一种无人直升机用应急电源系统
1.本发明涉及无人直升机技术领域,具体的说涉及一种无人直升机用应急电源系统。
技术背景
2.无人直升机具有垂直起降和空中悬停等飞行特性,在农业、电力、交通等方面发挥着重要的作用。尤其是近几年随着动力储能系统、传感器、飞行控制技术的发展,无人直升机得到了迅速的发展。无人直升机在飞行过程中在主电源系统不能正常输出电能时,必须依靠机载应急电源为飞行控制系统、测控设备等关键用电设备供电,以确保飞行安全和尽快返航。锂离子电池以其高能量密度、无记忆效应等优点,在无人直升机应急电源系统中得到越来越广泛的应用。
3.专利cn203491696u公开了无人直升机在正常情况下,无人直升机上的主电源电压为28.5v和12v,应急电源至少包括一块24v蓄电池组或12v蓄电池组。当主电源故障时,应急电源保证影响飞行安全的直流基本负载正常工作,从而确保30min应急飞行时间。
4.现存无人直升机应急电源系统,多采用将电池管理系统集成在电池组内部,将电池充电系统独立出来单独作为一个模块进行设计。这样就导致电池管理系统的电池组和电池充电系统都具有单独的外壳,增加了应急电源系统的重量。另外,电池管理系统与电池充电系统具有充电控制信号线、充电功率线等多种连接线,维护时容易出现接插件插错、损坏等问题,增加了系统的故障率。
技术实现要素:
5.本发明基于以上问题,提出了一种将电池充电模块、电池管理系统模块与锂电池组集成为一体的小体积、轻重量、稳定性能好的集成式无人直升机用应急电源系统。
6.该系统包含锂电池组、电池管理系统模块和电池充电模块三个部分:锂电池组为整个系统的能量储存中枢,其包含锂电池、保险丝、霍尔传感器、温度传感器和检测线:其中锂电池采用6节高倍率三元锂离子电池串联而成,电池组充满电时电压为25.2v,电池容量可以保证电池在充满电时至少可以保证无人直升机飞行30min;保险丝串联在锂电池组总正的输出端,在电池充放电电路发生故障时,保险丝作为最后一道保险可以防止发生危险。霍尔传感器采用双量程输出霍尔组成,可以将充电电流和放电电流分开检测,保证电池电流的检测精度。温度传感器采用ntc温度传感器,根据ntc阻值的变化,监测电池充放电过程中的实时温度值。检测线在每一节电池的正负端引出检测电池的单体电压,并且在电池不均衡时通过检测线对电池进行均衡。
7.电池管理系统模块负责检测电池的单体电压、总电压、充放电电流、温度等电池工作状态,并经过数据处理后对电池的soc/soh参数进行估计,根据电池工作状态控制电池充电、均衡等动作,其包含信息采集单元、电池均衡单元、供电单元、通讯故障报警单元、cpu单元和充电使能控制电路:信息采集单元采用ltc6811作为核心检测器件,利用其电压检测端
口检测锂电池组的单体电压;电池总电压、温度、电流等信号经电阻分压和运算放大器放大后输入至电池电压检测芯片的通用电压检测端口gpiox,经内部ad采集后和电池单体电压一起发送给cpu单元;电池均衡单元采用被动均衡的方式,确保电池之间的电压均衡,其与信息采集单元集成在一起,包括受电池检测芯片控制的s脚、放电电阻和放电开关;供电单元为整个电池管理系统模块供电,其包括输入滤波电路、隔离电源模块和输出滤波电路;通讯故障报警单元包含通讯芯片电路和故障报警电路,通讯芯片电路负责与无人直升机上位机进行通讯,故障报警电路通过高低电平的方式发送至无人直升机上位机;cpu单元是整个电池管理系统模块的控制核心,所有的信息汇聚到cpu单元进行计算处理后,再发送到相对应的执行单元,cpu单元包含cpu芯片、看门狗电路、晶振电路和下载电路,负责接收信息采集单元采集得到的数据并进行数据处理,对电池的剩余容量(soc)进行估算,在电池满足充电条件时向充电控制单元发送使能信号,在电池满足均衡条件时向电池均衡单元发送均衡信号,在电池发生过冲、过流、过温等故障报警信息时通讯故障报警电路发送故障信号;充电使能控制电路控制充电模块是否对电池进行充电,其包含充电使能电路和输出使能电路两部分。
8.电池充电模块将无人直升机母线输入的直流电压源转换为稳定的恒流限压源为电池进行充电,电池充电模块包括输入滤波单元、dc/dc电源单元、使能单元、输出滤波单元、硬件保护功率单元和硬件保护控制单元:其中输入滤波电路具有双向隔离作用,可以抑制无人直升机母线上的干扰信号,同时也防止开关电源工作时产生的谐波和电磁干扰信号影响无人直升机母线。dc/dc电源模块电路采用高效率的电源模块将无人直升机母线直流电压源转换为恒流限压电源为无人直升机应急电源锂电池进行充电。输出滤波电路采用
