一种用于土地检测的无人机的制作方法
1.本技术涉及无人机的技术领域,尤其是涉及一种用于土地检测的无人机。
背景技术:
2.近些年,无人机在摄影、遥感和测绘等领域的应用越来越广泛,携带摄像头的多旋翼无人机被广泛应用到土地勘测、航拍监测等部门。
3.授权公告号为cn109774933a的中国实用新型专利公开了一种续航性能优异的专业拍摄用无人机设备,包括无人机外壳和底座,无人机外壳的内部设置有双锂电池,且无人机外壳的前端固定安装有gps接收器,无人机外壳的一侧固定连接有凸块,且凸块的上端外表面固定连接有固定柱,无人机外壳的底端外表面设置有二号微型电机,且二号微型电机的一侧固定连接有三号微型电机,三号微型电机的一端活动连接有高清摄像头。
4.上述的无人机在航拍的过程中,高清摄像头在若干个微型电机的驱动下能够多个方向转动,但是由于高清摄像头的高度比底座高,高清摄像头在拍摄时视线会被底座所阻挡,因此需要对其进行改进。
技术实现要素:
5.本技术的目的是提供一种用于土地检测的无人机,在无人机进行拍摄时无人机的支脚不遮挡摄像头的拍摄,从而减少拍摄盲区,使获得的信息更加完整。
6.本技术的上述申请目的是通过以下技术方案得以实现的:
7.一种用于土地检测的无人机,包括无人机的机体、对机体进行支撑的多个支脚以及设置在机体下方的相机组件,所述支脚包括接地端和转动端,所述机体上在与支脚对应的位置开设有放置转动端的放置槽,所述机体内还设有驱动支脚转动的动力组件。
8.通过采用上述技术方案,相机组件进行拍摄工作,由于支脚可绕转动端进行转动,因此,在拍摄时转动支脚,使其不遮挡相机组件的拍摄工作,从而拍摄到的信息更加完整准确,拍摄结束后将支脚转回原位,落地时对无人机进行支撑,结构简单,使用方便。
9.可选的,所述机体内部的两侧转动连接有驱动杆,所述驱动杆固定连接支脚的转动端,所述驱动杆固定连接的支脚之间还设有用于加固支脚的加固杆
10.通过采用上述技术方案,驱动杆固定连接两个支脚,减少出现支脚转动不同步的可能性,进一步保证了摄像头的拍摄无死角,同时加固杆提高了支脚的稳固性,使无人机落地时保持稳定。
11.可选的,所述动力组件包括驱动驱动杆转动的第一驱动件,所述驱动杆上固定连接有锥形齿轮一,所述第一驱动件的驱动轴上固定连接有与锥形齿轮一啮合的锥形齿轮二。
12.通过采用上述技术方案,第一驱动件的驱动轴带动锥形齿轮二转动,由于锥形齿轮一与锥形齿轮二啮合,因此锥形齿轮一转动,从而带动支脚进行转动,单个第一驱动件可带动两个支脚转动,节省空间和成本。
13.可选的,所述相机组件包括摄像头和驱动摄像头升降的第二驱动件,所述摄像头与第二驱动件的驱动轴转动连接。
14.通过采用上述技术方案,第二驱动件驱动摄像头进行升降,可控制摄像头的拍摄角度更广,摄像头与第二驱动件的驱动轴转动连接,进一步方便了摄像头的拍摄。
15.可选的,所述集体下方还设有套筒,所述套筒固定连接在机体上,所述套筒套设摄像头和第二驱动件。
16.通过采用上述技术方案,套筒对摄像头和第二驱动件进行保护,减少现价组件损坏的可能性。
17.可选的,所述第二驱动件的驱动轴上固定连接有限位杆,所述限位杆水平设置,且所述限位杆穿过套筒向套筒外延伸,所述套筒上设有供限位杆上下滑动的滑槽。
18.通过采用上述技术方案,限位杆与滑槽配合使用,对摄像头升降起到限位效果,减少了摄像头发生偏移的可能性。
