一种基于毫米波雷达用于车辆防追尾的监控装置的制作方法
1.本实用新型涉及了一种汽车辅助控制装置,尤其是涉及了一种基于毫米波雷达用于车辆防追尾的监控装置。
背景技术:
2.通过分析道路交通事故数据,经常会出现如下惨烈事故:某辆水泥搅拌车在前,重型自卸车在后,中间夹着一辆小型轿车,后面重型自卸车因驾驶员误操作或疲劳驾驶而失控加速,致使前后夹击的小轿车被挤压变形,车上乘员被挤扁,伤亡惨重。目前紧急制动装置aeb装车率在逐渐上升,对预防前车相撞事故率起到了很好的控制,但是对于预防来自后方车辆的主动撞击则是空白领域。因为一般驾驶员的把注意力集中在前方道路,而往往忽视来自后方车辆的突然撞击,所以一旦遇到后方高速行驶车辆的撞击,或者后方重型工程车的撞击,则显得手足无措,容易酿成车毁人亡的惨剧。
技术实现要素:
3.为了解决背景技术中存在的问题,本实用新型所提供一种基于毫米波雷达用于车辆防追尾的监控装置,有效的减少碰撞事故的发生,保护人员和财产安全。
4.本实用新型采用的技术方案是:
5.包括毫米波雷达,布置在车身后部并朝向后方,探测获得本车和后车之间的距离,并发送到车身can网络;
6.包括车身can网络,从毫米波雷达接收距离,并发送到车辆装置主控;
7.包括车辆装置主控,通过can网络接收距离,根据距离产生转向控制并发送转向控制模块;
8.包括转向控制模块,根据车辆装置主控发过来的转向控制控制车辆的方向盘进行紧急转向,以防止防追尾。
9.在车身的后部侧面安装毫米波雷达,毫米波雷达朝向后方探测本车和后车之间的纵向距离。
10.在车身四周各布置装有一个毫米波雷达。
11.所述的车辆装置主控在产生转向控制的同时产生提示报警信息并在主控台上显示,向驾驶员提醒呈现。
12.本实用新型的有益效果是:
13.本实用新型是对主动防碰撞技术的有效补充,装置主要解决了目前adas装置多关注前向防碰撞的风险而忽略了来自后方的防追尾碰撞风险的问题,特别是在被追尾车辆前方有大型车辆,后方有大型车辆进行前向碰撞的情况下,如果侧边有空间,则可以避免被追尾挤扁的恶性交通事故。
14.本实用新型有效的提高了车辆在碰撞事故将要发生时的安全性,进一步保护车内乘员的安全。
附图说明
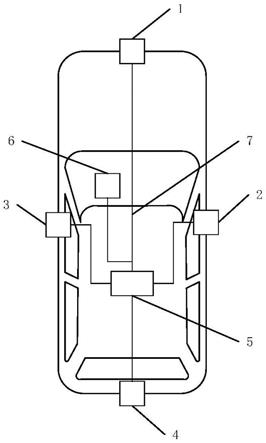
15.图1为基于毫米波雷达的紧急转向装置的装置框图俯视图;
16.图中:1-4、毫米波雷达,5、装置主控,6、转向控制模块,7、can网络。
具体实施方式
17.下面结合附图及具体实施例对本实用新型作进一步详细说明。
18.如图1所示,装置包括:
19.包括毫米波雷达1-4,布置在车身后部并朝向后方,探测获得本车和后车之间的距离,并发送到车身can网络7;
20.包括车身can网络7,从毫米波雷达1-4接收距离并发送到车辆装置主控5;
21.包括车辆装置主控5,通过can网络接收毫米波雷达采集的距离,根据距离判断出是否控制紧急转向:若距离小于阈值则控制进行安全紧急转向,产生转向控制并发送到转向控制模块6;否则不进行安全紧急转向控制。
22.包括转向控制模块6,根据车辆装置主控5发过来的转向控制信号控制车辆的方向盘进行紧急转向,以防止防追尾。
23.在车身的后部侧面毫米波雷达1-4,毫米波雷达1-4朝向后方探测本车和后车之间的纵向距离。这样防追尾装置布置在本车上,通过本车车身后方布置的毫米波雷达1探测本车和后车之间的纵向距离。
24.具体实施中可通过本车车身前方布置的毫米波雷达探测本车和前车之间的纵向距离和横向距离。纵向距离为沿行驶方向的距离,横向距离为沿垂直于行驶方向的距离。
