用于电动机轴的锁定指状件的制作方法
1.本发明涉及航空领域中的轴锁定系统的领域,并且更具体地涉及用于飞行器螺旋桨的轴的锁定。
背景技术:
2.已知垂直起飞的飞行器,包括用于执行基本上垂直飞行阶段的一个或者几个螺旋桨和用于执行基本上横向飞行阶段的推进装置。因此,这种飞行器适于在保持类似于常规飞行器的巡航能力的同时,垂直地起飞和/或者着陆(这消除了对长的起飞/着陆跑道的需要)。可以在图1a中看到这种飞行器。
3.当这种飞行器执行除了垂直飞行阶段之外的飞行阶段时,这倾向于沿着基本上垂直于飞行器的螺旋桨中的一个的旋转轴线的方向产生气体流动。例如,在巡航阶段期间,流动可以基本上垂直于在起飞和/或着陆阶段期间所使用的螺旋桨中的一个的旋转轴线。
4.这个流动可以引起螺旋桨的旋转。当螺旋桨不是由电机驱动时,这被称为螺旋桨的自由旋转(或者风车旋转)。因此,可变力可以由螺旋桨传递到飞行器,这可以干扰飞行器的稳定性,特别是当从一个电机(或者螺旋桨)到另一个电机(或者螺旋桨)的这些变化是不可以预测的和/或非均匀的时。
5.此外,这种旋转可以增加飞行器的空气动力学阻力,这对飞行器的能量效率是有害的。
6.为了克服这些问题,已知的是通过对其施加电机转矩来锁定螺旋桨。由这种转矩的施加所引起的能量消耗影响飞行器在飞行中的能量效率。
技术实现要素:
7.因此,本发明旨在至少部分地解决这些问题,并且因此提出了一种飞行器,包括由电机驱动旋转的主螺旋桨,电机具有相对于彼此沿着旋转轴线能旋转移动的第一组件和第二组件,主螺旋桨旋转地固定到所述第一组件和第二组件中的一个,所述飞行器包括锁定系统,锁定系统包括凹部和导引元件,凹部形成在第一组件和第二组件中的一个中,导引元件固定到第一组件和第二组件中的另一个,锁定系统具有接合构造和自由构造,在接合构造中,导引元件至少部分地插入到凹部中,在自由构造中,导引元件不至少部分地插入到凹部中,锁定系统被构造成使得在接合构造中,第一组件相对于第二组件的旋转移动被限定于预定的角扇区,例如小于5
°
或者例如小于1
°
,锁定系统被构造成当电机在第一组件上或者在第二组件上施加大于转矩阈值的旋转转矩时,从接合构造切换至自由构造,其特征在于,第一组件和第二组件相对于彼此沿着由旋转轴线所限定的平移方向,在闲置位置与工作位置之间能平移的移动,并且其特征在于,仅当第一组件和第二组件处于闲置位置中时,锁定系统可以处于接合构造中。
8.根据一个实施例,导引元件包括能够被引入凹部中的滚动元件。
9.根据一个实施例,飞行器被构造成使得在由电机驱动主螺旋桨期间所产生的推力
抵抗第一组件和第二组件从工作位置到闲置位置的切换。
10.根据一个实施例,锁定系统包括返回装置,该返回装置在第一组件和第二组件处于闲置位置中时,倾向于将导引元件插入到凹部中。
11.根据一个实施例,返回装置包括支撑弹簧和校准螺钉,该支撑弹簧用于将导引元件和凹部中的一个推向另一个,该校准螺钉与支撑弹簧配合,以修改返回装置的刚度。
12.根据一个实施例,导引元件沿着基本上垂直于旋转轴线的插入方向插入到凹部中,并且当第一组件和第二组件处于闲置位置中时,返回装置倾向于将导引元件插入到凹部中。
13.根据一个实施例,导引元件沿着平行于或者基本上平行于旋转轴线的插入方向插入到凹部中,并且当锁定系统离开接合构造时,第一组件和第二组件离开闲置位置。
14.根据一个实施例,锁定系统包括几个凹部。
15.根据一个实施例,锁定系统包括的凹部的数量等于主螺旋桨的桨叶的数量。
16.根据一个实施例,锁定系统包括的导引元件的数量小于主螺旋桨的桨叶的数量。
