控制板的制作方法
1.本实用新型属于无人机遥控器附件,具体说是一种控制板,其主要适用于遥控器的外挂组件。
背景技术:
2.现有的无人机遥控器存在功能单一,左、右操纵杆灵敏度高,操控力度不易稳定掌握,航拍视频的画面经常出现时快时慢、不连贯的现象,没有记忆锁定功能,复杂的组合操控不可复制,无人机飞控软件需频繁设定参数,使用不方便等缺陷。
技术实现要素:
3.本实用新型的目的是提供一种控制板,可根据操控无人机的需要,在固定架组件上安装操控组件和不同功能、不同几何形状的模板、模套。通过采用模块化设计,实现了结构小型化,并具有重量轻、易于操作、携带方便、拆装快捷、成本低廉、遥控器操纵杆移动坐标可量化、无人机操控更直观准确等特点。
4.为实现上述目的,本实用新型提供了如下技术方案:该控制板,包括固定架组件(1)、操控组件(2)和手机支架组件(3),其技术要点是:固定架组件(1)包括通过衔接板(112)连接的带有刻度线的操控面板(111)和内板(113)、限位在操控面板(111)上且相互配合的碰珠(222)和可旋转的相机拨杆(221)、限位在操控面板(111)与内板(113)之间的圆形滑槽内的第一模板(115)和第二模板(117)、限位在第二模板(117)上的模套(116)。
5.进一步的,操控组件(2)滑动限位在固定架组件(1)上,其包括限位在固定架组件(1)上沿圆形滑槽滑动的滑块(211)、限位在滑块(211)上的微调螺杆(212)和第三模板(118)、与微调螺杆(212)配合的锁定螺母(216)和拖块(213)、通过端齿限位微调螺杆(212)的联轴器(214)、限位在操控面板(111)上相互配合的相机拨杆(221)和碰珠(222)。
6.进一步的,为方便将手机限位在操控面板(111)上,手机支架组件(3)包括与操控面板(111)一体的限位柱(311)、通过限位柱(311)限位的内设有弹簧(312)的支架体(313)、通过弹簧(312)弹性限位在支架体(313)内的夹紧杆(314)。
7.进一步的,操控组件(2)还包括设置在遥控器操纵杆上的橡胶阻尼帽(411)。
8.本实用新型的有益效果:整体技术方案采用模块化设计,通过测量遥控器操纵杆位置坐标制作的第一至第三模板、模套,可快速拆装,并适用不同规格的遥控器。通过各模块边缘的卡接结构实现与遥控器的夹紧锁定。利用左、右操纵杆可做任意角度移动的特性,根据需要在操控面板上选择嵌入用于特异化操控的不同形状的模板和模套;操控组件有锁定功能,可以锁定记忆操纵杆所在的位置。模板、模套和操控组件可单独或组合操控,即使是初学者,使操控杆沿第一模板和模套的不同几何形状滑动,即可飞出预设的飞行轨迹,使无人机能在三维空间飞出无限重复、精准复杂的飞行轨迹,如环绕、8字、四瓣梅花、渐开线等复杂组合飞行,从而降低了高难度操控的技术门槛。
9.旋转限位在滑块上的微调螺杆,通过拖块,可对遥控器操纵杆的移动进行微力精
准控制,利用滑块的t型槽可快速拆装,操控组件可依操控面板上的圆周刻度线,进行任意角度的调整,也可沿滑槽进行圆周移动。
10.通过联轴器同时控制两个微调螺杆,实现单指控双杆,即单指可同时进行左、右操纵杆的组合操控。
11.利用微调螺杆的螺距、涂有多种颜色的外齿和操控面板上的圆周刻度线,量化遥控器操纵杆的移动坐标,将遥控器操纵杆的移动距离数字化(优选螺距1mm,20齿/周,转动0.05mm/齿。涂多色更直观),可高精度准确操控无人机,初学者也能拍摄出高难度、高质量的航拍视频。
12.通过微调螺杆上的锁定螺母锁定拖块的位置,可快速拆装复制,可重复飞出锁定的飞行轨迹;也可根据记忆的坐标,直接在临界点操作(操纵杆有段空行程和开始动作的分界线);还可解放双手进行长时间的升降、长距离的耗时飞行,减少疲劳。
13.综上所述,本实用新型通过采用模块化设计,具有结构简单、功能多样、易于操作、组装拆卸快捷、塑料制作、成本低廉等优点。可量化遥控器操纵杆的移动坐标,用不同功能、不同几何形状的模板、模套和操控组件,可直观、细微、准确的组合操控无人机,飞出复杂的飞行轨迹,适合初学者使用。
附图说明
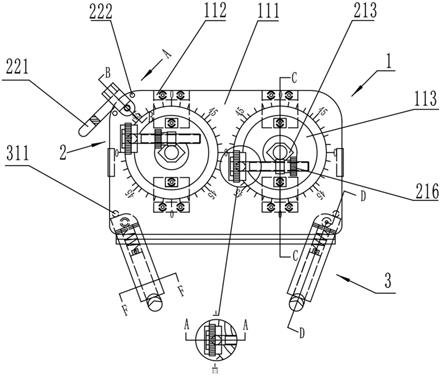
14.图1为本实用新型的其中一种实施方式的主视结构示意图。
15.图1a为图1沿a
‑
a线的剖视结构示意图。
16.图1b为图1沿b
‑
b线的剖视结构示意图。
17.图1c为图1沿c
‑
c线的剖视结构示意图。
18.图1d为图1沿d
‑
d线的剖视结构示意图。
19.图1e为图2沿e
‑
e线的剖视结构示意图。
20.图1f为图1沿f
‑
f线的剖视结构示意图。
21.图1g为图1沿a向的结构示意图。
22.图2为图1的侧视结构示意图。
23.图3为图1的俯视结构示意图。
24.图4为联轴器结构示意图。
25.图5为第一模板结构示意图。
26.图5a为图5沿g
‑
g线的剖视结构示意图。
