一种用于无人飞行器航摄的倾斜摄影测量装置的制作方法
1.本实用新型涉及一种用于无人飞行器航摄的倾斜摄影测量装置。
背景技术:
2.二维基础地理信息数据已经很难满足我国城市信息化建设的要求,gis已经从二维尺度发展到三维尺度,三维数字城市模型是数字地球的重要组成部分。构造三维数字城市模型一般包括几何建模和纹理重建两部分工作,目前无论是几何建模,还是纹理重建在具体实现方法上种类繁多,但均存在相同的缺点:一是数据源较多,卫星影像、垂直摄影影像、lidar数据、全站仪等地面设备所采集的线画图数据、地面人工采集的纹理照片等,二是几何建模与纹理重建之间数据源不通用,三是后处理软件繁多,处理流程复杂,自动化程度较低,生产周期较长,四是生产成本大。因此,需针对三维数字城市模型构造的要求,开发出专有的硬件平台获取较为完整的数据,从源头上改变目前三维数字城市模型的生产状态;
3.现有的摄影测量装置其摄像头不能进行多方位调节,全靠无人机进行方位的调整,导致整体测量数据存在偏差,因此急需一种能多方位调节用于无人飞行器航摄的倾斜摄影测量装置解决此问题。
技术实现要素:
4.本实用新型的目的旨在提供一种能多方位调节用于无人飞行器航摄的倾斜摄影测量装置;
5.按此目的设计的一种用于无人飞行器航摄的倾斜摄影测量装置,包括有安装座,在所述安装座的下部设有环型开槽,在所述环型开槽内活动卡接有环型转盘,在所述环型转盘上设有多个上下贯穿的通槽,在所述通槽内设有第一摆动座,所述第一摆动座通过转轴安装在所述通槽的两侧内壁上,在所述第一摆动座下部安装有倾斜摄像头,在每个所述的通槽一侧的环型转盘上设有用于驱动所述转轴转动的第二驱动组件,在所述安装座上设有用于驱动所述环型转盘转动的第一驱动组件;
6.作为优选地,所述第二驱动组件包括设置在所述转轴上的第一锥齿轮,在每个所述的通槽一侧的环型转盘上设有第一固定支架,所述第一固定支架上设有第一电机,所述第一电机的电机轴上设有第二锥齿轮,所述第二锥齿轮与所述第一锥齿轮互相啮合;
7.作为优选地,所述第一驱动组件包括设置在所述安装座上的第二固定支架,在所述第二固定支架上安装有第二电机,所述第二电机的电机轴上安装有第一齿轮,所述环型转盘上设有环型齿轮,所述第一齿轮与所述环型齿轮互相啮合;
8.作为优选地,所述安装座上还设有垂直摄像头;
9.作为优选地,所述安装座上设有垂直安装座,所述垂直安装座与所述环型转盘的轴心重合,所述垂直摄像头设置在所述垂直安装座上;
10.作为优选地,所述安装座上还设有图像存储装置和控制器,所述控制器分别与所述第二驱动组件和第一驱动组件信号连接,所述控制器通过数据线分别与倾斜摄像头、垂
直摄像头和图像存储装置连接;
11.作为优选地,所述安装座的下端面上设有防护盖,所述防护盖与所述安装座可拆卸连接;
12.作为优选地,所述安装座的下端面上均布有多个减震支架,所述减震支架包括有固定套筒,所述固定套筒的下端面开口设置,在所述固定套筒下部往上插接有减震柱,所述减震柱与所述固定套筒内壁连接有减震弹簧,所述减震柱下端面上设有减震垫;
13.作为优选地,所述减震垫由橡胶垫和海绵垫组合而成;
14.本实用新型通过在所述安装座的下部设有环型开槽,在所述环型开槽内活动卡接有环型转盘,在所述环型转盘上设有多个上下贯穿的通槽,在所述通槽内设有第一摆动座,所述第一摆动座通过转轴安装在所述通槽的两侧内壁上,在所述第一摆动座下部安装有倾斜摄像头,在每个所述的通槽一侧的环型转盘上设有用于驱动所述转轴转动的第二驱动组件,在所述安装座上设有用于驱动所述环型转盘转动的第一驱动组件,即可实现所述倾斜摄像头不仅能对自身的倾斜角度进行调节,而且还能通过环型转盘转动,进行位置的调节,以更好的配合无人机进行拍摄测量,结构简单,符合使用所需。
附图说明
15.图1为本实用新型的立体结构示意图之一;
16.图2为本实用新型的剖面结构示意图;
17.图3为本实用新型的立体结构示意图之二;