17.因此,所提出的飞行器可以克服影响已知飞行器的不稳定性和/或者能量无效率,因为其主螺旋桨的锁定和解锁可以不用发动机实施。
附图说明
18.图1a是一种已知的飞行器。
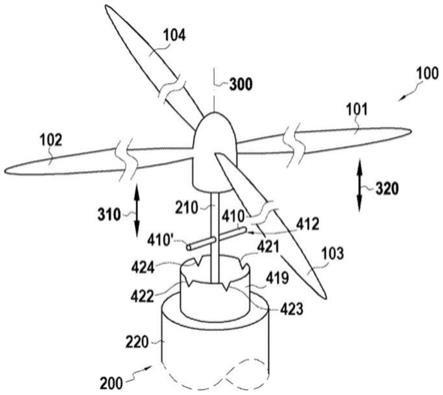
19.图1b是根据本发明的飞行器。
20.图1c示出了根据第一构造的电机、主螺旋桨和锁定系统。
21.图1d示出了根据第二构造的电机、主螺旋桨和锁定系统。
22.图2a-2b示出了主螺旋桨、用于图1c中所示构造的锁定系统以及电机,该电机的第一组件和第二组件分别地处于第一位置(图2a)和第二位置(图2b)的。
23.图2c-2d示出了主螺旋桨、用于图1d中所示构造的锁定系统以及电机,该电机的第一组件和第二组件分别地处于第一位置(图2c)和第二位置(图2d)。
24.图3a-3b分别地示出了图2a-2d(图3a)中所示的锁定系统及其带有替代性部件的变体(图3b)。
25.图4a-4b示出了主螺旋桨、用于图1c中所示构造的锁定系统以及电机,该电机的第一组件和第二组件分别地处于第一位置(图4a)和第二位置(图4b)。
26.图4c示出了主螺旋桨、用于图1d中所示构造的锁定系统以及电机,其第一组件和第二组件处于第二位置中。
27.图5示出了主螺旋桨、锁定系统和电机,该电机的第一组件和第二组件处于第二位置中。
具体实施方式
28.图1b示出了在基本上垂直于飞行器的主螺旋桨100的旋转轴线的位移期间,根据本发明的飞行器。该位移可以倾向于产生沿着基本上垂直于飞行器的主螺旋桨100的旋转轴线的方向“e”气体流动。飞行器可以包括一个或者几个主螺旋桨100。例如,图1b中所示的飞行器包括四个主螺旋桨。
29.作为示例,飞行器可以包括用于使飞行器基本上垂直于主螺旋桨100的旋转轴线移动的横向推力装置。该横向推力装置可以包括例如,次螺旋桨999,其旋转轴线998基本上垂直于主螺旋桨100的旋转轴线,如图1b中所示。
30.根据本发明的飞行器可以构造成当主螺旋桨100不由图1c和1d中特别地示出的电机200驱动时,在基本上垂直于主螺旋桨100的旋转轴线的方向上滑翔。在这种情况下,飞行器可以不包括横向推力装置。
31.根据一个实施例,电机200可以是电动机。
32.如图1c中所见,电机200具有第一组件210和第二组件220,它们相对于彼此沿着旋转轴线300能旋转移动。主螺旋桨100可以旋转地固定到所述第一组件210和第二组件220中的一个。
33.例如,第二组件220包括电机200的定子,并且第一组件210包括电机200的转子。定子包括例如,电机200的外壳,并且转子包括例如,主螺旋桨100的旋转轴。旋转轴线300可以与主螺旋桨100的轴重合或者基本上重合。
34.通常,第一组件210和第二组件220相对于彼此沿着平移方向320,在闲置位置与工作位置之间,能平移的移动。例如,通过由主螺旋桨100产生推力或者通过停止该推力产生可以引起该平移。例如,平移的方向320可以与旋转轴线300重合。例如,闲置位置是在无主螺旋桨100的推力时采用的转子(或者主螺旋桨100的轴)相对于定子(或者外壳)的位置,并且工作位置是由主螺旋桨100产生推力期间采用的转子(或者主螺旋桨100的轴)相对于定子(或者外壳)的位置。
35.第一组件210和第二组件220的平移移动限定了第一组件210和第二组件220的平移冲程,该平移冲程可以在2mm或者更大的数量级上、或者包括在2mm与8mm之间。根据一个实施例,该冲程对应于电机200的轴向间隙。通常,可以根据需要预定义该平移冲程。
