域控制器关断路径电路及车辆的制作方法
1.本发明属于汽车域控制器技术领域,具体涉及域控制器关断路径电路及车辆。
背景技术:
2.汽车动力域控制器掌管了有关汽车动力的相关控制器的信息汇总与功能的调用。当动力域控制器程序未能按正常要求运行时,可能给动力域控制器所控制的eds(电机控制器)、dcdc(电源补给控制器)、bms(电池管理控制器)等动力相关控制器发送错误指令,如果动力相关控制器执行了错误的指令,可能造成整车失控,车上人员无法正常控制整车,情况十分危险。
3.因此,动力域控制器的功能安全必须作为重点的设计考虑。功能安全相关要求为,在动力域控制器程序未能按正常要求运行时,需要关闭唤醒信号给到域控制器所控制的eds(电机控制器)、dcdc(电源补给控制器)、bms(电池管理控制器)等动力相关的控制器,让动力相关的控制器知道动力域控制器目前正处于非正常情况,从而执行相关的功能安全,以降低车辆与车上人员的危险。
4.因此,有必要开发一种域控制器关断路径电路及车辆。
技术实现要素:
5.本发明的目的是提供一种域控制器关断路径电路及车辆,当域控制器的主单片机电路失效时,能关闭域控制器给外部控制器的唤醒信号。
6.第一方面,本发明所述的一种域控制器关断路径电路,包括集成于域控制器上的监控单片机电路、主单片机电路、驱动电路、can电路、电阻r1和三极管q1;所述三极管q1的基极与监控单片机电路 连接,监控单片机电路与主单片机电路进行spi通信,主单片机电路与can电路连接;所述三极管的集电极经电阻r1与主单片机电路连接,三极管q1的集电极还与驱动电路的en脚连接;所述三极管q1的发射极接地;所述主单片机电路通过can电路分别与各外部控制器连接;所述驱动电路分别与各外部控制器连接;主单片机电路正常情况下,在各外部控制器正常工作时,驱动电路输出的唤醒信号为高电平,在主单片机电路通过can电路对各外部控制器进行下电流程后,主单片机电路通过电阻r1控制驱动电路关闭唤醒信号,关闭后唤醒信号为低电平,各外部控制器关闭;主单片机电路异常情况下,监控单片机电路输出高电平给三极管q1,三极管q1导通,将驱动电路的en脚强行拉为低电平,使驱动电路关闭,此时驱动电路输出的唤醒信号为低电平,当各外部控制器收到唤醒信号为低电平时,启动自身的功能安全模式。
7.可选地,所述域控制器为动力域控制器。
8.可选地,所述外部控制器包括eds控制器、bms控制器和dcdc控制器,所述eds控制器、bms控制器和dcdc控制器分别与驱动电路的输出端连接,eds控制器、bms控制器和dcdc控制器还分别与can电路连接。
9.第二方面,本发明所述的一种车辆,采用如本发明所述的域控制器关断路径电路。
10.本发明具有以下优点:在域控制器的主单片机电路异常情况下,监控单片机电路输出高电平给三极管q1,三极管q1导通,将驱动电路的en脚强行拉为低电平,使驱动电路关闭,此时驱动电路输出的唤醒信号为低电平,当各外部控制器收到唤醒信号为低电平时,启动自身的功能安全模式,大大提升了车辆的安全性。
附图说明
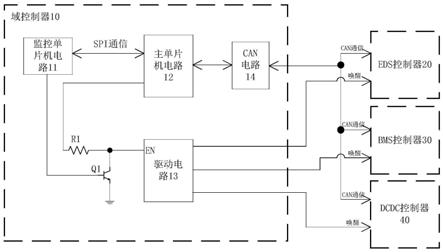
11.图1为本实施例的电路图;图中:10、域控制器,11、监控单片机电路,12、主单片机电路,13、驱动电路,14、can电路,20、eds控制器,30、bms控制器,40、dcdc控制器。
具体实施方式
12.以下结合附图对本发明进行详细的说明。
13.如图1所示,本实施例中,一种域控制器关断路径电路,包括集成于域控制器10上的监控单片机电路11、主单片机电路12、驱动电路13、can电路14、电阻r1和三极管q1;连接关系如下:所述三极管q1的基极与监控单片机单路11 连接,监控单片机单路11与主单片机电路12进行spi通信,主单片机电路12与can电路14连接。所述三极管的集电极经电阻r1与主单片机电路12连接,三极管q1的集电极还与驱动电路13的en脚连接。所述三极管q1的发射极接地。使用时,将主单片机电路12通过can电路14分别与外部控制器连接,将驱动电路13分别与各外部控制器连接。
14.本实施例中,监控单片机电路11 用于监控主单片机电路12是否正常工作,以及驱动三极管q1的开关。主单片机电路12用于发送自身健康状态给监控单片机电路11。电阻r1为限流电阻。
15.本实施例中,所述域控制器10为动力域控制器。所述外部控制器包括eds控制器20、bms控制器30和dcdc控制器40,所述eds控制器20、bms控制器30和dcdc控制器40分别与驱动电路13的输出端连接,eds控制器20、bms控制器30和dcdc控制器40还分别与can电路14连接。