25.本实用新型针对本车和后车在沿同一路线上前后行驶的情况,后车相对于本车靠近行驶。
26.在车身四周各布置装有一个毫米波雷达1-4。具体地,车身的前后侧以及左右两侧均布置了一个毫米波雷达1-4。如果两侧采集的距离小于预设阈值则没有可避让空间则发出报警提示,以供驾驶员自行决策避让措施。
27.更更进一步地,可以安装在车辆四周的毫米波雷达1-4识别到行人、车辆或其他障碍物,从而对周围的车况进行监控,并实时把障碍物信息数据通过can网络7发送给车辆装置主控5。
28.本实用新型的实施工作过程如下:
29.如果在某一时刻,车辆装置主控5根据车况数据发现后方将发生碰撞事故。在这种紧急情况下若驾驶员因认知延迟或操作不当而没有采取有效的措施,车辆装置主控5将会立刻根据毫米波雷达1-4得到的距离接管车辆,装置产生转向控制指令通过can网络7发送给转向控制模块6。
30.转向控制模块6根据给定的控制指令控制方向盘转角进行紧急转向避撞动作,之后后车辆装置主控5会提醒驾驶员重新接管方向盘继续正常行驶。
31.本实用新型主要针对在这种即将发生碰撞事故的紧急情况下,避免因驾驶员未注意到来自后方的撞击危险,或者通过后视镜意识到了后方的撞击风险但来不及反应的困难。该防追尾装置首先可以对这种追尾风险进行及时报警,其次对于本车前后均有大型车辆并有挤压倾向的车况,可以及时变道以规避被挤扁的事故。
32.由此,本实用新型针对目前驾驶安全装置忽视了来自后方车辆的追尾风险的问题,避免了小型车辆前后均有大型车时,由于后方车辆的猛烈撞击,而造成处于中间位置的小型车被挤扁的事故,采用了报警和紧急转向的措施减轻或规避了此类风险。
技术特征:
1.一种基于毫米波雷达用于车辆防追尾的监控装置,其特征在于:包括毫米波雷达(1-4),布置在车身后部并朝向后方,探测获得本车和后车之间的距离,并发送到车身can网络(7);包括车身can网络(7),从毫米波雷达(1-4)接收距离,并发送到车辆装置主控;包括车辆装置主控(5),通过can网络接收距离,根据距离产生转向控制并发送转向控制模块(6);包括转向控制模块(6),根据车辆装置主控(5)发过来的转向控制控制车辆的方向盘进行紧急转向,以防止防追尾。2.根据权利要求1所述的一种基于毫米波雷达用于车辆防追尾的监控装置,其特征在于:在车身的后部侧面安装毫米波雷达(1-4),毫米波雷达(1-4)朝向后方探测本车和后车之间的纵向距离。3.根据权利要求1所述的一种基于毫米波雷达用于车辆防追尾的监控装置,其特征在于:在车身四周各布置装有一个毫米波雷达(1-4)。
技术总结
本实用新型公开了一种基于毫米波雷达用于车辆防追尾的监控装置。包括毫米波雷达,布置在车身后部并朝向后方,探测获得本车和后车之间的距离,并发送到车身CAN网络;包括车身CAN网络,从毫米波雷达接收距离,并发送到车辆装置主控;包括车辆装置主控,通过CAN网络接收距离,根据距离产生转向控制并发送转向控制模块;包括转向控制模块,根据车辆装置主控发过来的转向控制控制车辆的方向盘进行紧急转向,以防止防追尾。本实用新型针对目前驾驶安全装置忽视了后方车辆追尾撞击而造成处于中间位置的小型车被挤扁的事故,采用了报警和紧急转向的措施减轻或规避了此类风险。向的措施减轻或规避了此类风险。向的措施减轻或规避了此类风险。
技术研发人员:黄利权 黄秀芳 王晗昱 孙晓龙 韩高峰
受保护的技术使用者:浙江亚太机电股份有限公司
技术研发日:2021.11.30
技术公布日:2022/5/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1