36.通常,当电机200驱动主螺旋桨100时,主螺旋桨100产生倾向于使主螺旋桨100更靠近电机200(或者飞行器),或者使主螺旋桨100远离电机200(或者飞行器)移动的推力。当推力倾向于使主螺旋桨100远离电机200(或者飞行器)移动时,这称为“牵引”构造;当推力倾向于使它们彼此靠近时,这称为“推进”。
37.飞行器包括锁定系统400,当电机200和主螺旋桨100在牵引构造中配合时,锁定系统400可以设置在电机200和主螺旋桨100之间。如图1d中所见,当电机200和主螺旋桨100在推进构造中配合时,电机200可以设置在锁定系统400和主螺旋桨100之间。
38.通常,锁定系统400具有接合构造和自由构造。在接合构造中,第一组件210相对于第二组件220的旋转移动可以限定于小于5
°
的角扇区。更特别地,在调节和校准之后,第一组件210相对于第二组件220的旋转移动可以限定于小于1
°
的角扇区。因此,可以将由主螺旋桨100施加到飞行器的力限定在一组预定的值或者值范围,和/或将这些力的变化性减小到最小。当第一组件210和第二组件220处于闲置位置时,锁定系统400可以切换到接合构造。当第一组件210和第二组件220处于工作位置时,锁定系统400不能切换到接合构造中。
39.通常,飞行器可以构造成使得在由电机200驱动主螺旋桨100期间所产生的推力抵抗第一组件210和第二组件220从工作位置到闲置位置的切换。因此,该推力可以抵抗锁定系统400到接合构造中的切换。
40.当电机200在第一组件210上或者在第二组件220上施加大于转矩阈值的旋转转矩
时,锁定系统400可以从接合构造切换至自由构造。例如,该转矩可以是起动转矩。
41.如图2a中所见,锁定系统400通常包括凹部420和导引元件410。凹部420的形状可以基本上对应于导引元件410的形状。
42.例如,在图3a中,凹部420具有凹形底表面,该凹形底表面在此是半圆形的(例如,基本上球形/半球形的表面或者基本上圆柱形/半圆柱形表面),其半径大于导引元件410的对应的凸形表面的半径。当凹部420的凹形表面是基本上半圆柱形或者圆柱形时,导引元件410的对应的凸形表面可以是基本上球形/半球形或者基本上圆柱形/半圆柱形。当凹部420的凹形表面是球形或者半球形时,导引元件410的对应的凸形表面可以是球形或者半球形。
43.凹部420的底表面可以通过截头圆锥形表面或者平坦表面连接至圆柱部件419的圆周表面上,或者可以直接地接合圆柱部件419的圆周表面。
44.例如,在图4b中,导引元件410是凸耳,并且凹部420是槽口,该槽口具有与凸耳的形状互补的形状,并且凸耳的全部或者一部分接合在槽口中。
45.例如,在图5中,导引元件410是杆,并且凹部421是槽口,该杆被容纳在该槽口中。
46.通常,凹部420可以形成于第一组件210和第二组件220中一个上或者一个其中,并且导引元件410可以固定到第一组件210和第二组件220中另一上或者另一个其中。
47.例如,在图5中,凹部421形成在第二组件220上或者其中,并且导引元件410固定到第一组件210上。在图2a中,凹部420形成于第一组件210上或者中,并且导引元件410固定到第二组件220。
48.通常,在接合构造中,导引元件410的至少一部分插入到凹部420中。相反地,在自由构造中,导引元件410没有至少部分地插入到凹部420中,如图2b所见。
49.通常,当第一组件210和第二组件220处于工作位置时,凹部420和导引元件410沿着平移方向320彼此远离地移动。如图2a所示,当第一组件210和第二组件220处于闲置位置时,使凹部420和导引元件410沿着平移方向320彼此靠近。
