一种全动式机翼飞行器的飞行操控方法与流程
1.本发明属于全动式机翼飞行器领域,尤其涉及一种全动式机翼飞行器的飞行操控方法。
背景技术:
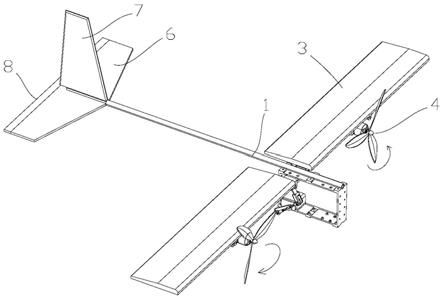
2.所述全动式机翼飞行器(简称飞行器),又称全动式倾转翼飞机,其结构包括机身1,机身1内设有机翼驱动机构,机身1上水平横穿有与机翼驱动机构连接的转轴2,机身1的两侧均设有机翼3,转轴2的端部通过旋转机构连接机翼3,旋转机构上设有螺旋桨4,螺旋桨4始终位于机翼3的前侧,机翼驱动机构可通过转轴2带动机翼3绕转轴2旋转,旋转机构可带动机翼3旋转,从而机翼3可实现万向转动;机翼3的后侧具有可转动的副翼5,机身1的后侧设有水平尾翼6,水平尾翼6的顶部设有垂直尾翼7,水平尾翼6的后侧设有转动连接的升降舵8(自带有升降舵控制系统),升降舵8用于改变飞行器的俯仰飞行状态,水平尾翼6和垂直尾翼7上均设有尾浆9,机身1内设有机翼控制系统、副翼控制系统和尾浆控制系统构成,机翼控制系统控制机翼3的旋转,副翼控制系统控制副翼5旋转,尾浆控制系统控制尾浆9转动速度。飞行器的飞行姿态,包括平飞状态和悬停状态。
3.现有的飞行器的飞行操控方法,包括操控平飞状态下的飞行器进行翻滚动作,操控悬停状态下的飞行器的前进、后退和转向,
4.飞行器处于平飞状态时,机翼3保持水平状态且长向垂直于机身1,副翼5平行于机翼3。当操控飞行器侧向翻滚时,如图7所示,通过副翼控制系统使两个副翼5分别向上和向下转动,与机翼3之间产生夹角,从而使螺旋桨4产生的下洗气流在两个副翼5上产生不同方向的力,从而产生翻滚力矩,使飞行器翻滚,但是相应的副翼5导致下洗气流速度变慢,对飞行器的推力减小,使得螺旋桨4必须增加很多的功率以维持原有的飞行速度,由此导致飞行器续航能力较差。此外,当飞行器高速平飞时,还可能造成“副翼反效”,飞行器无法操纵。
5.飞行器处于悬停状态时,机翼3保持竖直状态且长向垂直于机身1。操控飞行器转向时,如图8所示,通过副翼控制系统使两个副翼5分别前后侧转动,从而使螺旋桨4的下洗气流,在两个副翼5上产生方向不同的分力,从而产生第一个扭力,同时尾浆控制系统控制水平尾翼6上的尾浆9改变转速,从而产生第二个扭力,这两个扭力作用下,飞行器发生转向。由于副翼5倾斜阻碍了下洗气流的流动,使得下洗气流速度降低,飞行器的升力降低,从而需要提高螺旋桨4的转速,以维持飞行器的悬停状态,从而导致飞行器的续航时间减少。
6.操控飞行器前进或后退时,是通过尾浆控制系统改变水平尾翼6上的尾浆9的转速,尾浆9升力改变,飞行器的后端上升或下降,飞行器与地面产生夹角,飞行器处于俯冲或仰起状态,从而螺旋桨4的下洗气流与地面之间也产生夹角,产生水平向的推动分力,推动飞行器前进或后退。但是这也导致飞行器保持悬停的推力减小,于是必须加快螺旋桨4的转速以维持飞行器的悬停状态,飞行器功率增加,续航时间减少。此外,悬停状态下机翼3的迎风面大,使得飞行器前进和后退的阻力大,也导致飞行器的续航时间减少,并且在大风天气下,机翼3受风力影响大,难以维持飞行器的稳定性。
7.现有飞行器的操控方法的实现要求飞行器具备尾浆9、副翼5、副翼控制系统和尾浆控制系统,零件数量多,导致飞行器的总重量大,从而续航能力差;并且副翼控制系统和尾浆控制系统的结构都非常复杂,导致飞行器容易出现故障。
8.综上所述,采用现有飞行操控方法的飞行器存在续航能力差、会产生副翼反效、稳定性差和容易出现故障的缺陷。
技术实现要素:
9.本发明的目的在于,提供一种全动式机翼飞行器的飞行操控方法。采用本发明的飞行器具有续航能力好、不会产生副翼反效、稳定性好和不容易出现故障的优点。
10.本发明的技术方案:一种全动式机翼飞行器的飞行操控方法,对飞行器的以下动作进行操控,
11.侧向翻滚:将飞行器保持在平飞状态,通过调节两个机翼3在的竖直向上的夹角实现飞行器的侧向翻滚;
12.转向:将飞行器保持在悬停状态,通过将调节机翼3与机身1之间的夹角实现飞行器的转向;
13.低速向前飞行:将飞行器保持在悬停状态,将两个机翼3的前端向内侧靠拢,实现飞行器的低速向前飞行;
