一种基于无人机的轻量目标跟踪装置的制作方法
[0001]
本实用新型涉及无人机领域,具体地,涉及一种基于无人机的轻量目标跟踪装置。
背景技术:
[0002]
现在计算机视觉的发展促进了各个领域的进步,也包括了无人机性能的提升。目前,多旋翼无人机的硬件结构和控制算法已经基本成熟,今后的发展重点主要在提高智能功能上。目前,无人机已经在协助公共安全、建筑、能源、基础建设、农业等领域发挥了重要的作用。
[0003]
大疆推出的“御”mavic2 pro实现了自动跟随等功能,但是其售价过高。而mavic mini 作为其轻量化产品,没有实现跟随功能,相机云台只能进行俯仰转动,无法进行水平转动。另外,哈尔滨工业大学也围绕智能无人机开展了一系列研究。杨喆在文章中介绍了哈工大团队搭建的基于无人机平台的目标检测和人机交互系统,该系统实现了无人机搭载摄像机,识别视频中的人,对其进行持续跟踪,并开启挥手检测系统。当检测到用户挥手时,系统切换到人机交互模式,对目标摆出的姿势进行识别,并根据识别结果做出相应的反应。文献中给出两种实现方式,一种是摄像头完成图像采集后,通过无线图像传输模块将视频,传输到地面站端,在地面站上使用搭载高性能显卡的深度学习工作站完成后续任务;另一种方式为在无人机上搭载嵌入式设备实现算法的机上运算。上述两种方式的检测系统硬件如下:摄像机部分使用的是gopro hero3运动相机,云台为tarot gopro双轴云台,图传模块为rc832和ts832,地面站端采用easycap usb图像采集卡对视频信号进行解析,使用gtx 1070显卡作为深度学习训练计算平台。无人机上搭载的嵌入式设备采用的是odroid-xu4。可以看到哈工大团队提出的两种目标检测方案都存在一定的局限性。如果图像通过无线传输模块传到地面站端,需要更多的地面配套设施,同时传输过程中的时延和噪声也会带来一定的影响;而采用odriod-xu4作为嵌入式设备进行计算,其运算速度不足以支持检测准确率很高的深度学习网络。
技术实现要素:
[0004]
针对现有技术中的缺陷,本实用新型的目的是提供一种基于无人机的轻量目标跟踪装置。
[0005]
根据本实用新型提供一种基于无人机的轻量目标跟踪装置,包括:
[0006]
用于承载相机的云台;
[0007]
设置于所述云台上的相机,所述相机用于获取图像;
[0008]
支持卷积网络的主控制板,所述主控制板的输入端与所述相机的输出端连接,所述主控制板的输出端与所述云台的控制驱动板输入端连接;所述支持卷积网络的主控制板获取所述相机采集的图像,并判断是否是跟踪目标以及计算得到跟踪目标的坐标中心与图像中心的差值,根据所述差值得出所述云台的转动量,根据所述转动量驱动所述云台运动从而调整所述相机的位置,使所述跟踪目标位于所述图像中心位置。
[0009]
可选地,所述云台选用三轴云台。所述三轴云台包括主体支架,以及设置于所述主体支架上的控制驱动板、航向电机、横滚电机、俯仰电机,其中所述主控制板位于所述航向电机处,所述控制驱动板连接并控制所述航向电机、所述横滚电机、所述俯仰电机,同时所述控制驱动板连接所述主控制板。
[0010]
可选地,所述主体支架包括第一支撑件、第二支撑件和第三支撑件,所述第一支撑件竖直放置,所述第二支撑件和所述第三支撑件均水平设置,所述第二支撑件安装于所述第一支撑件的上端,所述第三支撑件安装于所述第一支撑件的下端,在所述第三支撑件的一端与所述第一支撑件连接处安装所述横滚电机,在所述第三支撑件的另一端用于安装相机,在所述相机与所述第三支撑件之间设置所述俯仰电机。
[0011]