ᴨ
型lc滤波电路,利用电感对交流信号的高阻抗和电容对交流信号的低阻抗,有效滤除电源模块输出电源中的交流成分。硬件保护功率电路由低导通压降二极管和低导通阻抗mos管及其驱动电路组成,二极管防止电池充电系统反向充电,mos管及其驱动电路组成充电回路的控制开关,在不满足充电条件时断开充电回路。充电使能电路采用光耦隔离的方式与电池管理系统隔离,当满足充电条件时,电池管理系统通过控制光耦导通使能充电模块。硬件保护控制电路包含硬件电压保护电路和输出控制电路两个部分,两部分的输出信号经与非门合并后控制硬件保护功率电路:输出控制电路与充电使能电路类似,当满足电池充电条件后,使能输出控制电路;硬件电压保护电路采用分压电路实时与参考电压进行比较,当输出电压高于硬件保护时输出低电平,关闭硬件保护功率电路,断开充电回路保护电池的安全。
9.本发明与现有技术相比的优点在于:(1)本发明针对现有无人直升机应急电源系统分立式、重量重、维护复杂的问题提出了一种将电池充电模块、电池管理系统模块与锂电池组集成为一体的小体积、轻重量、稳定性能好的集成式无人直升机用应急电源系统。
10.(2)针对无人直升机对于充电系统重量非常敏感的特征,本发明采用转换效率高达96%的电源模块、低导通阻抗的mos管和低导通压降的二极管,尽最大可能降低充电模块的发热量,从而减少散热面积,进而减轻充电模块的重量。
11.(3)为了确保机上充电的安全性,本充电系统采用了三级充电保护。第一级为充电使能电路,只有在电池管理系统使能的情况下,电源模块才会开始进行电源转换;第二
级为输出控制电路,只有在输出电压满足要求的情况下,才会使能输出控制电路,从而使充电电路导通;第三级为硬件电压保护电路,当电源模块输出电压高于保护电压时,硬件电压保护电路会强制关闭pmos管,从而关闭充电回路。三级充电保护可以在任何一级保护失效时,保证电池充电系统不会失效,从而从概率上大大的降低电池过充的概率,保护电池的安全性。
附图说明
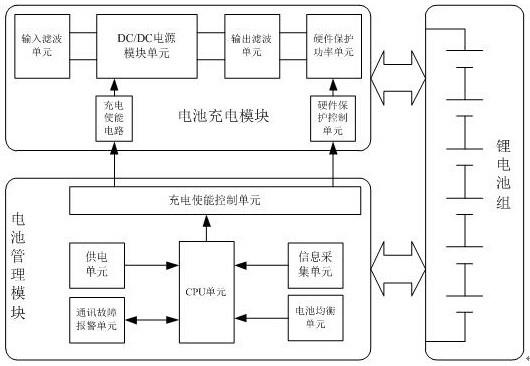
12.图1 本发明实例总体框图;图2 本发明实例锂电池组示意图;图3 本发明实例电池管理系统模块示意图;图4 本发明实例充电模块示意图;图5 本发明实例工作流程图。
具体实施方式
13.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有实施例,都属于本发明保护的范围。
14.如图1所示,无人直升机用应急电源系统包含锂电池组、电池管理系统模块和电池充电模块三个部门。锂电池组是应急电源系统的能量核心,采用6节三元锂离子电池串联,在主电源系统不能正常输出电能时,向外部提供额定24v的应急电源。电池管理系统模块负责检测锂电池组的电压、电流、温度等实时工作状态,对电池的剩余容量进行估算,并根据锂电池组的状态参数控制锂电池组的充电和均衡等动作。电池充电模块负责将无人直升机母线的恒压源转换成恒流限压源为锂电池组进行充电,其包括输入滤波单元、dc/dc电源模块单元、输出滤波单元、硬件保护功率单元、充电使能单元和硬件保护控制单元。
15.如图2所示,锂电池组为整个应急电源系统的能量核心,在主电源系统不能正常输出电能时,向外部提供额定24v的应急电源,保证影响无人直升机安全的直流基本负载正常工作,从而确保无人直升机的应急飞行时间。锂电池组由三元锂离子电池、保险丝、霍尔传感器、温度传感器和检测线组成。锂离子电池采用6节高倍率三元锂离子电池串联而成,电池组充满电时电压为25.2v,电池容量可以保证电池在充满电时至少可以保证无人直升机飞行30min。保险丝串联在锂电池组总正的输出端,在电池充放电电路发生故障时,保险丝作为最后一道保险可以防止发生危险。霍尔传感器采用双量程输出霍尔组成,可以将充电电流和放电电流分开检测,保证电池电流的检测精度。温度传感器采用ntc温度传感器,根据ntc阻值的变化,监测电池充放电过程中的实时温度值。检测线在每一节电池的正负端引出检测电池的单体电压,并且在电池不均衡时通过检测线对电池进行均衡。
