一种无人机航测设备安装架的制作方法
1.本实用新型涉及无人机技术领域,具体涉及一种无人机航测设备安装架。
背景技术:
2.航测无人机具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短的特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势,随着无人机和数码相机技术的发展,近年来,航测无人机被广泛应用于国家重大工程建设、灾害应、急与处理、国土监察、资源开发等领域。
3.现有的航测无人机都是采用固定的方式将航测设备安装在无人机机体下方的安装架上,因此使得航测设备无法单独更换;并且现有技术中的安装架无法适用于不同型号的航测设备,若需使用其他型号的航测设备,则需要整体更换安装架和航测设备,甚至需要整体更换无人机,从而提高了成本。
技术实现要素:
4.本实用新型根据现有的无人机的航测设备无法单独更换且安装架适用范围小的问题,本实用新型采用了如下的技术方案:
5.一种无人机航测设备安装架,包括与无人机的机体可拆卸连接的支撑机构以及设置在支撑机构内的矩形框,所述矩形框的任一开口端与支撑机构滑动相连,矩形框每一相邻的两侧壁之间均滑动相连,并且其中一相邻的两侧壁与支撑机构之间均连接有驱动机构,通过两驱动机构带动与其相连的矩形框侧壁滑动,以改变矩形框的内部空间大小。
6.相比于现有技术,本实用新型具有如下有益效果:使用时,将航测设备放入矩形框内,根据航测设备的大小,操作驱动机构驱动与之相连的矩形框侧壁滑动,使得航测设备与矩形框的四个侧壁均紧密贴合,通过矩形框的侧壁对航测设备进行夹持固定,能够适用于不同型号航测设备,也便于航测设备的更换,操作简单方便。
7.优选地,所述矩形框包括首尾依次滑动相连的第一侧壁、第二侧壁、第三侧壁以及第四侧壁,所述第一侧壁与支撑机构固定相连且与第四侧壁的内壁滑动相连,第二侧壁与第一侧壁的内壁滑动相连,第三侧壁与第二侧壁的内壁滑动相连且与支撑机构滑动相连,第四侧壁与第三侧壁的内壁滑动相连且与支撑机构滑动相连,两所述驱动机构一一对应连接在第二侧壁的外壁和第三侧壁的外壁与支撑机构之间。
8.优选地,所述支撑机构包括与无人机的机体可拆卸连接的连接板、位于连接板下方的支撑板以及沿竖直方向与连接板底部固定相连的背板,所述背板的一侧固定安装有“凵”形块,所述“凵”形块的底部与支撑板上部弹性相连,所述第一侧壁、第二侧壁、第三侧壁以及第四侧壁均位于“凵”形块内,两驱动机构一一对应连接在第二侧壁的外壁和第三侧壁的外壁与“凵”形块的内壁之间。
9.优选地,所述背板上沿第三侧壁的布置方向开设有第一滑槽且沿第四侧壁的布置方向开设有第二滑槽,所述第一侧壁与背板固定相连,所述第二侧壁与背板滑动相连,第三
侧壁与所述第一滑槽滑动相连,第四侧壁与所述第二滑槽滑动相连。
10.优选地,所述“凵”形块的底部内壁上开设有滑动槽,每一所述驱动机构均包括液压缸,其中与第二侧壁固定相连的液压缸与“凵”形块内壁固定相连,与第三侧壁固定相连的液压缸与滑动槽滑动相连,所述滑动槽与第一滑槽同向布置且位于与第三侧壁固定相连的液压缸远离第二侧壁的一侧。
11.优选地,所述支撑板上部开设有阶梯槽,所述阶梯槽的槽口宽度小于其槽底宽度,所述“凵”形块的底部滑动卡接在阶梯槽内,“凵”形块底部与阶梯槽槽底之间通过若干弹簧弹性相连。
12.优选地,所述“凵”形块两侧的外壁上对称固定安装有挡板,所述挡板与阶梯槽的大槽宽段的内壁滑动相连。
13.优选地,所述阶梯槽的槽底固定安装有一一对应位于若干弹簧内的垫块。
