包括辅助机械驱动系统的飞行器混合动力推进链的制作方法
1.本发明涉及飞行器推进领域,该飞行器包括由非推进发电涡轮机供电的若干推进转子。
背景技术:
2.已知地,已提出为飞行器配备包括非推进发电涡轮机、电池以及多个电驱动转子的混合动力推进系统。该混合动力推进系统可以在实现货品和货物最佳运输的同时减少噪音污染和燃料消耗。
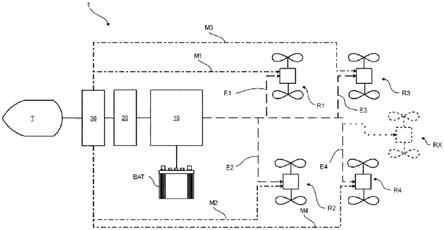
3.参考图1,其示出了现有技术的飞行器的混合动力推进链100。在该示例中,混合动力推进链100包括多个由配电模块110供电的推进转子r1-r4,该配电模块一方面由非推进涡轮机t通过发电系统120供电,另一方面通过电池bat供电。每个推进转子r1-r4通过一个或多个供电总线e1-e4连接到电力分配模块110。
4.实践中,相对于正常运行需求量,电池bat必须超量配置,以便能够在临时需要(例如起飞阶段和着陆阶段)或特殊需要(例如规避动作或绕行阶段)或推进链的某个元件出现故障或不可用时提供额外的电能。就目前电化学电池的功率重量密度而言,电池bat的超量配置会导致电池体积的增大,从而限制了飞行器运载乘客或货物的负载能力。
5.本发明的目的之一是提供一种混合动力推进链,用于在意外需要的情况下或在推进链元件故障或不可用的情况下提供附加的机械能,在减小体积的同时而不致于降低运载乘客或货品的能力。
6.顺便提及,已知一种飞行器,其一方面包括机械驱动的推进转子,另一方面包括电驱动的推进转子。
7.专利us 2019/061924 a1公开了一种由多个推进转子组成的推进链,推进链由涡轮机驱动,该多个推进转子通过行星式齿轮箱进行机械驱动。专利us2018/037333a1公开了一种混合动力推进链,其包括对电动机供电的发电机。
技术实现要素:
8.本发明涉及一种用于飞行器的混合动力推进链,该混合动力推进链包括多个通过电连接件与配电模块电连接的推进转子,该配电模块一方面通过发电系统与非推进涡轮机连接,另一方面与电池电连接,每个推进转子包括定子和至少一个转轴,该转轴被配置为,当定子由至少一个电连接件供电时相对于定子转动。
9.本发明的显著之处在于,该混合动力推进链包括与非推进涡轮机机械连接的辅助机械驱动系统,该辅助机械驱动系统包括多个用于以机械方式驱动推进转子的至少一个转轴转动的机械连接件。
10.非推进涡轮机是指在正常运行时不通过推进器直接提供推进力的涡轮机。与之对照的是配有涡扇的涡轮机。辅助系统是指仅在需要时处于激活状态的系统。根据定义,术语辅助装置对应于“除某物以外的暂时性或从属性的其他物”。
11.借助于本发明,如果混合动力推进链发生故障而不存在非推进涡轮机不可用的情况下,可以有利地从非推进涡轮机中汲取机械动力,以便经机械连接件驱动一个或多个推进转子。既不会像采用重复或冗余电池那样使重量显著增加,推进链的可靠性也得以提高。有利地,可以伴随性地使用机械连接和电连接,以便为推进转子提供附加的推进动力,例如起飞或着陆期间,执行躲避动作等。
12.优选地,该发电系统包括机械分配模块,该机械分配模块的输入端与非推进涡轮机机械连接,其输出端与至少一个电流发生器机械连接。该辅助机械驱动系统与机械分配模块连接。由此,该辅助机械驱动系统与发电系统集成于一体,从而减小了整体尺寸和重量。
13.进一步优选地,该辅助机械驱动系统的机械连接件与机械分配模块连接,并形成辅助机械驱动系统的输出端。有利地,机械分配模块设有用于与电流发生器连接的输出端和用于与机械连接件连接的输出端,该结构是紧凑的。