14.低速向后飞行:将飞行器保持在悬停状态,将两个机翼3的后端向内侧靠拢,实现飞行器的低速向后飞行。
15.前述的全动式机翼飞行器的飞行操控方法中,所述侧向翻滚,是将飞行器保持在平飞状态,通过偏转飞行器的右侧机翼3,使右侧机翼3内侧端向上翘起,实现飞行器的的向右翻滚;通过偏转左侧机翼3,使左侧机翼3的内侧端向上翘起,实现飞行器的的向左翻滚。
16.前述的全动式机翼飞行器的飞行操控方法中,所述侧向翻滚中,通过改变右侧机翼3的偏转角度改变飞行器向右翻滚的角加速度;通过改变左侧机翼3的偏转角度改变飞行器向左翻滚的角加速度。
17.前述的全动式机翼飞行器的飞行操控方法中,所述转向,是将飞行器保持在悬停状态,将两个机翼3的前侧端同步向左偏转,实现飞行器的左转;将两个机翼3的前侧端同步向右旋转,实现飞行器的右转。
18.前述的全动式机翼飞行器的飞行操控方法中,所述转向中,通过改变两个机翼3向左偏转的角度改变飞行器左转的角加速度;通过改变两个机翼3向右偏转的角度改变飞行器右转的角加速度。
19.前述的全动式机翼飞行器的飞行操控方法中,所述低速向前飞行,是将飞行器保持在悬停状态,将两个机翼3的前端内侧靠拢,并保持两个机翼3关于机身1镜像分布,实现飞行器的低速向前飞行。
20.前述的全动式机翼飞行器的飞行操控方法中,所述低速向前飞行中,通过改变两个机翼3之间的夹角,改变飞行器的飞行角加速度。
21.前述的全动式机翼飞行器的飞行操控方法中,所述低速向后飞行,是将飞行器保持在悬停状态,将两个机翼3的后端同步向内侧靠拢,并保持两个机翼3关于机身1镜像分布,实现飞行器的低速向后飞行。
22.前述的全动式机翼飞行器的飞行操控方法中,所述低速向后飞行中,通过改变两个机翼3之间的夹角,改变飞行器的飞行角加速度。
23.与现有技术相比,本发明通过转动机翼使两个机翼在机翼长向上产生夹角,从而两个机翼之间的升力不同,产生扭力,使平飞状态下的飞行器进行翻滚,在此过程中,副翼维持与机翼的平行状态,螺旋桨的下洗气流速度不变,飞行器的推力基本没有改变,从而不需要增加很多的功率以维持原有的飞行速度,从而飞行器的续航能力得以提高,由于翻滚动作没有用到副翼,副翼在翻滚过程中继续保持与机翼平行,飞行器高速飞行时,也不会产生“副翼反效”,飞行器的操纵性得以保证。
24.本发明通过转动机翼,使机翼长向上与机身之间的具有夹角,从而使螺旋桨产生的下洗气流总体上偏向一侧,从而使下洗气流推动机翼的推力与机身之间具有夹角,从而推动悬停状态下的飞行器转向。由于转向动作没有使用到副翼,副翼维持与机翼的平行状态,螺旋桨的下洗气流速度不变,飞行器的推力基本没有改变,从而不需要增加很多的功率以维持原有的飞行速度,从而飞行器的续航能力得以提高。
25.本发明通过改变悬停状态下的飞行器的两个机翼之间的夹角,使得螺旋桨的下洗气流前后强度不同,从而使飞行器前后侧的推动力不同,使飞行器低速前进或后退。在此过程中,无人机保持水平状态,升力没有发生变化,不需要加快螺旋桨的转速以维持飞行器的悬停状态,飞行器功率没有增加,续航时间不会减少。此外,悬停状态下的机翼迎风面小,使得飞行器前进和后退的阻力较小,使飞行器的续航时间得以增加,并且在大风天气下,机翼受风力影响小,易于维持飞行器的稳定性。
26.本发明的实现不需要尾浆和副翼参与,所以相应的可以去除飞行器上配备的尾浆、副翼、副翼控制系统和尾浆控制系统,从而零件数量降低,飞行器总重量降低,续航能力进一步提升,并且不容易出现故障。
27.经实际测试,采用本发明的飞行器续航能力提高了10%
‑
28%,故障率降低了15%
‑
35%。
28.综上所述,采用本发明的飞行器具有续航能力好、不会产生副翼反效、稳定性好和不容易出现故障的优点。
附图说明
29.图1是本发明飞行器平行状态下的示意图。
30.图2是本发明飞行器悬停状态下的示意图。
31.图3是本发明飞行器向右翻滚时的俯视图。
32.图4是本发明飞行器左转时的俯视图。
33.图5是本发明飞行器低速向前飞行的俯视图。
34.图6是本发明飞行器低速向后飞行的俯视图。
35.图7是现有飞行操控方法下的飞行器平飞状态翻滚时的示意图。
36.图8是现有飞行操控方法下的飞行器悬停状态转向的示意图。