可选地,所述第二支撑件包括一上斜段和一水平段,所述上斜段一端与所述第一支撑件固定,另一端延伸出所述水平段,所述水平段上设置所述主控制板和所述航向电机,所述上斜段与水所述平段之间的夹角大于90度,从而使所述第二支撑件的水平段与所述第三支撑件之间有更大的空间,方便安装相机以及用于相机的横滚、俯仰运动。
[0012]
可选地,所述装置还包括相机运动传感器,用于测量相机的运动,所述相机运动传感器的输出端连接所述主控制板的输入端。
[0013]
与现有技术相比,本实用新型具有如下至少一种的有益效果:
[0014]
本实用新型上述装置,相机云台能够实现横滚(水平转动)、俯仰转动,不仅能实现自动跟随等功能,采用支持卷积网络的主控制板,同时满足了无人机上目标检测与跟踪的实时性和准确性。
[0015]
本实用新型上述整个装置十分轻量,便于扩展其他功能,采用的硬件价格低廉,适合小成本开发。
附图说明
[0016]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
[0017]
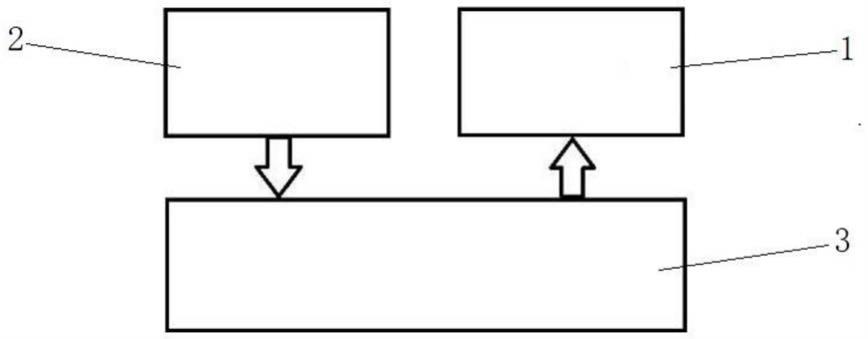
图1是本实用新型一实施例的基于无人机的装置原理框图;
[0018]
图2是本实用新型一优选实施例的装置结构示意图;
[0019]
图3是本实用新型一优选实施例的云台控制原理图;
[0020]
图中标记分别表示为:1为云台、2为相机、3为主控制板、4为航向电机、5为横滚电机、6为俯仰电机、7为相机运动传感器、8为第一支撑件、9为第二支撑件、10 为第三支撑件、11为水平段、12为上斜段、13为夹具。
具体实施方式
[0021]
下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进。这些都属于本实用新型的保护范围。
[0022]
以下,“第一”、“第二”仅用于方便描述,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含
地包括一个或者更多个该特征。在本实施例的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0023]
参照图1所示,为本实用新型一实施例的基于无人机的轻量目标跟踪装置结构框图,包括:云台1、相机2和主控制板3。相机2安装在云台1上,相机2用于获取跟踪目标的图像。将支持卷积网络的主控制板3放置在云台1上,主控制板3的输入端与相机 2的输出端连接,主控制板3的输出端与云台1的控制驱动板输入端连接。主控制板3 获取相机2采集的图像,并在主控制板3的卷积网络下检测目标,是否选择跟踪目的,当选择不跟踪目的时,结束本次操作,当时当选择为跟踪目的时,在卷积网络下计算得到跟踪目标的坐标的中心与图像中心的差值,根据上述差值得出云台1的转动量,根据转动量驱动云台1运动从而调整相机2的位置,使跟踪目标位于图像中心位置。
[0024]
作为一优选实施方式,云台1可以采用三轴云台。参照图2所示,基于无人机的轻量目标跟踪装置包括:云台1、相机2和主控制板3。三轴云台包括控制驱动板,主体支架,以及设置于主体支架上的航向电机4、横滚电机5、俯仰电机6,其中主控制板3 位于航向电机4处,云台1还设置有相机2安装部件,用于安装和固定相机2。控制驱动板连接并控制航向电机4、横滚电机5、俯仰电机6,同时控制驱动板连接主控制板。
[0025]