16.以下以域控制器10为动力域控制器,外部控制器为eds控制器20、bms控制器30、dcdc控制器40为例,对本实施例的工作原理进行详细的说明。
17.当域控制器10的主单片机电路12正常时,在eds控制器20、bms控制器30、dcdc控制器40三个外部控制器正常工作时,此时,驱动电路13输出的唤醒信号为高电平;当主单片机电路12通过can电路14对eds控制器20、bms控制器30、dcdc控制器40进行下电流程后,主单片机电路12通过电阻r1控制驱动电路13再关闭唤醒信号,关闭后唤醒信号为低电平,eds控制器20、bms控制器30和dcdc控制器40这三个外部控制器均关闭。
18.当域控制器10的主单片机电路12失效,此时,can电路14无法正常与外部控制器进行通信;监控单片机电路11通过spi无法与主单片机电路12正常通信;此时,监控单片机电路11输出高电平给三极管q1,此时三极管q1处于导通状态,将驱动电路13的en脚强行拉为低电平,驱动电路13就此关闭。驱动电路13关闭后,驱动电路13输出的唤醒信号也变为低电
平。由于主单片机电路12失效,can电路14无法对eds控制器20、bms控制器30、dcdc控制器40三个外部控制器走下电流程;在没有can下电流程情况下,三个外部控制器收到唤醒信号变为低电平时,三个外部控制器将判断域控制器10功能异常,从而启动自身的功能安全模式。
技术特征:
1.一种域控制器关断路径电路,其特征在于:包括集成于域控制器(10)上的监控单片机电路(11)、主单片机电路(12)、驱动电路(13)、can电路(14)、电阻r1和三极管q1;所述三极管q1的基极与监控单片机电路(11)连接,监控单片机电路(11)与主单片机电路(12)进行spi通信,主单片机电路(12)与can电路(14)连接;所述三极管的集电极经电阻r1与主单片机电路(12)连接,三极管q1的集电极还与驱动电路(13)的en脚连接;所述三极管q1的发射极接地;所述主单片机电路(12)通过can电路(14)分别与各外部控制器连接;所述驱动电路(13)分别与各外部控制器连接;主单片机电路(12)正常情况下,在各外部控制器正常工作时,驱动电路(13)输出的唤醒信号为高电平,在主单片机电路(12)通过can电路(14)对各外部控制器进行下电流程后,主单片机电路(12)通过电阻r1控制驱动电路(13)关闭唤醒信号,关闭后唤醒信号为低电平,各外部控制器关闭;主单片机电路(12)异常情况下,监控单片机电路(11)输出高电平给三极管q1,三极管q1导通,将驱动电路(13)的en脚强行拉为低电平,使驱动电路(13)关闭,此时驱动电路(13)输出的唤醒信号为低电平,当各外部控制器收到唤醒信号为低电平时,启动自身的功能安全模式。2.根据权利要求1所述的域控制器关断路径电路,其特征在于:所述域控制器(10)为动力域控制器。3.根据权利要求1或2所述的域控制器关断路径电路,其特征在于:所述外部控制器包括eds控制器(20)、bms控制器(30)和dcdc控制器(40),所述eds控制器(20)、bms控制器(30)和dcdc控制器(40)分别与驱动电路(13)的输出端连接,eds控制器(20)、bms控制器(30)和dcdc控制器(40)还分别与can电路(14)连接。4.一种车辆,其特征在于:采用如权利要求1至3任一所述的域控制器关断路径电路。
技术总结
本发明公开了一种域控制器关断路径电路及车辆,包括集成于域控制器上的监控单片机电路、主单片机电路、驱动电路、CAN电路、电阻R1和三极管Q1;所述三极管Q1的基极与监控单片机电路连接,监控单片机电路与主单片机电路进行SPI通信,主单片机电路与CAN电路连接;所述三极管的集电极经电阻R1与主单片机电路连接,三极管Q1的集电极还与驱动电路的EN脚连接;所述三极管Q1的发射极接地;所述主单片机电路通过CAN电路分别与各外部控制器连接;所述驱动电路分别与各外部控制器连接。当域控制器的主单片机电路失效时,本发明能够关闭域控制器给外部控制器的唤醒信号。部控制器的唤醒信号。部控制器的唤醒信号。
技术研发人员:赵迪 肖利华 李祥 童斌 杜露涛
受保护的技术使用者:重庆长安新能源汽车科技有限公司
技术研发日:2021.07.29
技术公布日:2021/9/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1