27.图6为第一模板的结构示意图。
28.图7为第二模板的结构示意图。
29.图8为滑块的结构示意图。
30.图9为拖块的结构示意图。
31.图10为联轴器的结构示意图。
32.图11为微调螺杆的结构示意图。
33.图12为橡胶阻尼帽的使用状态示意图。
34.图13为橡胶阻尼帽的结构示意图。
35.图14为锁定螺母的结构示意图。
36.图15为模套的结构示意图。
37.图16为第三模板的结构示意图。
38.图16a为图16沿h
‑
h线的剖视结构示意图。
39.图17为第三模板的结构示意图。
40.图18为半圆槽直槽组合式结构示意图。
41.图18a为图18沿k
‑
k线的剖视结构示意图。
42.图19为固定式结构示意图。
43.图20为遥控器一体化示意图。
44.图21为无人机遥控器示意图。
具体实施方式
45.以下结合图1~21,通过具体实施例详细说明本实用新型的内容。该控制板,其主要包括固定架组件1、操控组件2和手机支架组件3。固定架组件1包括通过衔接板112连接的带有刻度线的操控面板111和内板113、限位在操控面板111上且相互配合的碰珠222和可旋转的相机拨杆221、限位在操控面板111与内板113之间的圆形滑槽内的第一模板115和第二模板117、限位在第二模板117上的模套116。操控组件2滑动限位在固定架组件1上,其包括通过螺栓215限位在固定架组件1上沿圆形滑槽滑动的滑块211、限位在滑块211上的微调螺杆212和第三模板118、与微调螺杆212配合的锁定螺母216和拖块213、通过端齿限位微调螺杆212的联轴器214、限位在操控面板111上相互配合的相机拨杆221和碰珠222。其中,微调螺杆212限位在滑块211的t型槽内。手机支架组件3包括与操控面板111一体的限位柱311、通过限位柱311限位的内设有弹簧312的支架体313、通过弹簧312弹性限位在支架体313内的夹紧杆314。手机支架组件3可通过旋转折叠的方式收纳在固定架组件1上。
46.工作原理:
47.通过卡紧板114,将固定架组件1限位在无人机遥控器上,拖块213的内孔限位在操纵杆上,旋转轴向、径向都限位在滑块211的t型槽内的微调螺杆212,带动拖块213往复直线移动,从而带动操纵杆移动,达到操控无人机的目的。操控面板111上有圆周刻度线,操控组件2可进行任意角度的调整,也可利用圆形滑槽带动操纵杆做圆周移动。微调螺杆212的一端有端面齿和外周齿,便于手动的外周齿面涂有多种颜色,起刻度识别作用。与微调螺杆212配合的锁定螺母216可以锁定拖块213,锁定后将微调螺杆212从滑块211的t型槽内取出,再次安装后即可飞出锁定时的飞行轨迹。
48.利用联轴器214两端的端面齿,啮合限位左右两个微调螺杆212,转动联轴器214可带动左右两个微调螺杆212同步旋转,从而带动左右两个拖块213向不同方向移动,单手指可同时对左右两个操纵杆进行联动组合操控,实现左、右环绕飞行。
49.固定架组件1可采用与遥控器的一体化结构、半圆滑槽式结构、直滑槽式结构、半圆槽直槽组合式结构、固定式结构。固定架组件1上可选择限位安装不同几何形状的第一模板115和第二模板117。模套116为第二模板117的配套零件,限位在第二模板117的孔内。左、右操纵杆可同时沿第一模板115或模套116内的不同几何形状做移动。
50.拨动限位在操控面板111上的相机拨杆221,使之移动一段空行程后,与设在临界点的碰珠222接触(临界点是空行程与开始动作的分界点;碰珠222有照相机即将开始俯仰
动作的提示作用和对相机拨杆221的移动起增阻降敏作用,便于细微精确操控),继续拨动相机拨杆221,利用橡胶垫圈224弹性变形,使其在碰珠222上移动,从而带动限位在相机拨杆221卡槽内的遥控器照相机俯仰拨盘拨扭移动,实现对无人机照相机的俯仰操控。
51.向外旋转展开限位在固定架组件1上的两个手机支架组件3至限位柱311限位,拉伸夹紧杆314,利用弹簧312将手机限位在手机支架组件3上。
52.橡胶阻尼帽411限位在遥控器操纵杆上,当操纵杆移动至临界点后有提示作用,利用橡胶弹性变形起增阻降敏作用,便于细微精确操控。可单独使用。
53.附图标记说明:
54.1固定架组件
55.111操控面板
56.112衔接板
57.113内板
58.114卡紧板
59.115第一模板
60.116模套
61.117第二模板
62.118第三模板
63.2操控组件
64.211滑块
65.212微调螺杆
66.213拖块
67.214联轴器
68.215螺栓
69.216锁定螺母
70.221相机拨杆
71.222碰珠
72.223铆钉
73.224橡胶垫圈
74.3手机支架组件
75.311限位柱
76.312弹簧
77.313支架体
78.314夹紧杆
79.411橡胶阻尼帽。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1