14.优选地,该混合动力推进链包括机械分配模块,该机械分配模块的输入端与非推进涡轮机机械连接,其输出端一方面与发电系统机械连接,另一方面与辅助机械驱动系统机械连接。由此,该辅助机械驱动系统间接地与非推进涡轮机机械连接。有利地,机械分配模块使得可以实现对机械推进和电推进使用的控制。
15.根据一个方面,各机械连接件分别通过可控耦合装置与各推进转子的转轴一一对应连接。这有利地使得可以仅在需要时控制机械驱动器,优选地提供冗余。
16.优选地,可控耦合装置被配置为,当推进转子由电连接件供电且推进转子的转轴的速度相对于其设定速度下降时,可控耦合装置自动被激活。因此,该耦合装置在发生故障时提升了安全性。速度下降是指在约1秒钟的时间段内,额定速度减少约5%-10%。
17.根据一个方面,该可控耦合装置包括至少一个飞轮。有利地,这种飞轮使得能够在速度减少的情况下执行自动耦合。
18.根据另一方面,该可控耦合装置包括至少一个第一摩擦件和至少一个第二摩擦件。
19.根据一个方面,每个推进转子包括至少一个推进涡扇,优选地是两个反向旋转的推进涡扇。
20.本发明还涉及一种包括前文所述的混合动力推进链的飞行器。
21.本发明还涉及一种使用前文阐述的飞行器的方法,该方法包括:
22.通过电连接件驱动多个推进转子;
23.在发电系统部分或完全不可用的情况下,通过至少一个机械连接件驱动至少一个所述推进转子。
附图说明
24.为了更清楚地说明本发明实施例的技术方案,下面对实施例描述中所需要使用的附图作简单地介绍,在附图中,相同的标号用以指示相似的对象,其中:
25.图1是现有技术的飞行器的混合动力推进链的示意图;
26.图2是本发明第一实施例的飞行器的混合动力推进链的示意图;
27.图3是本发明第二实施例的飞行器的混合动力推进链的示意图;
28.图4是图3的混合动力推进链的发电系统的示意图;
29.图5是本发明配备有第一种可控耦合系统的推进转子的剖视图;
30.图6是本发明配备有第二种可控耦合系统的推进转子的剖视图;
31.图7是本发明包括两个反向旋转推进涡扇的推进转子的剖视图;以及
32.图8是本发明第三实施例的飞行器的混合动力推进链的示意图。
33.应当注意,这些附图以详细方式阐述本发明以实现本发明,当然所述附图能够在必要的情况下用于更好地界定本发明。
具体实施方式
34.参考图2,其示出了飞行器的混合动力推进链1的一个实施例。在该实施例中,混合动力推进链1包括多个通过电连接件e1-e4与配电模块10电连接的推进转子r1-r4,配电模块10一方面通过发电系统20与非推进涡轮机t连接,另一方面与电池bat电连接。电池bat,既是指单个电池bat,也指一组若干电池bat。
35.非推进式涡轮机t可采用多种形式,具体为固定式涡轮燃气轮机、自由式涡轮燃气轮机、活塞式引擎等。有利地,非推进涡轮机t是热能的。
36.在本实施例中,示出了4个推进转子r1-r4,但不言而喻,推进转子的数量可以有所不同。如图2所示,可以增加推进转子rx。如图5和图6所示,稍后将详细阐述,每个推进转子r1-r4具有定子30和转轴32,该转轴被配置为在定子30通电时相对于定子30绕轴线xs转动。每个推进转子r1-r4包括与转轴32连接的推进涡扇(未示出)。在该实施例中,每个推进转子r1-r4包括与转轴32一体安装的转子31。转子31磁耦合到定子30以形成例如永磁同步、与绕线转子同步、异步或磁阻型等的电动机。
37.参考图7,根据本发明的一个方面,每个推进转子rc具有两个反向旋转的推进涡扇。例如,转轴32驱动安装有第二涡扇的第二转轴。此外,每个涡扇可被包覆或可不被包覆,且为可转向或不可转向的。可选地,每个推进转子r1-r4可包括电转换器,如逆变器。
