一种基于钕铁硼的有机复合材料、仿蛙软体机器人及其制备方法
1.本发明涉及复合材料技术领域,具体涉及一种基于钕铁硼的有机复合材 料、仿蛙软体机器人及其制备方法。
背景技术:
2.一般的刚性机器人主要是由一定强度的硬质材料经过结构化设计,再通 过模块化的机械运动副,由刚性连接器与外壳制作而成,多使用马达作为动力装 置驱动,其具有控制精度高、运行速率快以及输出力大等优势,但是传统机器人 具有结构较为固定、结构复杂、不够灵活、运动笨重、惯性大等缺点,这些缺点 限制了传统机器人在一定范围内的应用,使得它在一些特殊环境中无法精准控制 运动、适应空间形状复杂的通道、通过狭小的空间等,因此刚性机器人的环境适 应能力较差。近些年来,为了解决刚性机器人的种种缺点与不足,仿生技术与智 能材料的研究逐渐深入,研究者们以自然界中的软体动物为参考研究的原始模 型,提出了软体机器人的概念。软体机器人多采用高聚复合材料、液态金属合金、 永磁材料、高分子化合物等柔性材料复合而成,制作过程中柔性材料的使用使得 软体机器人的整体质量较轻,可以通过模仿生物结构构造、生物运动模式,在运 动过程中通过改变原有的结构形状及尺寸,使其能够拥有更多的自由度和多种模 式进行驱动,实现爬行、跳跃、扭转、抓取等动作操作。与传统的刚性机器人相 比软体机器人具有了更好的灵敏性、可拉伸性、环境适应性。
3.软体机器人在不断被研究、发展的过程中也伴随着一系列的问题、机遇 与挑战,对研制出的新型软体结构对制造材料、驱动技术及感应技术的要求越来 越高,当前使用的制作材料还存在许多问题,并不能完全满足所要实现的功能要 求,软材料的研究与使用过程中不可忽视韧性差、负载能力低、刚性差等问题, 这引起了国内外研究学者的关注,要想使材料在拥有更好柔性的同时具有较高的 韧性依然是一个要不断去深入研究的问题。此外传统材料对于软体机器人的可伸 展性、柔韧性以及扭转性已无法很好的应用,所以新型材料的研制成为一个仍需 解决的新问题,这些问题为逐步研究软体机器人提供了新的方向与对策。
技术实现要素:
4.本发明的目的是为解决现有技术中存在的问题,提供一种基于钕铁硼的 有机复合材料、仿蛙软体机器人及其制备方法。
5.本发明为解决上述技术问题的不足,所采用的技术方案是:一种基于钕 铁硼的有机复合材料,该材料由钕铁硼、共晶镓铟和聚二甲基硅氧烷复合制成。
6.作为本发明一种有机复合材料的进一步优化:材料中钕铁硼、共晶镓铟 和聚二甲基硅氧烷的含量之比为10:2-8:2-8。
7.一种基于钕铁硼的有机复合材料的制备方法:将钕铁硼和共晶镓铟加入 乙醇中,
搅拌均匀,然后加热使乙醇完全挥发,待冷却至室温后加入聚二甲基硅 氧烷,经高速搅拌后,即制得有机复合材料。
8.作为本发明一种基于钕铁硼的有机复合材料的制备方法的进一步优化: 聚二甲基硅氧烷由质量比为10:1的预聚物和交联剂聚合得到。
9.作为本发明一种基于钕铁硼的有机复合材料的制备方法的进一步优化: 高速搅拌时的搅拌速度为1200-1500r/min。
10.作为本发明一种基于钕铁硼的有机复合材料的制备方法的进一步优化: 两次搅拌的搅拌时间均不低于20min。
11.一种基于钕铁硼的软体机器人,该软体机器人呈“h”形结构,其材质 为经过充磁的上述有机复合材料,软体机器人位于同一端两个端头的极性以及位 于同一侧两个端头的极性均相反。
12.一种基于钕铁硼的软体机器人的制备方法,包括以下步骤:
13.1)、将有机复合材料放入真空干燥箱烘干,去除材料中的气泡;
14.2)、使用激光雕刻机将聚甲基丙烯酸甲酯板雕刻成为浇注模具;