14.优选地,所述第一侧壁以及第四侧壁的外壁上均固定安装有压力传感器,且两所述压力传感器上均设有与之电连接的信号灯。
15.本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
16.图1为本实用新型一种实施例的正视图。
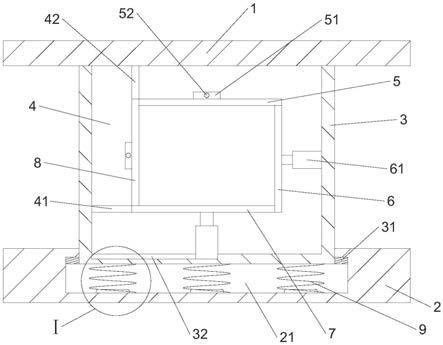
17.图2为图1的正剖图。
18.图3为图2中ⅰ的局部放大图。
19.图中标号依次为:1、连接板;2、支撑板;21、阶梯槽;22、垫块;3、“凵”形块; 31、挡板;32、滑动槽;4、背板;41、第一滑槽;42、第二滑槽;5、第一侧壁;51、压力传感器;52、信号灯;6、第二侧壁;61、液压缸;7、第三侧壁;8、第四侧壁;9、弹簧。
具体实施方式
20.为了使本实用新型实现的技术手段、创作特征、达成目的与作用更加清楚及易于了解,下面结合附图和具体实施方式对本实用新型作进一步阐述:
21.如图1
‑
2所示,本实用新型的实施例提供了一种无人机航测设备安装架,包括与无人机的机体可拆卸连接的支撑机构以及设置在支撑机构内的矩形框,所述矩形框的任一开口端与支撑机构滑动相连,矩形框每一相邻的两侧壁之间均滑动相连,并且其中一相邻的两侧壁与支撑机构之间均连接有驱动机构,通过两驱动机构带动与其相连的矩形框侧壁滑动,以改变矩形框的内部空间大小。
22.将航测设备放入矩形框内,根据航测设备的大小,操作驱动机构驱动与之相连的矩形框侧壁滑动,使得航测设备与矩形框的四个侧壁均紧密贴合,通过矩形框的侧壁对航测设备进行夹持固定,能够适用于不同型号航测设备,便于航测设备的更换,操作简单方便。
23.如图2所示,根据本实用新型的另一实施例,所述一种无人机航测设备安装架,对其包括的矩形框进一步优化,所述矩形框包括首尾依次滑动相连的第一侧壁5、第二侧壁6、第三侧壁7以及第四侧壁8,所述第一侧壁5与支撑机构固定相连且与第四侧壁8的内壁滑动
相连,第二侧壁6与第一侧壁5的内壁滑动相连,第三侧壁7与第二侧壁6的内壁滑动相连且与支撑机构滑动相连,第四侧壁8与第三侧壁7的内壁滑动相连且与支撑机构滑动相连,两所述驱动机构一一对应连接在第二侧壁6的外壁和第三侧壁7的外壁与支撑机构之间;优选地,所述支撑机构包括与无人机的机体可拆卸连接的连接板1、位于连接板 1下方的支撑板2以及沿竖直方向与连接板1底部固定相连的背板4,所述背板4的一侧固定安装有“凵”形块3,所述“凵”形块3的底部与支撑板2上部弹性相连,所述第一侧壁5、第二侧壁6、第三侧壁7以及第四侧壁8均位于“凵”形块3内,两驱动机构一一对应连接在第二侧壁6的外壁和第三侧壁7的外壁与“凵”形块3的内壁之间,并且所述背板4上沿第三侧壁7的布置方向开设有第一滑槽41且沿第四侧壁8的布置方向开设有第二滑槽42,所述第一侧壁5与背板4固定相连,所述第二侧壁6与背板4滑动相连,第三侧壁7与所述第一滑槽41滑动相连,第四侧壁8与所述第二滑槽42滑动相连。
24.将航测设备放在第三侧壁7的内壁上,根据航测设备的大小,驱动两驱动机构带动第二侧壁6沿第一侧壁5内壁滑动以及第三侧壁7沿第一滑槽41和第二侧壁6的内壁滑动,并且通过第三侧壁7推动第四侧壁8沿第二滑槽42滑动,从而使得航测设备与第一侧壁5、第二侧壁6、第三侧壁7以及第四侧壁8的内壁均贴合,最终将航测设备固定;需要更换航测设备时,则通过两驱动机构带动第二侧壁6以及第三侧壁7反向滑动,将航测设备取出更换即可;并且优选地,所述第一侧壁5、第二侧壁6、第三侧壁7以及第四侧壁8的内壁均由防滑材料制成,保证航测设备与四个侧壁之间具有较大的摩擦力,使航测设备在航测过程中不易滑落。