38.配电模块10对于本领域技术人员来说是众所周知的,并且能够根据推进转子r1-r4的需要、电池bat的充电水平以及飞行器的工作状况等来管理电池bat和发电系统20的电力资源。配电模块10通过一个或多个电连接件e1-e4与每个推进转子r1-r4电连接。优选地,配电模块10包括电力电子转换器、确保传输电流的驱动或非驱动件(接线盒,继电器...)以及确保货品和人员安全的驱动或非驱动件(断路器,保险丝...),电力电子转换器用于在必要时作为发电系统20的输出端调整电压的电平和形式(ac/dc)。
39.在该实施例中,每个电连接件e1-e4呈供电总线的形式,但不言而喻,可采用不同的形式。优选地,每个电连接件e1-e4包括电气保护装置,具体为保险丝、断路器、接触器等。
40.参考图5-6,电连接件e1-e4分别向推进转子r1-r4的定子30供电,以便以磁力方式驱动转子31转动。由于转子31与转轴32及涡扇一体成型,涡扇因而也随之转动,从而向推进转子r1-r4提供推力。
41.已知地,发电系统20包括一个或多个电流发生器以及一个或多个转换器,具体为ac-dc型转换器。例如,电流发生器可以采用永磁同步电机、具有绕线转子的同步电机或异步电机的形式。类似地,转换器可以采用如无源二极管整流器、被动有源整流器等或可逆逆变器的形式。
42.根据本发明,参考图2,混合动力推进链1包括与非推进涡轮机t机械连接的辅助机械驱动系统30。该辅助机械驱动系统30包括多个机械连接件m1-m4,各机械连接件m1-m4用于以机械方式驱动对应的推进转子r1-r4的转轴32转动。优选地,各机械连接件m1-m4均采用驱动轴的形式,该驱动轴适于由非推进涡轮机t驱动其转动。
43.换言之,在该实施例中,每个推进转子r1-r4一方面连接到对应的电连接件e1-e4以接收电推力,另一方面连接到对应的机械连接件m1-m4以接收机械推力。因此,每个推进转子r1-r4都是冗余的,以便提高混合动力推进链1的可靠性。
44.根据本发明的第一实施例,参照图2,辅助机械驱动系统30不同于发电系统20。
45.优选地,如图2所示,发电系统20与辅助机械驱动系统30连接,该辅助机械驱动系统30被配置为输出用于发电系统20的第一机械转矩以及用于驱动机械连接件m1-m4的第二机械转矩。这种辅助机械驱动系统30也被称为“辅助传动装置”。
46.根据本发明的第二实施例,参照图3,辅助机械驱动系统30与发电系统20一体成型。这种一体化设计使得整体尺寸和重量得以减小。换句话说,功率输出装置集成于发电系统20。
47.例如,参考图4,发电系统20包括多个电流发生器g1、g2、gn以及多个转换器conv1、conv2、convn,以便向配电模块10供电。发电系统20还包括机械分配模块40,该机械分配模块40包括被配置为从非推进涡轮机t接收输入性机械转矩的输入端e以及向电流发生器g1、g2、gn提供基本机械转矩以产生电能的多个第一输出端s1。
48.在该实施例中,机械分配模块40还包括多个第二输出端s2,用于向机械连接件m1-m4提供基本机械转矩以驱动机械连接件m1-m4转动。换言之,机械分配模块40使得一方面能够提供机械能以间接向电连接件e1-e4赋能,另一方面提供机械能以直接向机械连接件m1-m4赋能。由此,辅助机械驱动系统30直接连接到机械分配模块40。
49.在该实施例中,机械分配模块40包括多个齿轮,并且优选地采用齿轮系的形式。
50.根据一方面,机械分配模块40是可控的,以根据工作状况激活/停用第二输出端s2。如稍后将阐述的,第二输出端s2优选地在发电故障的情况下或在有额外推进功率需求时被激活。额外的功率需求是指功率需求大于额定电功率的100%,优选小于额定电功率的130%。