16.如图3所示,电池管理系统模块为应急电源系统的控制中枢,负责检测锂电池组的电压、电流、温度等实时工作状态,对电池的剩余容量进行估算,并根据锂电池组的状态参数控制锂电池组的充电和均衡等动作。电池管理系统模块包含信息采集单元、电池均衡单元、供电单元、通讯故障报警单元、cpu单元和充电使能控制电路。
17.信息采集单元采用ltc6811作为核心检测器件,其测量电池电压范围为0-5v,测量误差小于1.2mv是目前市场上成熟的电池检测芯片:利用其电压检测端口检测锂电池组的单体电压;电池总电压经电阻分压和运算放大器放大后输入至电池电压检测芯片的通用电压检测端口gpiox,经内部ad采集后和电池单体电压一起发送给cpu单元;同理电池的温度、电流等信息经分压、放大、数据采集后发送至cpu单元。
18.电池均衡单元采用被动均衡的方式,确保电池之间的电压均衡,其与信息采集单元集成在一起,包括电池检测芯片、放电电阻和放电开关,当电池单体之间压差较大时,电池检测芯片控制相对应放电开关闭合,高电压电池开始放电,直到电池单体之间压差满足要求之后停止放电均衡。
19.供电单元为整个电池管理系统模块供电,其负责将无人直升机母线上的波动的电压源变换成稳定的直流电压源供模块内部单元正常工作,其包括输入滤波电路、隔离电源模块和输出滤波电路。
20.通讯故障报警单元包含通讯芯片电路和故障报警电路,通讯芯片电路负责与无人直升机上位机进行通讯,将电池的剩余容量、故障报警信息等发送至无人直升机;故障报警电路在电池发生过充、过温、过流等故障信息时,通过高低电平的方式发送至无人直升机上位机。
21.cpu单元是整个电池管理系统模块的控制核心,所有的信息汇聚到cpu单元进行计算处理后,再发送到相对应的执行单元。cpu单元包含cpu芯片、看门狗电路、晶振电路和下载电路,负责接收信息采集单元采集得到的数据并进行数据处理,对电池的剩余容量(soc)进行估算,在电池满足充电条件时向充电控制单元发送使能信号,在电池满足均衡条件时向电池均衡单元发送均衡信号,在电池发生过冲、过流、过温等故障报警信息时通讯故障报警电路发送故障信号。
22.充电使能控制电路控制充电模块是否对电池进行充电,其包含充电使能电路和输出使能电路两部分。在满足充电条件时,cpu单元向通过充电使能电路向电池充电模块发送充电使能信号,使充电模块开始进行电源变换,待充电模块输出电压稳定后cpu单元通过输出使能电路闭合充电回路,开始对电池进行充电。当电池充满电或发生故障报警时,cpu单元先控制输出使能电路断开充电回路,然后控制充电使能电路无效,使充电模块停止工作。
23.如图4所示电池充电模块将无人直升机母线输入的直流电压源转换为稳定的恒流限压源为电池进行充电。电池充电模块包括输入滤波单元、dc/dc电源单元、使能单元、输出滤波单元、硬件保护功率单元和硬件保护控制单元。
24.输入滤波单元具有双向隔离作用,可以抑制无人直升机母线上的干扰信号,同时也防止电源模块工作时产生的谐波和电磁干扰信号影响无人直升机母线。输入滤波电路包含tvs二极管、滤波电容cap1、共模电感cm1和滤波电容cap2。
25.dc/dc电源单元将无人直升机母线输入的直流电压源转换为稳定的恒流限压电源,从而为无人直升机应急电源锂电池进行充电。dc/dc电源模块采用synqor公司非隔离型buck-boost电源模块,该电源模块可以将恒压电源转换为恒流限压电源。该电源模块采用同步整流技术可以有效的提高电源模块的转换效率,其最高转换效率高达96%,可有有效减少充电模块的发热量,减少散热片的面积,进而减轻充电系统的重量。
26.输出滤波单元可以有效滤除电源模块输出电源中的交流成分,防止交流信号对负
载产生电磁干扰等不良影响。输出滤波电路采用
ᴨ
型lc滤波电路,该电路由cap3、l1和cap4组成。
27.所述硬件保护功率单元包含防反向充电二极管diode和由pmos管及其驱动电路组成的充电开关。防反向充电二极管diode选择低导通阻抗功率二极管,可以对电流的流动方向进行控制防止电池反向充电对电路内部器件造成损坏。pmos、r1、r2和oc2组成充电回路的开关,当光耦oc2正常导通时,输出电压v
bus+