37.附图中的标记为:1
‑
机身,2
‑
转轴,3
‑
机翼,4
‑
螺旋桨,5
‑
副翼,6
‑
水平尾翼,7
‑
垂直尾翼,8
‑
升降舵,9
‑
尾浆。
具体实施方式
38.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
39.实施例。现有全动式机翼飞行器,左侧机翼3和右侧机翼3上的两个螺旋桨4的旋转方向如图1和图2中箭头所示。一种全动式机翼飞行器的飞行操控方法,对飞行器的以下动作进行操控,
40.侧向翻滚:将飞行器保持在平飞状态,平飞状态下,机翼3保持水平状态且长向垂直于机身1,左侧机翼3保持水平状态不变,通过偏转飞行器的右侧机翼3,使右侧机翼3内侧端向上翘起,实现飞行器的的向右翻滚,通过改变右侧机翼3的偏转角度改变飞行器向右翻滚的角加速度,偏转角度越大,飞行器向右翻滚速度越快;右侧机翼3保持水平状态不变,通过偏转左侧机翼3,使左侧机翼3的内侧端向上翘起,实现飞行器的的向左翻滚,通过改变左侧机翼3的偏转角度改变飞行器向左翻滚的角加速度,偏转角度越大,飞行器向左翻滚速度越快。
41.以飞行器向右翻滚为例,如图3所示,左右侧机翼3的升力分别为l和l’,当飞行器保持在平飞状态,l=l’=/ρcsv2,ρ为空气密度,c为机翼3的升力系数,s为机翼3面积,v为飞行器当前飞行速度。当右侧机翼3偏转θ度时,右侧机翼3升力方向也随之改变θ度,从而形成机翼3左右侧升力大小不同,左侧升力大于右侧升力,形成翻滚力矩,促使飞行器向右翻滚,翻滚角加速为α=1/2jρ/2v2[(1
‑
cosθ)
×
r+sinθ
×
r],其中j为飞行器的转动惯量,r为即l’在竖向上的分力l与无人机质心在机身1宽向上的距离,r为l’在水平向上的分力l与无人机质心在机身1高度上的距离。经实际测试,飞行器重量1.5千克、翼展(左右机翼3外侧端距离)米、飞行速度60公里/小时、飞行高度海拔0
‑
100米时,前3秒内可获得的平均角速度为480度/秒。
[0042]
转向:将飞行器保持在悬停状态,悬停状态下,机翼3保持竖直状态且长向平行于机身1,将两个机翼3的前侧端同步向左偏转,实现飞行器的左转,通过改变两个机翼3向左偏转的角度改变飞行器左转的角加速度;将两个机翼3的前侧端同步向右旋转,实现飞行器的右转,通过改变两个机翼3向右偏转的角度改变飞行器右转的角加速度。螺旋桨4转动产生的下洗气流,与机翼3以及机身1,相互影响产生侧洗气流,并产生侧洗气流,侧洗气流如图4所示,左右机翼3上的侧洗气流总体上偏向同一侧,从而使无人机转向。
[0043]
低速向前飞行(飞行速度0
‑
12公里/小时):将飞行器保持在悬停状态,将两个机翼3的前端内侧靠拢,并保持两个机翼3关于机身1镜像分布,实现飞行器的低速向前飞行,通过改变两个机翼3之间的夹角,改变飞行器的飞行角加速度。侧洗气流如图5所示,左右机翼3上的侧洗气流总体上关于机身1对称分布,且后侧的侧洗气流强度较大,从而产生更大的作用于飞行器的反推力,使飞行器低速向前飞行。
[0044]
低速向后飞行(飞行速度0
‑
12公里/小时):将飞行器保持在悬停状态,将两个机翼3的后端同步向内侧靠拢,并保持两个机翼3关于机身1镜像分布,实现飞行器的低速向后飞行,通过改变两个机翼3之间的夹角,改变飞行器的飞行角加速度。侧洗气流如图6所示,左右机翼3上的侧洗气流总体上关于机身1对称分布,且前侧的侧洗气流强度较大,从而产生更大的作用于飞行器的反推力,使飞行器低速向后飞行。
[0045]
所述左侧机翼3指的是位于飞行器飞行方向左侧的机翼3;所述右侧机翼3指的是
位于飞行器飞行方向右侧的机翼3。所述的悬停状态,并不表示飞行器的飞行速度为零。
[0046]
飞行器平飞状态下俯仰状态的改变:通过改变转动升降舵8,当升降舵8向上转动式,飞行器向下俯冲,反之,飞行器向上仰起,利用现有的飞行器上的升降舵控制系统实现。
[0047]
采用本发明的飞行器具有续航能力好、不会产生副翼反效、稳定性好和不容易出现故障的优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1