参照图2所示,该实施例中三轴云台的主体支架包括第一支撑件8、第二支撑件9 和第三支撑件10,第一支撑件8竖直放置,第二支撑件9和第三支撑件10均水平设置,第二支撑件9安装于第一支撑件8的上端,第三支撑件10安装于第一支撑件8的下端,在第三支撑件10的一端与第一支撑件8连接处安装有横滚电机5,在第三支撑件10的另一端用于安装相机2,在相机2与第三支撑件10之间还设置有俯仰电机6,用于实现相机的俯仰调节。横滚电机5驱动第三支撑件10以其平方向为轴向,绕该轴向进行翻滚,从而带动另一端的俯仰电机6和相机2同时进行翻滚运动。
[0026]
较佳地,相机2通过一夹具13固定在俯仰电机6的一侧,俯仰电机6的另一侧与第三支撑件10的另一端固定。具体的,夹具13可以采用很多形状,比如常用的爪状。
[0027]
较佳地,第二支撑件9包括一上斜段12和一水平段11,上斜段12一端与第一支撑件8固定,另一端延伸出水平段11,水平段11上设置主控制板3和航向电机4,上斜段12与水平段11之间的夹角大于90度,从而使的第二支撑件9的水平段11与第三支撑件之间有更大的空间,方便安装相机2以及用于相机2的各种横滚、俯仰等运动。从而三轴云台带动相机2运动可以改变其位置和角度,实现主动跟踪和定位被拍摄目标,且空间和安装布置位置合理,不影响相机的运动和跟踪。
[0028]
在另一实施例中,基于无人机的轻量目标跟踪装置还包括相机运动传感器7,用于测量相机2的运动,相机运动传感器7的输出端连接主控制板3的输入端。
[0029]
在一具体实施例中,主控制板3和控制驱动板均可以采用现有产品来进行,比如主控制板3可以选择artosyn公司开发的ar9201平台。控制驱动板采用storm32-bgc。相机2可以选择山狗相机sj4000。相机运动传感器7可以安装在例如航向轴或航向电机的上面。相机运动传感器7安装完成后再进行传感器定位、对齐航向轴、传感器配置、 pid参数调整等步骤。支持卷积网络的主控制板3可以选择合适的检测网络,既能提升检测的性能又能简化开发的流程,在一实施例中可以选择mobilenet-ssd检测网络,这个网络被artosyn官方支持,在输入图像尺寸为300
×
300的情况下,处理视频的帧率能达到23fps,基本能实现实时检
测。支持卷积网络的主控制板3根据检测的结果控制云台1。根据主控制板ar9201计算的检测目标坐标的中心与视频中心的差值e(n),采用pd 算法驱动云台1,具体公式如下:
[0030]
s(n)=k
p
e(n)+k
d
[e(n)-e(n-1)]
[0031]
其中,n表示第n次采样,k
p
为比例参数,k
d
为微分参数,s(n)为转动量。最后,通过上述模型计算出云台1的转动量,再通过舵机控制函数完成云台1的控制。
[0032]
综上,本实用新型的实施例不仅能实现自动跟随等功能,而且其轻量化产品,相机云台能够实现横滚(水平转动)、俯仰转动,支持卷积网络的主控制板3运算速度快,检测准确率很高。采用的硬件价格低廉,适合小成本开发。
[0033]
本申请文件中使用到各类部件如没有详细说,均可以采用标准件或常用技术,可以从市场上购买,各个零件的具体连接方式可以采用现有技术中成熟的螺栓、铆钉和焊接等常规手段,机械、零件和电器设备均采用现有技术中的常规型号,电路连接采用现有技术中常规的连接方式,对于所属领域的技术人员都是很容易实现的,在此不再作出具体叙述。
[0034]
以上实施例的各优选技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0035]
以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本实用新型的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1