15.3)、将除完气泡的有机复合材料缓慢倒入模具中,并置于烤箱中进行固 化处理,得到无磁软体机器人;
16.4)、利用充磁机对于无磁软体机器人的两端进行不同方向的充磁,得到 基于钕铁硼的软体机器人
17.作为本发明一种基于钕铁硼的软体机器人的制备方法的进一步优化:固 化处理过程中烤箱的温度设置为70℃,固化时间为20min。
18.本发明具有以下有益效果:本发明采用egain/ndfeb/pdms三种基础材 料,优化柔性复合膜的形状、尺寸、配比和制造工艺,使其作为柔性机器人的基 底能够发挥高性能优势。
附图说明
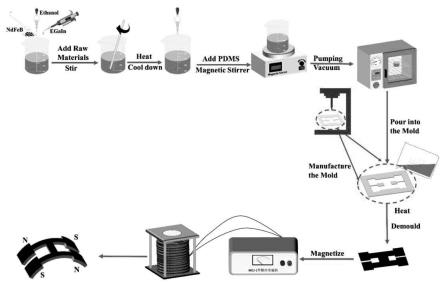
19.图1为本发明软体机器人制备工艺流程示意图;
20.图2为《实施例1》中制备得到有机复合材料的sem照片;
21.图3为《对比例1》中制备得到有机复合材料的sem照片;
22.图4为制备得到的七种柔性复合薄膜的实物照片;
23.图5为不同混合比下薄膜的应力-应变曲线及质构仪实操图;
24.图6为不同混合比下薄膜的弹性模量;
25.图7为不同混合比下复合膜处理72小时后不同比例复合膜的溶胀度;
26.图8为不同混合比下复合膜的交联密度;
27.图9为不同混合比下复合膜的撕裂能数据;
28.图10为柔性薄膜的温度/体积-时间曲线;
29.图11为柔性薄膜在不同材质平板上的位移—时间曲线图;
30.图12为60gs和40gs外磁场下,控制信号频率与软体机器人速度的关 联曲线图;
31.图13为在三维亥姆霍兹线圈产生的均匀磁场交替作用下,哑铃型柔性复 合薄膜的运动模式图;
32.图14为在三维亥姆霍兹线圈产生的均匀磁场交替作用下,h型柔性复合 薄膜的运动模式图;
33.图15为哑铃型柔性复合薄膜在均匀三维亥姆霍兹线圈磁场的作用下速 度-时间的拟合曲线图;
34.图16为h型柔性复合薄膜在均匀三维亥姆霍兹线圈磁场的作用下速度
‑ꢀ
时间的拟合曲线图。
具体实施方式
35.为了更好地理解本发明,下面结合实施例进一步阐明本发明的内容,但 本发明的内容并不局限于下面的实施例。
36.《实施例1》
37.一种基于钕铁硼的软体机器人的制备方法:包括以下步骤:
38.1)、首先称量0.4g的egaln、0.2g的nep和0.86g ethanol,并将它们放 在一个小烧杯中,之后,手动搅匀上述材料,时间30分钟。
39.2)、加热使乙醇完全挥发,冷却至室温后,加入1g的pdms(预聚物a 和交联剂b的比例为10:1),然后利用可调节的高速搅拌器搅拌混合物30分钟, 得到有机复合材料,其电镜照片如图2所示。
40.3)、将egain/nep/pdms混合物放入真空干燥箱25分钟后,以除去室 温下混合物中的气泡。
41.4)、使用激光雕刻机将聚甲基丙烯酸甲酯(pmma)板雕刻成h型结构 的模具。
42.5)、将除完气泡的混合物缓慢倒入模具中,放置70℃的烤箱20分钟, 其中确保混合物完全固化。
43.6)、最后对脱模的混合物利用充磁机对其两端进行不同方向的充磁,得 到自制的软体机器人。
44.制备过程中使用到的原料如下表所示:
[0045][0046]
钕铁硼(ndfeb)是具有高剩磁密度和磁学性能稀土永磁材料,目前 ndfeb在相关领域为磁性能最好的永磁材料,在电子、机械、通信等多个行业 广泛应用,其科研价值显著。
[0047]
聚二甲基硅氧烷(polydimethylsiloxane,pdms)又名硅酮、有机硅,为 疏水类的有机硅高分子化合物[20],它具有无色、无味、无毒以及流变特性等特 性,pdms当处于液体状态下时具有一定的流动性,因此注入模具时相对比较容 易。本实施例采用的道康宁sylgard 184硅橡胶,其中的pdms基本组份与 固化剂按质量比10:1混合。