50.通常,如图2a-2d所见,当凹部420与导引元件410的分离由主螺旋桨100与电机200的分离引起时,锁定系统400可以考虑为被构造用于牵引构造,并且当凹部420与导引元件410的分离由主螺旋桨100与电机200的接近引起时,锁定系统400可以考虑为被构造用于推进构造。
51.如图2a-2b中所见,在牵引构造中,主螺旋桨100远离电机200(或者远离飞行器)的平移也可以通过将电机200的第一组件210和第二组件220切换到工作位置,移动凹部420远离导引元件410。如图2c-2d中可见,在推进构造中,根据靠近电机200(或者飞行器)的主螺旋桨100的平移可以通过将电机200的第一组件210和第二组件220切换到工作位置,移动使凹部420远离导引元件410(或者反之亦然)。
52.当电机200和主螺旋桨100以两种构造配合时,电机200和锁定系统400相对于主螺旋桨100的两种布置是可以能的。一般而言,通过在平移方向320上反转凹部420和导引元件410的定向,构造用于牵引构造的锁定系统400可以被重新构造用于推进构造(或者反之亦然)。因此,主螺旋桨100远离电机200(或者飞行器)的平移可以在牵引构造期间沿着平移方向320在第一方向上移动凹部420远离导引元件410,并且主螺旋桨100朝向电机200(或者朝向飞行器)的平移可以在推进构造期间沿着与第一方向相反的平移方向320在第二方向上移动凹部420远离导引元件410。后面使用图2a-2d和图4a-5将详述这种可以能性。
53.如图3a中所见,导引元件410可以包括滚动元件411,该滚动元件能够被引入到凹部420中。该滚动元件411可以设置在导引元件410的自由端412上。该滚动元件411可以制成辊子。
54.如图2a中所见,锁定系统400可以包括返回装置413,当第一组件210和第二组件220处于闲置位置时,返回装置413倾向于将导引元件410插入到凹部420中。
55.返回装置可以包括支撑弹簧414,以推动导引元件410和凹部420中的一个朝向另一个。例如,支撑弹簧414可以构造成朝向凹部420推动导引元件410。
56.返回装置413可以包括校准螺钉415,该校准螺钉被适配成与支撑弹簧414配合,以修改返回装置413的刚度。通过改变返回装置413的刚度,可以改变锁定系统400的转矩阈值。较高的刚度对应于较高的转矩阈值,并且较低的刚度对应于较低的转矩阈值。
57.通常,在锁定系统400切换至接合构造期间,导引元件410沿着插入方向310被插入到凹部420中。
58.如在图4a-4b中所见,插入方向310可以基本上平行于平移方向320,或者平行于旋转轴线300。因此,使用第一组件210或者第二组件220的重量和/或使用主螺旋桨100的重量和/或其轴的重量(例如,在基本上垂直的旋转轴线300的情况下),可以切换到接合的构造。另外,当旋转轴线300基本上为水平时,例如,该构造允许使用主螺旋桨100上的航空阻力使锁定系统400进入接合构造。
59.可替代地,如在图2a中可见,插入方向310可以基本上垂直于平移方向320,或者垂直于旋转轴线300。该构造可以允许减小主螺旋桨100的轴的长度,和/或最小化锁定系统400在平移方向320上的空间需求。当存在返回装置413时,当第一组件210和第二组件220处于闲置位置时,它可以有利于将导引元件410插入到凹部420中,并且还可以保持接合构造。与平移方向320垂直的插入方向310还可以有利于返回装置413的刚度的校准。
