一种飞机刹车的控制结构的制作方法
1.本实用新型属于飞机机轮刹车技术领域,尤其涉及一种飞机刹车的控制结构。
背景技术:
2.差动刹车是用于飞机滑跑方向纠偏和飞机地面转弯的操纵模式。在进入跑道和退出跑道过程中,驾驶员操纵飞机地面转弯是不可缺少的动作。对于没有专门设计前轮转弯操纵机构的飞机来说,地面滑行转弯主要通过飞机刹车系统对左右起落架机轮差动刹车来实现。即使有前轮转弯操纵机构,差动刹车也是进行飞机滑跑方向控制的有效方法。刹车转弯方向取决于两侧机轮刹车力矩值,哪侧刹车力矩大飞机机头将向那侧转向,导引飞机向所需的方向运动。
3.对于手刹车操纵方式,飞机刹车系统只有一个液压刹车阀,同时配置一个刹车分配阀,由驾驶员脚踩刹车分配阀进行差动刹车。对于脚刹车操纵方式,飞机刹车系统有单独的两个刹车阀,由驾驶员脚踩输出不同的刹车压力进行差动刹车。
4.飞机在地面转弯时的飞机速度一般在飞机刹车系统防滑失效速度范围内,在该防滑失效速度内,防滑刹车控制盒将退出防滑控制,以免干扰或妨碍转弯。飞机防滑刹车控制是依靠安装在主起落架机轮上的机轮速度传感器检测到的机轮速度代表飞机速度,以此作为基准速度来判断飞机刹车过程中机轮是否打滑。在机轮刹车系统与起落架匹配情况下,以机轮速度传感器发出的速度信号能够代表飞机速度。使用发现,某些飞机刹车转弯中起落架变形抖动,使机轮速度传感器检测信号异常,从而诱发防滑刹车控制运行,使本不该释放刹车压力的机轮频繁泄压,使飞机在地面刹车转弯困难甚至不能转弯。
5.在低速滑行刹车中也出现起落架变形,使防滑刹车控制介入而刹不住车,驾驶员反映刹车疲软、效率低的问题。已经提出和采用一些解决措施,但这些问题时有发生,仍然满足不了驾驶员操纵需求。现有技术中某些飞机地面刹车转弯困难甚至不能转弯的不足,不仅影响使用,驾驶员操纵抱怨大,而且对于训练飞行影响后续飞机安全着陆,迫切需要技术改进。
技术实现要素:
6.为了解决上述技术问题,本实用新型实施例提供了一种飞机刹车的控制结构,在现有飞机起落架结构情况下,采用飞机速度信号和左右指令刹车压力差双参量作为确定是否运行防滑控制的准则,在退出防滑控制和机轮速度传感器信号失真情况,提高了飞机机轮刹车系统的抗干扰性,确保驾驶员刹车指令或刹车转弯指令的有效执行,有利于飞行安全。
7.为达到上述目的,本实用新型采用如下技术方案予以实现。
8.一种飞机刹车的控制结构,所述控制结构中的刹车操纵方式为脚刹车、脚差动的刹车方式,所述控制结构包括:左液压刹车阀、右液压刹车阀、防滑刹车控制盒、左电液伺服阀、右电液伺服阀、左机轮速度传感器、右机轮速度传感器、左压力传感器和右压力传感器;
9.左液压刹车阀和右液压刹车阀的刹车口分别与左电液伺服阀的进油口和右电液伺服阀的进油口液压管路连接;
10.左电液伺服阀的电气接和右电液伺服阀的电气接口分别与防滑刹车控制盒的电气接口的左阀电流输出端和右阀电流输出端电连接;
11.左机轮速度传感器和右机轮速度传感器的电气接口分别与防滑刹车控制盒的电气接口的左轮速度输入端和右轮速度输入端电连接;
12.左压力传感器和右压力传感器的液压接口分别与左液压刹车阀和右液压刹车阀的刹车口液压管路连接,左压力传感器和右压力传感器的电气接口分别与防滑刹车控制盒5的电气接口的左压力输入端和右压力输入端电连接。
13.防滑刹车控制盒的电气接口分别与左液压刹车阀和右液压刹车阀的电气接口连接;
14.防滑刹车控制盒的电气接口还设有飞机速度输入端,防滑刹车控制盒的电气接口的飞机速度输入端与飞机速度信号源电连接。
15.本实用新型技术方案的特点和进一步的改进为:
16.(1)左液压刹车阀和右液压刹车阀的进油口分别与飞机刹车系统供压源液压管路连接,左液压刹车阀和右液压刹车阀的回油口与飞机刹车系统回油管路连接。
17.(2)左电液伺服阀的回油口和右电液伺服阀的回油口与飞机刹车系统回油管路连接。
18.(3)在没有得到防滑控制电流情况下,左电液伺服阀和右电液伺服阀相当于一节管路。