[0048]
乙醇(ethanol,酒精),无色透明液体、味略刺激、易挥发、低毒性, 沸点为78.3℃,密度为0.789g/cm3,是一种有机化合物,在本研究中的作用为稀 释pdms预聚物,因为pdms
粘度较大的,当ndfeb磁粉末直接与pdms相互 混合不利于粉末均匀的分散,所以采用ndfeb磁粉末与乙醇相混合的方法。在 本研究中也作为一种有机溶剂,浸泡柔性复合薄膜使其溶胀,用来测试柔性复合 薄膜的溶胀性以及交联密度。
[0049]
钕铁硼(ndfeb)、共晶镓铟(egain)和聚二甲基硅氧烷(pdms)三 种材料经过一系列过程混合而成一种新型有机复合材料(nep),并用此复合材 料做基体,通过在两端进行不同方向的充磁得到软体机器人,在交变磁场下实现 仿蛙运动。
[0050]
《实施例2-6》
[0051]
实施例2-6为基于钕铁硼的软体机器人的制备方法,其制备过程与《实施 例1>基本相同,不同之处在于三种原料的加入量,实施例2-6中各原料的加入 量如下表所示:
[0052]
原料实施例2实施例3实施例4实施例5实施例6实施例7pdms(g)111111egaln(g)00.20.60.80.60.6ndfeb(g)0.20.20.20.20.40.8
[0053]
《对比例1》
[0054]
一种基于钕铁硼的软体机器人的制备方法:包括以下步骤:
[0055]
1)、首先称量0.4g的egaln和0.2g的nep,并将它们放在一个小烧杯 中,之后,手动搅匀上述材料,时间30分钟。
[0056]
2)、加入1g的pdms(预聚物a和交联剂b的比例为10∶1),然后利用 可调节的高速搅拌器搅拌混合物30分钟,得到有机复合材料,其电镜照片如图 3所示。
[0057]
《宏观形貌表征》
[0058]
取实施例《1-7》中制备得到的中间体(有机复合材料),将材料制作成正 方形柔性复合薄膜,其体积尺寸为10*10*1mm3。
[0059]
图4为制备得到的七种柔性复合薄膜的实物照片,直接观察柔性复合薄 膜可知薄膜整体呈现灰黑色,其中掺杂银白色材质。由于pdms在20℃温度下 密度为1g/ml,而ndfeb与egain的密度分别为6g/cm3和6.25g/cm3,即导致薄 膜在制备过程中ndfeb材料夹杂egain材料处于薄膜下层位置偏多,上层呈现 固化后光滑平整的pdms。另外观察在pdms:ndfeb为10∶2配比不变的情况 下改变egain的配比,pdms∶egain∶ndfeb分别为10∶0∶2、10∶2∶2、10∶4∶2、10:6:2、10:8:2,发现egain的含量占比越大薄膜越呈现银白色,薄膜越均匀。 观察在pdms:egain为10:6配比不变的情况下改变ndfeb的配比,pdms: egain:ndfeb分别为10:6:2、10:6:4、10:6:8,发现ndfeb的含量占比越大薄膜 越呈现灰黑色。
[0060]
《柔韧性》
[0061]
取实施例《1-7》中制备得到的中间体(有机复合材料),将材料制作成正 方形柔性复合薄膜,其体积尺寸为35*10*1mm3,作为试验材料。
[0062]
试验材料的拉伸测试均沿35mm的长度方向进行拉伸,将复合材料膜夹 紧在质构仪上。首先设定初始长度,在施加拉力后再次测量其长度,得到不同的 拉伸比。然后将不同拉伸比下的材料拉伸至其拉伸极限,并进行应力测量,整理 数据后得到应力-应变曲线,如图5。然后再计算各种比例对应下的弹性模量,如 图6所示。