经电阻r1与r2分压后,会在pmos的gs间形成压差,使pmos导通,充电回路导通;当光耦oc2关闭时,pmos关闭,充电回路断开。为了降低充电系统的发热量,pmos管选择低导通阻抗的功率mos管。
28.充电使能单元控制dc/dc电源单元是否工作,当外部控制电路有效时(en+与en-存在压差),光耦oc1工作,dc/dc电源模块的enable脚被拉低,dc/dc电源模块工作。当电池充满或者不满足充电要求时,外部控制电路无效,光耦oc1截止,dc/dc电源模块的enable脚悬空,电源模块停止工作。
29.硬件保护控制单元包含硬件电压保护电路和输出控制电路两个部分,两部分的输出信号经与非门nand后控制硬件保护功率电路的导通与关断。其中硬件电压保护电路包括分压电路和比较电路,在输出电压低于硬件保护电压的情况下,v
bus+
经电阻r7和r8分压后得到的电压低于电压v
ref
,在经过比较器comp比较后,输出高电平作为与非门nand一个的输入信号,在输出控制电路有效的情况下,与非门nand输出低电平,光耦oc2导通,从而控制输出pmos导通。反之当v
bus+
高于给定电压时,光耦oc2关闭,从而控制输出pmos关断。输出控制电路用光耦将控制的弱电信号与充电部分进行电气隔离,当输出控制电路有效(即outctrl+与outctrl-之间存在压差)时,光耦oc3导通,输出高电平至与非门nand,在硬件电压保护电路输出高电平时,与非门nand输出低电平,使光耦oc2导通从而控制硬件保护功率电路中的pmos导通。反之当输出控制电路无效(即outctrl+与outctrl-之间无压差)时,pmos关断,断开输出回路。可以看出只有在硬件电压保护电路和输出控制电路同时输出高电平时才可以使硬件电压保护功率电路导通,任何一个信号为低电平,就关断充电回路。
30.一种无人直升机用应急电源的工作流程图如图5所示。在实际工作中,锂电池组是整个系统的中枢,电池充电模块和电池管理系统模块都是为了保证锂电池组的安全可靠的工作服务的。电池管理系统模块是整个应急电源系统的控制核心,负责采集锂电池组的工作状态信息,并根据电池信息控制充电、均衡等动作。电池充电模块在电池管理系统模块发送充电信息时在机上位电池进行充电。其工作流程为在无人直升机发动机启动母线供电后;电池管理系统模块开始上电工作;信息采集单元采集电池的单体电压、电池总电压、充放电电流、温度等信息;根据电池的工作状态信息计算电池的soc值;通讯与故障报警单元将电池状态信息发送至无人直升机上位机;在电池需要均衡时,控制均衡电路进行被动均衡放电;在电池需要充电时控制充电使能电路有效;电源模块开始工作进行电源变换;延时3s等待电源模块输出电压稳定后;控制输出使能电路有效,闭合充电回路;开始对电池进行恒流限压充电;在充电过程中如果出现硬件电压保护,直接切断充电回路停止充电;在电池充满或出现故障报警时,控制输出使能电路无效,切断充电回路;控制充电使能电路无效,充电模块停止工作。
31.本发明专利与现有技术相比的优点在于:(1)本发明针对现有无人直升机应急电源系统分立式、重量重、维护复杂的问题提出了
一种将电池充电模块、电池管理系统模块与锂电池组集成为一体的小体积、轻重量、稳定性能好的集成式无人直升机用应急电源系统。
32.(2)针对无人直升机对于充电系统重量非常敏感的特征,本发明采用转换效率高达96%的电源模块、低导通阻抗的mos管和低导通压降的二极管,尽最大可能降低充电模块的发热量,从而减少散热面积,进而减轻充电模块的重量。
33.(3)为了确保机上充电的安全性,本充电系统采用了三级充电保护。第一级为充电使能电路,只有在电池管理系统使能的情况下,电源模块才会开始进行电源转换;第二级为输出控制电路,只有在输出电压满足要求的情况下,才会使能输出控制电路,从而使充电电路导通;第三级为硬件电压保护电路,当电源模块输出电压高于保护电压时,硬件电压保护电路会强制关闭pmos管,从而关闭充电回路。三级充电保护可以在任何一级保护失效时,保证电池充电系统不会失效,从而从概率上大大的降低电池过充的概率,保护电池的安全性。
34.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有实施例,都属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1