18.图4为本实用新型图3中a处放大示意图;
19.图5为本实用新型中减震支架的结构示意图。
具体实施方式
20.下面结合附图及实施例对本实用新型作进一步描述;
21.参见图1
‑
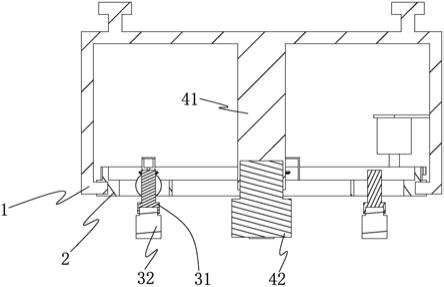
图5,一种用于无人飞行器航摄的倾斜摄影测量装置,包括有安装座1,在所述安装座1的下部设有环型开槽,在所述环型开槽内活动卡接有环型转盘2,在所述环型转盘2上设有多个上下贯穿的通槽21,在所述通槽21内设有第一摆动座31,所述第一摆动座31通过转轴30安装在所述通槽21的两侧内壁上,在所述第一摆动座31下部安装有倾斜摄像头32,在每个所述的通槽21一侧的环型转盘2上设有用于驱动所述转轴30转动的第二驱动组件6,在所述安装座1上设有用于驱动所述环型转盘2转动的第一驱动组件5,即可实现所述倾斜摄像头不仅能对自身的倾斜角度进行调节,而且还能通过环型转盘转动,进行位置的调节,以更好的配合无人机进行拍摄测量,结构简单,符合使用所需;
22.参见图1
‑
图5,所述第二驱动组件6包括设置在所述转轴30上的第一锥齿轮64,在每个所述的通槽21一侧的环型转盘2上设有第一固定支架61,所述第一固定支架61上设有第一电机62,所述第一电机62的电机轴上设有第二锥齿轮63,所述第二锥齿轮63与所述第一锥齿轮64互相啮合,通过第一电机驱动带动第二锥齿轮转动,所述第二锥齿轮带动第一锥齿轮驱使转轴30转动,从而带动所述第一摆动座进行角度调节,从而调节所述倾斜摄像头32的倾斜角度,以更好的配合无人机进行拍摄测量,结构简单,符合使用所需;
23.参见图1
‑
图5,所述第一驱动组件5包括设置在所述安装座1上的第二固定支架51,
在所述第二固定支架51上安装有第二电机52,所述第二电机52的电机轴上安装有第一齿轮53,所述环型转盘2上设有环型齿轮54,所述第一齿轮53与所述环型齿轮54互相啮合,通过第二电机带动第一齿轮转动,所述第一齿轮带动所述环型齿轮转动,环型齿轮带动环型转盘进行转动,即可调节所述倾斜摄像头32的位置,以更好的配合无人机进行拍摄测量,结构简单,符合使用所需;
24.参见图1
‑
图5,所述安装座1上还设有垂直摄像头42,所述安装座1上设有垂直安装座41,所述垂直安装座41与所述环型转盘2的轴心重合,所述垂直摄像头42设置在所述垂直安装座41上,结构简单,组装方便,符合使用所需;
25.参见图1
‑
图5,所述安装座1上还设有图像存储装置和控制器,所述控制器分别与所述第二驱动组件6和第一驱动组件5信号连接,所述控制器通过数据线分别与倾斜摄像头32、垂直摄像头42和图像存储装置连接,所述图像存储装置采用现有的仪器,其作用主要是将倾斜摄像头32、垂直摄像头42所拍摄到的图像进行存储,而控制器则负责控制第二驱动组件6和第一驱动组件5进行工作,对所述倾斜摄像头32所要倾斜的角度作为控制指令发生给第二驱动组件6和第一驱动组件5;
26.参见图1
‑
图5,所述安装座1的下端面上设有防护盖,所述防护盖与所述安装座1可拆卸连接,防护盖能在不使用的情况下组装在安装座下方,对倾斜摄像头32、垂直摄像头42进行包裹起到防护作用;
27.参见图1
‑
图5,所述安装座1的下端面上均布有多个减震支架7,所述减震支架7包括有固定套筒71,所述固定套筒71的下端面开口设置,在所述固定套筒71下部往上插接有减震柱73,所述减震柱73与所述固定套筒71内壁连接有减震弹簧72,所述减震柱73下端面上设有减震垫74,能在无人机降落时,起到一个缓冲的作用,对倾斜摄像头32、垂直摄像头42进行防护;
28.参见图1
‑
图5,所述减震垫74由橡胶垫和海绵垫组合而成;
29.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量;
30.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1