19.(4)左液压刹车阀和右液压刹车阀的用于分别启动左机轮和右机轮的刹车,向机轮刹车装置发出刹车指令和提供刹车压力。
20.(5)左液压刹车阀和右液压刹车阀输出刹车压力不等或仅一个液压刹车阀有刹车压力输出时,用于控制飞机方向刹车纠偏和飞机滑行地面转弯。
21.(6)双脚以相等的力量操纵左液压刹车阀和右液压刹车阀对飞机机轮进行刹车,左机轮和右机轮的刹车压力相等时,飞机直线运动并减速。
22.(7)双脚以不相等的力量操纵左液压刹车阀和右液压刹车阀,或仅操纵一个液压刹车阀时,对飞机机轮进行刹车差动,进行刹车纠偏和地面转弯,改变飞机运动方向。
23.(8)在没有得到防滑控制电流情况下,左电液伺服阀和右电液伺服阀相当于一节管路。
24.(9)所述飞机速度信号源为飞机飞参系统或者飞机前轮速度传感器。
25.本实用新型的通过增加采集飞机速度信号和增加压力传感器采集左右机轮指令刹车压力,以飞机速度和指令刹车压力差作为退出防滑控制的决断参量,只要刹车转弯时的飞机速度在防滑失效速度内,防滑刹车控制盒即退出防滑控制,或者只要左右指令刹车压力差大于设定值,防滑刹车控制盒亦退出防滑控制,保证地面刹车转弯和低速滑行刹车不受虚假信号诱发防滑控制的干扰。本实用新型结构合理,简便易行,可有效解决现有技术中某些飞机地面刹车转弯困难甚至不能转弯,以及低速滑行刹不住车、刹车效率低的不足,同时保证飞机着陆滑跑刹车过程中及时有效的防滑控制,避免刹爆轮胎。在现有飞机起落架结构情况下,采用飞机速度信号和左右指令刹车压力差双参量作为确定是否运行防滑控
制的准则,在退出防滑控制和机轮速度传感器信号失真情况,提高了飞机机轮刹车系统的抗干扰性,确保驾驶员刹车指令或刹车转弯指令的有效执行,有利于飞行安全。
附图说明
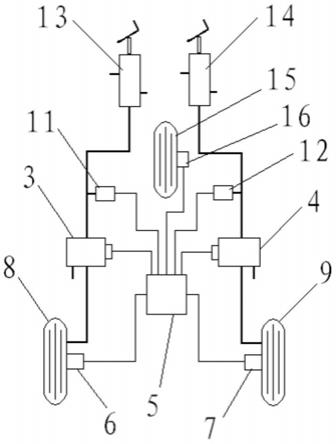
26.图1为本实用新型实施例提供的一种飞机刹车的控制结构的结构示意图;
27.图2为本实用新型实施例提供的一种飞机刹车的控制方法的流程示意图;
28.其中,3
‑
左电液伺服阀,4
‑
右电液伺服阀,5
‑
防滑刹车控制盒,6
‑
左机轮速度传感器,7
‑
右机轮速度传感器,8
‑
左机轮,9
‑
右机轮,11
‑
左压力传感器, 12
‑
右压力传感器,13
‑
左液压刹车阀,14
‑
右液压刹车阀,15
‑
前轮,16
‑
前轮速度传感器。
具体实施方式
29.为使本实用新型的目的、技术方案和优点更加清楚明白,下文中将结合附图对本实用新型的实施例进行详细说明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互任意组合。
30.本实施例所示飞机刹车控制结构的操纵方式为脚刹车、脚差动的飞机刹车系统。如图1所示,该飞机刹车控制结构包括左液压刹车阀13和右液压刹车阀 14,左右液压刹车阀13、14用于分别启动左机轮8和右机轮9的刹车,向机轮刹车装置发出刹车指令和提供刹车压力,左右液压刹车阀13、14输出刹车压力不等或仅一个液压刹车阀有刹车压力输出,用于控制飞机方向刹车纠偏和飞机滑行地面转弯。左右液压刹车阀13、14进油口分别与飞机刹车系统供压源液压管路连接,左右液压刹车阀13、14回油口与飞机刹车系统回油管路连接,左右液压刹车阀13、14刹车口分别与左电液伺服阀3的进油口和右电液伺服阀4的进油口液压管路连接。双脚以相等的力量操纵左右液压刹车阀13、14 对飞机机轮进行刹车,左机轮8和右机轮9的刹车压力相等,飞机直线运动并减速;双脚以不相等的力量操纵左右液压刹车阀13、14,或仅操纵一个液压刹车阀,例如,脚操纵左液压刹车阀13,可对飞机机轮进行刹车差动,实现刹车纠偏和地面转弯,改变飞机运动方向。
31.一种飞机防滑刹车控制方法及系统,所述控制结构包括:防滑刹车控制盒 5、左电液伺服阀3和右电液伺服阀4、左机轮速度传感器6和右机轮速度传感器7、左压力传感器11和右压力传感器12。