[0063]
对比pdms:egain:ndfeb配比为10:6:2、10:6:4、10:6:8的柔性复合 薄膜,整体来看应力应变曲线图发现配比为10:6:8的柔性复合薄膜随着应力的增 加应变率增长速率最
慢且在拉伸过程中最早断裂,配比为10:6:4的柔性复合薄膜 随着应力的增加应变率增长速率最快但在拉伸过程中断裂时的拉伸长度仅次于 配比为10:6:8的柔性复合薄膜,配比为10:6:2的柔性复合薄膜应力应变之间的 斜率处于10:6:8与10:6:4之间但10:6:2的极限应变率高于10:6:8与10:6:4,对比 三组配比可知在pdms:egain配比不变的情况下ndfeb重量占比越多和越少 都不利于柔性复合薄膜的拉伸变形,因此ndfeb的含量影响了柔性复合薄膜的 拉伸性能。
[0064]
对比pdms:egain:ndfeb配比为10:0:2、10:2:2、10:4:2、10:6:2、10:8:2 的柔性复合薄膜,应力应变曲线前半部分斜率从大到小配比依次为10:2:2、 10:8:2、10:6:2、10:4:2、10:0:2,应力应变曲线后半部分斜率从大到小配比依次 为10:8:2、10:2:2、10:6:2、10:0:2、10:4:2,五种配比的应变率从大到小依次为 10:4:2、10:0:2、10:2:2、10:8:2、10:6:2,比较得出pdms:ndfeb为10:2固定 配比的应变率均高于pdms:egain为10:6固定配比的应变率,可以看出10:4:2 配比下的应力应变斜率较好且极限应变率最高,即可确定pdms:egain:ndfeb 为10:4:2配比的柔性复合薄膜为最佳配比。
[0065]
由图6分析可得,最佳比例下enp的弹性模量仅为1.17mpa。与传统 的刚性金属导体相比,emp的弹性模量降低了几个数量级,即复合材料的柔韧 性好,适合于制备成软体机器人的基体。
[0066]
《溶胀度与交联密度性能》
[0067]
取实施例《1-5》中制备得到的中间体(有机复合材料),将材料制作成正 方形柔性复合薄膜,其体积尺寸为10*10*1mm3。
[0068]
采用电子密度天平称量薄膜质量(wf),将样品放入盛有160ml乙醇的 烧杯中,在恒定25℃的温度下进行溶胀72h,样品达到溶胀平衡状态后,用滤纸 迅速擦干表面乙醇溶剂后,采用电子密度天平称量经过溶胀薄膜的质量(ws), 称量完成后将薄膜在80℃的电烤箱中干燥24h,随后再放入真空干燥箱中在70℃ 下真空环境进行干燥6h,薄膜中的乙醇干燥完成后称量除掉溶剂后薄膜的质量 (wd)。
[0069][0070]
交联密度(v);
[0071][0072]
式中,υ—薄膜交联密度;vr—薄膜溶胀后乙醇的体积分数;v0—乙醇 溶剂摩尔体积(59cm3/mol)、摩尔质量(46g/mol);ρ—薄膜密度;χ—薄膜与 溶剂相互作用参数。
[0073]
mc计算公式如下:
[0074][0075]
式中,mc—交联间聚合物平均分子量。
[0076]
vr按照下列公式计算。
[0077]
[0078]
式中,ρs—乙醇溶剂的密度(0.789g/cm3)。
[0079]
配比10∶0∶210∶2∶210∶4∶210∶6∶210∶8∶2溶胀度0.054850.046760.024460.0440.0238交联密度(10-3
mol/cm3)3.1822.471.520.1980.107
[0080]
