一种全独立电驱动单轴轮式车桥模块的制作方法
1.本实用新型涉及轮式车辆底盘,特别涉及轮式车辆的全独立转向驱动车桥。
背景技术:
2.一般在轮式车辆中“独立”的概念只用于悬架,即独立悬架。而转向和驱动不是“独立”的,即:左、右车轮的动力来自一个差速器的两根半轴,转矩分配是等量分配;左、右车轮的转向运动是通过转向横拉杆连接一同做偏转运动,偏转角是由转向梯形确定。
3.为提高轮式车辆的转向机动性能,可以采用全独立转向驱动车桥,即:左、右车轮的偏转分别由两个伺服电动缸作为转向器驱动,可以实现左、右车轮的逆向偏转;左、右车轮的旋转分别由两个电机及减速装置驱动,可以实现左、右车轮的反向转动。全独立转向驱动车桥在左、右车轮的逆向偏转和反向转动时,可以实现以车辆几何中心为转向中心的所谓“中心转向”,且转向阻力与仅独立驱动不独立转向的轮式底盘相比要小很多。
技术实现要素:
4.本实用新型的目的是提供一种具有独立悬架、独立转向、独立驱动等功能的全独立电驱动单轴轮式车桥模块。
5.本实用新型的目的是通过下述技术方案实现的:
6.一种全独立电驱动单轴轮式车桥模块,包括独立悬架、独立转向、独立驱动及单轴车架总成,所述独立悬架、独立转向,独立驱动安装在一个单轴车架总成上,所述单轴车架总成在前、后方向设计有接口用以用多个单轴车架总成串联成多轴轮式底盘。
7.所述左、右独立悬架均采用不等长双横臂式导向机构,包括上横臂、下横臂、转向节、车轮总成、和弹簧减振器组总成。
8.所述左、右独立转向均采用48v伺服电动缸作为转向器分别驱动左、右车轮偏转。
9.所述左、右独立驱动均采用48v永磁同步电机及减速装置分别驱动左、右车轮旋转,采用4块12v蓄电池串联作为48v电源供电。
10.本实用新型的有益效果:本实用新型技术方案与现有技术相比,具有如下特点:
11.(1)同时采用独立驱动和独立转向,可以同时实现左、右车轮的反向转动和左、右车轮的逆向偏转,由于左、右车轮的逆向偏转可以对车身形成所谓的“向心偏转”,因而大大减小了车辆在进行中心转向时的转向阻力;具有良好的动力性、平顺性和转向机动性。
12.(2)单轴车架总成符合模块化设计理念,可作为基本单元用于构建模块化多轴轮式车辆底盘,在单轴车架总成的前、后方向设计有接口,可以根据工程实际需要,方便地采用多个单轴车架总成串联拼接成双轴4轮、三轴6轮、四轴8轮、五轴10轮、
……
、等多种多轴轮式底盘。
附图说明
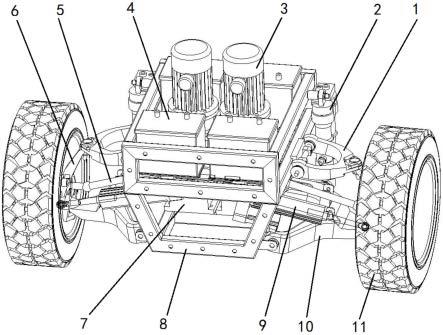
13.图1-本实用新型实施例的结构简图;
14.图2-独立悬架系统三维模型图;
15.图3-独立驱动系统三维模型图;
16.图4-独立转向伺服电动缸装车实物图;
17.图5-单轴车架总成的三维模型;
18.图6-由4个单轴车架总成串联拼接成的多轴底盘三维模型图。
19.其中:
20.1.悬架上横臂2.弹簧减振器组总成3.永磁同步电机4.12v蓄电池5.车轮半轴6. 转向节与车轮总成7.齿轮减速装置8.单轴车架总成9.转向伺服电动缸10.悬架下横臂。
具体实施方式
21.下面结合附图和实施例对本实用新型作进一步说明:
22.如图1所示,本实用新型一种全独立电驱动单轴轮式车桥模块包括独立悬架、独立转向、独立驱动及单轴车架总成8,左、右独立悬架均采用不等长双横臂式导向机构,包括:上横臂1、下横臂10、转向节6、车轮总成11和弹簧减振器组总成2。