32.左电液伺服阀3的电气接和右电液伺服阀4的电气接口分别与防滑刹车控制盒5的电气接口的左阀电流输出端和右阀电流输出端电连接,左电液伺服阀 3的进油口和右电液伺服阀4的进油口分别与左右液压刹车阀13、14刹车口液压管路连接,左电液伺服阀3的回油口和右电液伺服阀4的回油口与飞机刹车系统回油管路连接。在没有得到防滑控制电流情况下,左电液伺服阀3和右电液伺服阀4相当于一节管路。
33.左机轮速度传感器6和右机轮速度传感器7的电气接口分别与防滑刹车控制盒5的电气接口的左轮速度输入端和右轮速度输入端电连接。
34.左压力传感器11和右压力传感器12的液压接口分别与左右液压刹车阀 13、14刹车口液压管路连接,左压力传感器11和右压力传感器12的电气接口分别与防滑刹车控制盒5的电气接口的左压力输入端和右压力输入端电连接。
35.防滑刹车控制盒5的电气接口分别与左电液伺服阀3和右电液伺服阀4、左机轮速
度传感器6和右机轮速度传感器7、左压力传感器11和右压力传感器 12的电气接口连接,此外,防滑刹车控制盒5的电气接口设有飞机速度输入端,防滑刹车控制盒5的电气接口的飞机速度输入端与飞机速度信号源电连接,该信号源包括飞机飞参系统,飞机前轮速度传感器,本实施例该信号源为前轮速度传感器,飞机速度信号由飞机前轮速度传感器16提供。
36.如图2所示,所述控制方法包括:
37.第一步、采集飞机速度。
38.飞机速度由飞机飞参系统提供,或由飞机前轮速度传感器提供。本实施例飞机速度由飞机前轮速度传感器提供。
39.第二步、采集机轮速度。
40.机轮速度由飞机左右机轮速度传感器提供。
41.第三步、采集指令刹车压力。
42.指令刹车压力由左右压力传感器提供。
43.第四步、确定防滑控制运行。
44.根据飞机速度或左右指令刹车压力差确定防滑控制运行或退出:
45.当飞机速度高于防滑失效速度时,防滑刹车控制盒执行防滑控制。当飞机速度低于防滑失效速度时,防滑刹车控制盒退出防滑控制。
46.防滑失效速度一般为25
‑
35km/h,本实施例防滑失效速度为35km/h。
47.当左右指令刹车压力差小于设定值时,防滑刹车控制盒执行防滑控制。当左右指令刹车压力差大于设定值时,防滑刹车控制盒退出防滑控制。
48.左右指令刹车压力差设定值为2.5mpa,或最大刹车压力的25%,本实施例最大刹车压力为12mpa,左右指令刹车压力差设定值为3mpa。
49.第五步、确定防滑控制电流。
50.当飞机速度高于防滑失效速度时,且左右指令刹车压力差小于设定值,根据机轮速度信号反映的刹车机轮滑动状态,如果刹车机轮滑动超过门限,防滑刹车控制盒向电液伺服阀发出相应大小的防滑控制电流,以解除机轮打滑。
51.防滑控制按现有技术。
52.本实用新型实施例提供一种确保飞机刹车转弯的控制方法及系统,通过增加采集飞机速度信号和增加压力传感器采集左右机轮指令刹车压力,以飞机速度和指令刹车压力差作为退出防滑控制的决断参量,只要刹车转弯时的飞机速度在防滑失效速度内,防滑刹车控制盒即退出防滑控制,或者只要左右指令刹车压力差大于设定值,防滑刹车控制盒亦退出防滑控制,保证地面刹车转弯和低速滑行刹车不受虚假信号诱发防滑控制的干扰。本实用新型结构合理,简便易行,可有效解决现有技术中某些飞机地面刹车转弯困难甚至不能转弯,以及低速滑行刹不住车、刹车效率低的不足,同时保证飞机着陆滑跑刹车过程中及时有效的防滑控制,避免刹爆轮胎。在现有飞机起落架结构情况下,采用飞机速度信号和左右指令刹车压力差双参量作为确定是否运行防滑控制的准则,在退出防滑控制和机轮速度传感器信号失真情况,提高了飞机机轮刹车系统的抗干扰性,确保驾驶员刹车指令或刹车转弯指令的有效执行,有利于飞行安全。
53.虽然本实用新型所揭露的实施方式如上,但所述的内容仅为便于理解本实用新型而采用的实施方式,并非用以限定本实用新型。任何本实用新型所属领域内的技术人员,在
不脱离本实用新型所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本实用新型的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1