19.可选的,所述限位杆的两端均设有限位片,所述加固杆上设有与限位杆配合使用的连接杆,所述连接杆背离加固杆的一端设有与限位片配合使用的夹持板。
20.通过采用上述技术方案,限位杆与摄像头同步升降,拍摄时,限位杆向下移动,限位片释放夹持板,之后支脚向上转动,摄像头开始拍摄,拍摄结束后,支脚和夹持板转回原位,限位杆向上移动,限位片与夹持板扣合,对支脚位置进行限定,使得支脚在落地时更加稳固。
21.可选的,所述支脚的接地端还设有减震组件,所述减震组件包括底座和定位弹簧。
22.通过采用上述技术方案,减震组件在无人机落地时对无人机进行缓冲,减少了无人机零件损坏的可能性。
23.综上所述,本技术的有益技术效果为:
24.1.支脚可转动,拍摄时转动支脚可使支脚不遮挡摄像头,保证了拍摄信息的完整性;
25.2.限位杆和加固杆配合使用对支脚进一步加固,使得支脚结构更加稳固,保证了无人机的安全性;
26.3.支脚接地端设有减震组件,落地时对无人机进行缓冲,进一步减少了无人机零件损坏的可能性。
附图说明
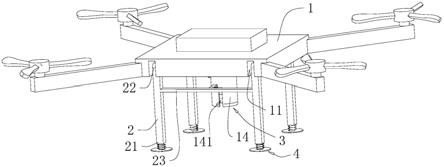
27.图1是本技术实施例的整体结构示意图。
28.图2是本技术实施例的正面剖视图。
29.图3是本技术实施例中机体的上视图。
30.图4是图2中a部分的局部放大示意图。
31.图5是本技术实施例中相机组件的结构示意图。
32.图6是图5中b部分的局部放大示意图。
33.附图标记:1、机体;11、放置槽;12、驱动杆;121、锥形齿轮一;13、动力组件;131、第一驱动件;132、锥形齿轮二;14、套筒;141、滑槽;2、支脚;21、接地端;211、限位块;22、转动端;23、加固杆;24、连接杆;241、夹持板;25、内槽;3、相机组件;31、摄像头;32、第二驱动件;
33、限位杆;331、限位片;332、夹持口;4、减震组件;41、底座;411、滑柱;412、底板;413、凸块;42、定位弹簧。
具体实施方式
34.以下结合附图对本技术作进一步详细说明。
35.参照图1,为本技术公开的一种用于土地检测的无人机,包括无人机机体1、用于支撑机体1的支脚2以及设置在机体1下方的相机组件3。机体1可以是圆柱体、多边体等,为了方便设置,本技术中机体1形状采用长方体形。支脚2也可以是多个,为了方便展示,本技术中设置四个支脚2,支脚2包括接地端21和转动端22,支脚2设置在机体1的四个边角,在机体1上开设有放置转动端22的放置槽11,放置槽11置于机体1的边缘侧,支脚2可绕转动端22转动。
36.参照图2和图3,机体1呈对称设置,以对称的一侧为例,包括两个支脚2和两个与支脚2配合使用的放置槽11,为了同时控制两个支脚2,保证支脚2同步转动,在两个放置槽11之间设有可在机体1内转动的驱动杆12,驱动杆12与两个支脚2的转动端22一体设置,因此驱动杆12转动即可带动支脚2同步转动。驱动杆12上设有驱动驱动杆12转动的动力组件13,动力组件13包括套设在驱动杆12上的锥形齿轮一121,在驱动杆12的一侧设有第一驱动件131,本技术采用电动机作为第一驱动件131,电动机的驱动轴上设有与锥形齿轮一121配合使用的锥形齿轮二132,电动机带动锥形齿轮二132转动,继而带动锥形齿轮一121转动,从而使得驱动杆12带动支脚2进行转动。为了使支脚2更加稳定,在连接同一根连接杆24的两个支脚2之间还设有加固杆23,加固杆23的两端分别固定连接两个支脚2,使支脚2的结构更加稳固。
