爬壁机器人的塔筒横焊缝防吸合机构的制作方法
1.本实用新型涉及一种机器人的组成机构,具体地说是一种爬壁机器人的塔筒横焊缝防吸合机构。
背景技术:
2.在清洗风机塔筒等立柱型作业面上使用的爬壁机器人,一般是在爬壁机器人的机架上布设有由若干强磁铁排布组成的磁吸盘,通过磁吸盘对塔筒的磁力吸附作用,以保持爬壁机器人的贴壁功能。由于爬壁机器人自身以及载荷的重量较大,因此,磁吸盘需要具有很大的磁吸力。而为了保证爬壁机器人在塔筒上的顺利爬行,机架上的磁吸盘必须要与塔筒之间保持一定的间隙,不能贴合。一旦有磁吸盘上的某个或某几个强磁铁与塔筒表面贴合在一起,就会因强磁吸力而阻滞住爬壁机器人的上下爬行。这时就必须从高空的塔顶吊下维修人员进行拆分操作,不仅十分危险,而且单人还很难拆分。磁吸盘的吸合面与塔筒表面之间必须设置合理的间距。如果间距过大,就会降低磁吸盘对塔筒的吸合力,相应出现机器人坠滑或坠落的误动作。即使间距合理,也会使爬壁机器人在经过塔筒上的焊缝时,使磁吸盘与外凸于塔筒表面的焊缝相吸合,从而造成爬壁机器人出现吸停事故。
技术实现要素:
3.本实用新型的目的就是提供一种爬壁机器人的塔筒横焊缝防吸合机构,以解决爬壁机器人上的磁吸盘在经过塔筒横焊缝时容易出现吸停事故的问题。
4.本实用新型是这样实现的:一种爬壁机器人的塔筒横焊缝防吸合机构,包括:
5.滚轮支架,固定在爬壁机器人的机架上,其安装位置位于机架上的磁吸盘的前、后端;以及
6.滚轮,安装在所述滚轮支架上,滚轮的轮面下突缘突出于磁吸盘的吸合作用面,以对机架和磁吸盘形成平面支撑,使磁吸盘的吸合作用面与塔筒作业面保持非接触间隙。
7.所述滚轮的轴心线与所述机架的长向相垂直,所述滚轮的轮面下突缘与磁吸盘的吸合作用面相平行。
8.所述滚轮支架有四个,两两一组,分列在磁吸盘的前、后端的机架上。
9.安装本实用新型后,可使前后四个滚轮对机架和磁吸盘形成了一个平面支撑抬起,使磁吸盘的吸合作用面与塔筒作业面之间始终能够保持一个非接触间距,该间距既满足磁吸盘的吸合作用面与塔筒作业面之间的磁吸作用间距,同时还大于塔筒表面焊缝的突出高度,从而有效避免了爬壁机器人在经过塔筒上的横焊缝时极易出现的吸停事故,保障了爬壁机器人清洗风机塔筒作业的顺利完成。
附图说明
10.图1是安装本实用新型后的爬壁机器人的局部结构示意图。
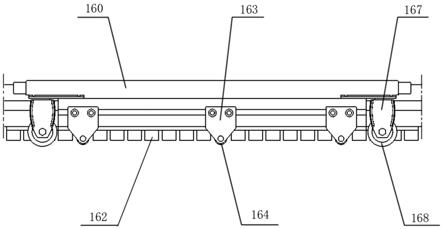
11.图2是图1的仰视图。
具体实施方式
12.如图1、图2所示,本实用新型包括四个滚轮支架167和四个滚轮168,四个滚轮支架167两两一组,固定在磁吸盘162前、后端的机架160上,滚轮168安装在滚轮支架167上,滚轮168的轴心线与机架160的长向相垂直,滚轮168的轮面下突缘与磁吸盘162的吸合作用面相平行。
13.滚轮168的轮面为圆柱形轮面,其下突缘突出于磁吸盘162的吸合作用面,四个滚轮168即可对机架160和磁吸盘162形成一个平面支撑,使磁吸盘162的吸合作用面与塔筒作业面能够始终保持一个非接触式间隙。
14.当然也可设计一个能安装两个滚轮的滚轮支架167,将其安装在磁吸盘162的前端或后端的机架160上,作用就可减少滚轮支架167的配置数量。滚轮168与滚轮支架167还可采用万向轮等其他多种形式。
15.在图1、图2中的机架160上还设置有由滚轴支架163和滚轴164所组成的塔筒纵焊缝防吸合机构,用于对通过风机塔筒上的纵焊缝进行有效防范。另外,在机架160上还设置有用于对机架160的中心杆架161上所安装的端部强磁铁169实施防吸合支撑的滚珠支撑组件165。
技术特征:
1.一种爬壁机器人的塔筒横焊缝防吸合机构,其特征是,包括:滚轮支架,固定在爬壁机器人的机架上,其安装位置位于机架上的磁吸盘的前、后端;以及滚轮,安装在所述滚轮支架上,滚轮的轮面下突缘突出于磁吸盘的吸合作用面,以对机架和磁吸盘形成平面支撑,使磁吸盘的吸合作用面与塔筒作业面保持非接触间隙。2.根据权利要求1所述的爬壁机器人的塔筒横焊缝防吸合机构,其特征是,所述滚轮的轴心线与所述机架的长向相垂直,所述滚轮的轮面下突缘与磁吸盘的吸合作用面相平行。3.根据权利要求1所述的爬壁机器人的塔筒横焊缝防吸合机构,其特征是,所述滚轮支架有四个,两两一组,分列在磁吸盘的前、后端的机架上。
技术总结
本实用新型涉及一种爬壁机器人的塔筒横焊缝防吸合机构,其结构包括滚轮支架和滚轮;所述滚轮支架有两个,相对固定在爬壁机器人上的设置磁吸盘的机架的两侧;所述滚轮是由非铁磁性材料制成,其两端分别轴接在所述滚轮支架上,其轴体没入磁吸盘的高度区域内,其轴面的下突缘突出于磁吸盘的吸合作用面。安装本实用新型后,可使前后四个滚轮对机架和磁吸盘形成了一个平面支撑抬起,使磁吸盘的吸合作用面与塔筒作业面之间始终能够保持一个非接触间距,从而有效避免了爬壁机器人在经过塔筒上的横焊缝时极易出现的吸停事故,保障了爬壁机器人清洗风机塔筒作业的顺利完成。清洗风机塔筒作业的顺利完成。清洗风机塔筒作业的顺利完成。
技术研发人员:温广胜 温家辉
受保护的技术使用者:温广胜
技术研发日:2020.09.02
技术公布日:2022/2/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1