带动第一曲柄206转动,第一曲柄206转动时带动第二曲柄221摆动,进而带动拨动块208以第二凸柱209为中心摆动,拨动块208摆动时带动第一棘爪211拨动换镜盘202转动,从而更换至另一不同倍数的镜头204位于观测器614正下方,同时,换镜盘202转动时擦镜纸对镜头204进行擦拭,避免镜头204被杂质遮挡,换镜盘202转动时拨动第二棘爪212,第二棘爪212通过拨杆214以及拉绳220拉动平动杆218,平动杆218水平摆动时搓纸轮219将最上层的擦镜纸拨动到旁边,从而避免同一张擦镜纸重复使用对后面的镜头204造成污染。
114.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1