37.参照图2和图4,在支脚2的接地端21还设有减震组件4,在无人机落地时对其进行缓冲作用,减少损坏无人机元件的可能性。减震组件4包括底座41和定位弹簧42,支脚2的接地端21沿支教的长度方向开设有内槽25,内槽25开口朝下且内槽25形状为圆柱体,底座41包括与内槽25配合使用的滑柱411和与地面接触的底板412。为了防止滑柱411脱离内槽25,在支脚2的接地端21上还设有环形限位块211,限位块211置于内槽25的开口处,使得内槽25内部直径大于开口直径,同时,在滑柱411背离底板412的一端一体设置有环形凸块413,凸块413的直径大于内槽25开口的直径,且滑柱411的直径小于内槽25开口的直径,因此,底座41在滑动时由于限位块211和凸块413配合作用使得底座41不会脱离支脚2。定位弹簧42套设在滑柱411上,无人机落地时,底座41接触地面,无人机自身的重力使定位弹簧42受力进行收缩,滑柱411在内槽25内滑动,实现对无人机落地减震的目的。
38.参照图1和图5,相机组件3包括摄像头31和控制摄像头31升降的第二驱动件32,本技术中采用气缸作为第二驱动件32,气缸的底座41与机体1的底部固定连接,且摄像头31与气缸的驱动轴转动连接,方便摄像头31进行转动,同时气缸的驱动轴上下移动即可带动摄像头31上下移动。为了保护摄像头31和气缸,减少损坏的可能性,在机体1底部设有套设摄像头31和气缸的套筒14,套筒14的一端与机体1底部进行焊接,套筒14的长度大于摄像头31和气缸的最短长度,且小于气缸驱动轴完全伸出时气缸的长度。因此摄像头31收起时,套筒14能够完全覆盖摄像头31和气缸,而摄像头31伸出时套筒14不阻挡摄像头31的拍摄。
39.参照图5和图6,为了使无人机落地时支脚2更加稳定,在气缸的驱动轴上穿设有限
位杆33,限位杆33水平设置,限位杆33的两端穿过套筒14并向套筒14外延伸,同时在套筒14上开设有供限位杆33上下滑动的滑槽141,因此,限位杆33跟随气缸的驱动轴进行在滑槽141内进行上下滑动,且与摄像头31的移动同步。在限位杆33的两端分别设有两片对应设置的限位片331,限位片331为弹性片,本技术中限位片331采用弯曲成圆弧的铜片制成,两片铜片的弯曲部抵接,对应形成开口向上的夹持口332。在加固杆23上还设有与限位杆33配合工作的连接杆24,连接杆24与加固杆23固定连接,连接杆24背离加固杆23的一端设有夹持板241,夹持板241能从夹持口332插进限位片331内。因此限位片331对连接杆24进行固定,继而对加固杆23以及支脚2进行固定,减少无人机落地时支脚2发生转动导致无人机落地不稳定的可能性。
40.本技术实施例一种用于土地检测的无人机的实施原理为:未使用无人机进行拍摄时,摄像头31置于套筒14内,拍摄时,气缸的驱动轴推动摄像头31向下移动出套筒14,带动限位杆33向下移动,释放夹持板241,之后电动机控制驱动杆12转动从而带动支脚2进行转动,使支脚2绕转动端22转动至水平位置,不影响摄像头31的拍摄。拍摄结束后,首先将支脚2转动至竖直方向,之后气缸驱动摄像头31向上移动进套筒14内,同时限位杆33向上移动,直至限位片331与夹持板241进行扣合,无人机落地时减震组件4对无人机进行缓冲,实现减震效果。
41.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1