23.左、右独立转向均采用48v伺服电动缸9作为转向器分别驱动左、右车轮偏转。
24.左、右独立驱动均采用48v永磁同步电机3及减速装置7分别驱动左、右车轮旋转,采用4块12v蓄电池4串联作为48v电源供电。
25.独立悬架、独立转向,独立驱动三部分结构安装在一个单轴车架总成8上,单轴车架总成在前、后方向设计有接口,采用多个单轴车架总成串联成多轴轮式底盘。
26.如图2所示,左、右独立悬架采用不等长双横臂式导向机构的三维模型。为保证悬架导向机构的性能和可靠性,全部采用轻型越野车产品的悬架套件,再配以弹簧减振器组总成。
27.如图3所示,独立转向伺服电动缸与车架总成8采用关节轴承91连接,独立转向伺服电动缸与转向节6采用球头销92相连接,为获得伺服电动缸的行程数据,在伺服电动缸的上方并联安装有拉杆式位移传感器。
28.如图4所示,左、右独立驱动采用的永磁同步电机及减速装置的三维模型。为保证电驱动系统性能和可靠性,全部采用市场中成熟的机电产品。
29.如图5所示,单轴车架总成的三维模型。本图中可以看到单轴车架总成在前、后方向设计有多个安装接口连接螺栓的螺栓孔。
30.如图6所示,采用4个单轴车架总成串联拼接成的四轴8轮底盘的三维模型。
31.经试验验证本实用新型实施例的工程产品工作正常,适用于轴荷不大于1吨的轮式车桥。采用本实用新型构建的四轴8轮底盘可以在“向心偏转”状态下执行中心转向。
32.综上所述,以上仅为本实用新型的实施方式,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种全独立电驱动单轴轮式车桥模块,其特征在于:包括独立悬架、独立转向、独立驱动及单轴车架总成(8),所述独立悬架、独立转向,独立驱动安装在一个单轴车架总成(8)上,所述单轴车架总成(8)在前、后方向设计有接口用以用多个单轴车架总成串联成多轴轮式底盘。2.如权利要求1所述全独立电驱动单轴轮式车桥模块,其特征在于:所述左、右独立悬架均采用不等长双横臂式导向机构,包括上横臂(1)、下横臂(10)、转向节(6)、车轮总成(11)、和弹簧减振器组总成(2)。3.如权利要求1所述全独立电驱动单轴轮式车桥模块,其特征在于:所述左、右独立转向均采用48v伺服电动缸(9)作为转向器分别驱动左、右车轮偏转。4.如权利要求1所述全独立电驱动单轴轮式车桥模块,其特征在于:所述左、右独立驱动均采用48v永磁同步电机(3)及减速装置(7)分别驱动左、右车轮旋转,采用4块12v蓄电池(4)串联作为48v电源供电。
技术总结
本实用新型提供了一种全独立电驱动单轴轮式车桥模块,包括独立悬架、独立转向、独立驱动及单轴车架总成,所述独立悬架、独立转向,独立驱动安装在一个单轴车架总成上,所述单轴车架总成在前、后方向设计有接口用以用多个单轴车架总成串联成多轴轮式底盘。本实用新型同时采用独立驱动和独立转向,可以同时实现左、右车轮的反向转动和左、右车轮的逆向偏转,由于左、右车轮的逆向偏转可以对车身形成所谓的“向心偏转”,因而大大减小了车辆在进行中心转向时的转向阻力;具有良好的动力性、平顺性和转向机动性。转向机动性。转向机动性。
技术研发人员:吴志成 刘晓静
受保护的技术使用者:苏州堪瑞傲科技有限公司
技术研发日:2021.12.31
技术公布日:2022/9/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1