51.为了实现可控,机械分配模块40包括可控制去耦系统,例如离合器、液压式耦合器,爪形离合器型等。
52.根据另一个实施例,参考图8,混合动力推进链1包括机械分配模块40',该机械分配模块40'的输入端与非推进涡轮t机机械连接,其输出端一方面与发电系统20机械连接,且另一方面与辅助机械驱动系统30机械连接。由此,辅助机械驱动系统30间接地与非推进涡轮机t机械连接。优选地,发电系统20和辅助机械驱动系统30保持独立。该结构是并列的。
53.优选地,各机械连接件m1-m4分别通过可控耦合装置与各推进转子r1-r4的转轴32一一对应连接,使得对转子r1-r4的转轴32的驱动可以通过机械连接件m1-m4来启动或停用。
54.举例来说,参考图5和图6,其示出了推进转子r1,该推进转子r1包括与电连接件e1电连接的定子30,以及被配置为在定子30通电时相对定子30转动的转轴32。转轴32经由可控耦合装置4与机械连接件m1连接,以机械地实现或切断机械连接件m1和转轴32之间的耦
合。
55.参考图5,根据第一实施例,可控耦合装置4包括飞轮40。有利地,这使得可以根据机械连接件m1与转轴32的相对速度来实现耦合。举例来说,电连接件e1驱动转轴32的速度高于机械连接件m1的速度时,飞轮40不执行耦合。当电连接件e1停止时,机械连接件m1的转速大于转轴32的转速,飞轮40则执行机械连接件m1与转轴32的机械耦合。
56.有利地,当转轴32的速度相对于其设定速度下降时,可控耦合装置4被激活。优选地,混合动力推进链1被配置为以推进转子r1-r4的设定转速驱动每个机械连接件m1-m4。因此,在有机械驱动的情况下,效果最佳。优选地,混合动力推进链1被配置成以高于机械连接件m1-m4的转速的速度(即高于推进转子r1-r4的设定转速)电驱动每个推进转子r1-r4。优选地,该转速比设定转速高出几个百分点,例如,高出约为3%。
57.有利地,由于速度差小,在供电故障的情况下,机械连接件m1-m4以平滑无障碍的方式自动接替。
58.参考图6,根据第二实施例,可控耦合装置4包括与机械连接件m1一体成型的第一摩擦件41,以及与转轴32一体成型的第二摩擦件42,第二摩擦件42被配置为当机械连接件m1与转轴32机械耦合时与第一摩擦件41协同运行。当机械连接件m1与转轴32未机械耦合时,第一摩擦件41远离第二摩擦件42。这种离合器系统在运输车辆领域是众所周知的。
59.不言而喻,机械连接件m1还可以与转轴32直接接合,例如,通过角传动或万向结合件。
60.现将阐述混合动力推进链1的实施例。
61.在混合动力推进链1的正常工作期间,非推进涡轮机t产生电能,并通过电连接件e1-e4对推进转子r1-r4供电。在此工作期间,机械连接件m1-m4未被激活。
62.在混合动力推进链1故障而不存在非推进涡轮机t不可用(具体为发电故障)的情况下,可以有利地从非推进涡轮机t中汲取机械动力,从而经由已被激活的机械连接件m1-m4来驱动一个或多个推进转子r1-r4。
63.有利地,可伴随性地使用机械连接件m1-m4和电连接件e1-e4,以便为推进转子r1-r4提供附加的推进动力,例如在起飞或着陆期间,执行躲避动作等。
64.借助于本发明,这种混合动力推进链1使得重量得以减小,从而较之增添新的电池bat相比,提高了可用性和可靠性。由于本质上是基于机械部件,因此这种辅助机械驱动系统30的可靠性是得到验证的。有利地,通过使用辅助机械驱动系统30,能够减少电池bat的重量,从而满足不同的推进需求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1