25.如图2所示,根据本实用新型的另一实施例,所述一种无人机航测设备安装架,对其包括的驱动机构进一步优化,所述“凵”形块3的底部内壁上开设有滑动槽32,每一所述驱动机构均包括液压缸61,其中与第二侧壁6固定相连的液压缸61与“凵”形块3内壁固定相连,与第三侧壁7固定相连的液压缸61与滑动槽32滑动相连,所述滑动槽32与第一滑槽41同向布置且位于与第三侧壁7固定相连的液压缸61远离第二侧壁6的一侧;通过两个液压缸61对第二侧壁6和第三侧壁7提供动力进行滑动,同时第三侧壁7沿第一滑槽41滑动时,带动与第三侧壁7固定相连的液压缸61在滑动槽32内滑动。
26.如图2所示,根据本实用新型的另一实施例,所述一种无人机航测设备安装架,对其包括的支撑板2进一步优化,所述支撑板2上部开设有阶梯槽21,所述阶梯槽21的槽口宽度小于其槽底宽度,所述“凵”形块3的底部滑动卡接在阶梯槽21内,“凵”形块3的底部与阶梯槽21槽底之间通过若干弹簧9弹性相连,当无人机完成航测工作后返航着陆,通过若干弹簧9来减轻无人机着陆时的冲击力,防止“凵”形块3以及其内的航测设备在着陆过程中受到颠簸过大而损坏;并且优选地,所述“凵”形块3两侧的外壁上对称固定安装有挡板31,所述挡板31与阶梯槽21的大槽宽段的内壁滑动相连,使得“凵”形块3 在阶梯槽21内滑动时,通过挡板31与阶梯槽21的内壁卡接,防止“凵”形块3与阶梯槽21脱离。
27.如图3所示,根据本实用新型的另一实施例,所述一种无人机航测设备安装架,优选地,所述阶梯槽21的槽底固定安装有一一对应位于若干弹簧9内的垫块22,所述垫块22 由弹性材料制成,能够有效减缓无人机着陆时,“凵”形块3压缩弹簧9后对于阶梯槽21 槽底的撞击力,防止“凵”形块3以及阶梯槽21的损坏,并且还能防止“凵”形块3过度压缩弹簧9对造成弹簧9损坏。
28.如图2所示,根据本实用新型的另一实施例,所述一种无人机航测设备安装架,优
选地,所述第一侧壁5以及第四侧壁8的外壁上均固定安装有压力传感器51,且两所述压力传感器51上均设有与之电连接的信号灯52;通过压力传感器51来监测两液压缸61通过航测设备对第一侧壁5和第四侧壁8施加的压力大小,并且通过信号灯52进行提示,使得操作人员能及时停止两液压缸61,防止两液压缸61的驱动力过大而使第一侧壁5和第四侧壁8损坏。
29.本实用新型的使用原理为:本实用新型使用时,将航测设备放在第三侧壁7的内壁上,根据航测设备的大小,驱动与第二侧壁6固定相连的液压缸61带动第二侧壁6沿第一侧壁5的内壁滑动,同时推动第三侧壁7在第一滑槽41内滑动,而且还带动与第三侧壁7 固定相连的液压缸61在滑动槽32内滑动,并且驱动与第三侧壁7固定相连的液压缸61 带动第三侧壁7沿第二侧壁6的内壁滑动,第三侧壁7滑动过程中推动第四侧壁8沿第二滑槽42内滑动,从而通过第一侧壁5、第二侧壁6、第三侧壁7以及第四侧壁8将航测设备夹持固定;通过压力传感器51来监测液压缸61的推动力对第一侧壁5和第四侧壁8施加的压力大小,并且通过信号灯52进行提示,使得操作人员能及时停止两液压缸61,防止两液压缸61的驱动力过大而使第一侧壁5和第四侧壁8损坏;同时当无人机完成航测工作后返航着陆,通过阶梯槽21内的若干弹簧9来减轻无人机着陆时的冲击力,防止“凵”形块3以及其内的航测设备在着陆过程中受到颠簸过大而损坏。
30.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1