根据上表数据和图7与图8所示的不同配比柔性复合薄膜的溶胀度与交 联密度,通过观察配比为10∶0∶2的薄膜溶胀度最大,配比为10∶4∶2和10∶8∶2的 薄膜溶胀度最小;配比为10∶0∶2的薄膜交联密度最大,配比为10∶6∶2和10∶8∶2 的薄膜交联密度最小。溶胀度小的疏水性更高,更有利于在溶液环境中应用,不 易胀大,溶胀度高的较为亲水,溶剂分子较易渗入,溶胀度的大小不仅受环境因 素(温度)的影响,还会受到自身形状与内部结构的影响。交联密度的增加会使 得分子运动减少、薄膜表面硬度更大、拉伸永久变形变小,交联密度若过大,则 薄膜的力学性能将会变差,由于交联密度计不能过大也不能过小,所以该研究选 择交联密度在1.4
×
10-3
mol/cm3~2.0
×
10-3
mol/cm3范围内的柔性复合薄膜最佳, 可以看出配比为10∶4∶2、10∶6∶2与10∶8∶2的柔性复合薄膜在一定程度下能较好的 遵循交联密度越大溶胀度越小这一理论,通过比较因配比为10∶6∶2与10∶8∶2的 柔性复合薄膜交联密度过小,所以确定配比为10∶4∶2的柔性复合薄膜性能最好。
[0081]
《撕裂能与热稳定性》
[0082]
取实施例《1》中制备得到的中间体(有机复合材料),将材料制作成3个 正方形柔性复合薄膜,其体积尺寸为10*10*1mm3。
[0083]
采用如裤型撕裂样品的形式进行测试撕裂能。柔性复合薄膜热膨胀系数 采用热机械分析法(tma)进行热稳定性测试分析,热机械分析法为接触测量, 被测柔性复合薄膜样品放入控温炉内,通过推杆向被测薄膜施加一定微小的力使 得与样品接触,随着温度的变化,被测柔性复合薄膜样品发生形变,对推杆产生 反推力致使推杆发生位移,此时位移的大小由高灵敏的位移转换器记录,同时记 录温度数据,获得位移随温度变化的曲线,在实验过程中还要分别对三组柔性复 合薄膜进行初始体积测试,调试设备后升高控温炉温度开始实验,从测试开始计 时,在温度均匀上升的情况下每隔15min进行一次被测柔性复合薄膜的体积测量 计算,每组记录7组数据,最后对三组测试的各个时间段的体积变化值取平均值, 得出在不同间隔时间的体积值如下表所示,柔性薄膜的温度/体积-时间曲线如图 10所示。
[0084]
时间(min)0153045607590温度(k)353.15363.15373.15383.15393.15403.15413.15体积(mm3)6.242476.780277.434628.092678.152439.2270310.16127体积变化率(%)08.61519.09729.63930.59647.81162.776
[0085]
撕裂能是柔性材料裂纹扩展性的关键因素,柔性材料的动态疲劳扩展速 率由撕裂能相关,与被测样品的几何形貌等无关,裂纹扩展法是指根据断裂力学 理论研究弹性体疲劳裂纹扩展的速率以及弹性体疲劳寿命的方法。通过图9可知 配比为10∶0∶2、10∶4∶2、10∶8∶2的撕裂能较大,表示这三种配比的柔性复合薄膜 具有更低的裂纹扩展速率,其抗疲劳特性更强,疲劳寿命相比于撕裂能较小的配 比更长。
[0086]
由图9计算得出配比10∶4∶2的柔性复合薄膜的线热膨胀系数为α =2.473763118
×
10-6
k-1
,参考其他专业文献可知vo2薄膜的热膨胀系数为α vo2=2.1
×
10-5
/℃,纳米碳化
硅复合薄膜的热膨胀系数为α纳米碳化硅=3.7
×ꢀ
10-6
~4.8
×
10-6
k-1
,纳米碳化硅复合薄膜具有耐高温、韧性好、相对密度小、低 热膨胀系数,通过比较发现本研究制作的柔性复合薄膜的热膨胀系数低了一个数 量级,表明本研究的柔性复合薄膜热稳定性更好且使用安全性、抗热震性能更高, 更能适应温差变化大的环境。
[0087]
《柔性复合薄膜运动性能》
[0088]
取实施例《1》中制备得到的中间体(有机复合材料),将材料制作成正方 形柔性复合薄膜,其体积尺寸为10*10*1mm3,检测柔性复合薄膜在不同摩擦系 数的表面的运动情况及材料对柔性复合薄膜速度的影响,分别将柔性复合薄膜在 白纸、亚克力板、玻璃板上进行运动测试,将柔性复合薄膜在三种材质的平板上 通过相同位移,在相同的磁场环境下进行运动,测试过程采集位移随时间的变化 数据,根据采集的数据信息绘制出如图11所示的位移-时间曲线图,通过对比 下表所示的柔性复合薄膜在不同粗糙度表面的平均速度数值可以得出柔性复合 薄膜在白纸上运动速度最快,其次为亚克力板,相比于白纸与亚克力板柔性复合 薄膜在玻璃板上的运动速度最慢。
[0089]
平面材质白纸亚克力板玻璃速度(mm/s)12.3434110.999048.09978
[0090]
根据图12中的实验结果,当外磁场不变时,随着控制信号频率的增加, 软体机器人的速度也增加并呈线性变化。此外,60gs外磁场下的速度高于40gs 外磁场下的速度。
[0091]
在三维亥姆霍兹线圈产生的均匀磁场交替作用下,哑铃型柔性复合薄膜 为伸缩型运动模式,如图13所示。
[0092]
h型柔性复合薄膜,在三维亥姆霍兹线圈产生的均匀磁场交替作用下, h型柔性复合薄膜为伸缩型运动模式,如图14所示。
[0093]
对于柔性复合薄膜的速度分析,首先测试研究h型柔性复合薄膜在均匀 三维亥姆霍兹线圈磁场中运动情况,将h型柔性复合薄膜放于白纸上,在磁场 作用下进行伸缩型运动,随着时间的变化记录下柔性复合薄膜的位移,根据实验 测得的数据绘制出如图15和16所示的速度-时间的拟合曲线图,h型柔性复合 薄膜在均匀三维亥姆霍兹线圈磁场的作用下速度最快可达48.3mm/s左右,随着 向前运动柔性复合薄膜的速度逐渐降低,通过分析得出这一现象的原因是运动过 程中柔性复合薄膜与运动平面之间的摩擦导致的,这也表明柔性复合薄膜运动平 面的摩擦系数对于薄膜的运动具有一定的影响。
[0094]
本发明利用三种基本材料,ndfeb/egain/pdms,来制备柔性复合薄膜 的基底。通过对其形状、尺寸、结构和材料配比的一系列实验分析,设计并制造 了一种具有高灵活性、运动可控性和环境适应性强的磁控软机器人。在应力应变 实验中,通过数据分析,nep的弹性模量为1.17mpa,表现出较高的变形性和 柔韧性。此外,nep具有较低的热膨胀系数(2.473763118
×
10-6
k-1
)、最佳溶胀度 (0.02446)、交联密度(1.52
×
10-3
mol/cm3)、接触角(113.5
°
)和撕裂能(7.36kj/m2), 表明柔性复合膜具有良好的热稳定性和高韧性,能适应高温、大温差和油污等恶 劣环境。nep的动作延迟时间为0.46s,动作速度为48.3mm/s,具有良好的磁控 灵敏度和稳定性。外部磁场和柔性机器人结构固有的弹性应力有利于实现复杂可 控的变形,在医疗诊断、粮食运输和多维驱动等领域显示出良好的应用前景。
[0095]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局 限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形 或修改,这并不影
响本发明的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1