60.还计划在插入方向310平行于平移方向320时使用返回装置413。
61.通常,给定的凹部可以限定至少一个预确定的锁定位置。有利地,在锁定位置中,主螺旋桨100的至少一个桨叶101在飞行阶段的至少一部分期间,相对于飞行器基本上沿着与飞行器周围的空气流动的方向“e”相同的方向延伸,如图1b所见。这被称为“标记”位置。例如,在巡航阶段期间,空气基本上平行于飞行器的纵向轴线围绕飞行器流动。在这种情况下,从主螺旋桨100的轴径向地延伸的桨叶101可以定向成使得其径向延伸部平行于飞行器的纵向轴线800。
62.当主螺旋桨100未被电机200驱动时,标记位置允许减小主螺旋桨100的空气动力学阻力,特别地在主双桨叶或者三桨叶的螺旋桨100的情况下。
63.当主螺旋桨100包括多于三个桨叶时,主螺旋桨100的标记位置为桨叶的定向对风流提供最小阻力的位置。
64.通常,锁定系统400限定了至少一个锁定位置。例如,在图3a中,锁定系统400限定了单个锁定位置,因为它包括与单个导引元件410配合的单个凹部420。在图5中,锁定系统400限定了几个锁定位置,因为它包括几个凹部421、422、423、424。
65.根据一个实施例,当限定多个锁定位置时,每个锁定位置将主螺旋桨100置于使其阻力最小化的位置。例如,主双桨叶的螺旋桨100可以被锁定在对应于主螺旋桨100的标记位置的两个锁定位置中。在主三桨叶的螺旋桨100的情况下,可以设置与主螺旋桨100的标
记位置对应的三个锁定位置。
66.锁定系统400可以包括等于主螺旋桨100的桨叶101、102的数量的凹部421、422的数量,这样的构造可以减少从自由构造切换到接合构造所需的时间。锁定系统400可以包括等于凹部421、422的数量或者主螺旋桨100的桨叶101、102的数量的导引元件410、410
′
的数量。根据一个实施例,锁定系统400包括导引元件410、410
′
的数量小于主螺旋桨100的桨叶101、102的数量和/或小于凹部421、422的数量,如图3b中所见。虽然多个导引元件410、410
′
允许增加锁定系统400的转矩阈值,但小于凹部421、422的数量和/或者主螺旋桨100的桨叶101、102的数量的导引元件410、410
′
的数量允许避免锁定系统400超重和/或者避免限定与飞行器要求相比过大的转矩阈值。此外,或者可替换地,这种构造可以避免使锁定系统400在其接合构造中是超静定的。
67.图2a示出了主螺旋桨100、电机200和锁定系统400。主螺旋桨100和电机200基本上同轴,使得它们共有相同的旋转轴线300。例如,主螺旋桨100的轴固定到电机200的转子。
68.电机200和主螺旋桨100构造成在牵引构造中配合。锁定系统400设置在主螺旋桨100与电机200之间。
69.电机200的第一组件210和第二组件220被表示为处于闲置位置,这允许锁定系统400的导引元件410沿着基本上垂直于旋转轴线300的插入方向310被插入到锁定系统400的凹部420中,并且因此允许锁定系统400切换到其接合构造。通过导引元件410的自由端412和凹部420之间的配合,锁定系统400被保持在接合构造中。当电机200向第一组件210和第二组件220施加大于锁定系统400的转矩阈值的转矩时,可以破坏这种配合。
70.图3a示出了图2a中所示的锁定系统400的截面视图。锁定系统400包括返回装置413,其倾向于将导引元件410的自由端412插入到凹部420中。返回装置413的刚度至少部分地确定锁定系统400的转矩阈值。返回装置413包括支撑弹簧414和校准螺钉415,它们配合以改变返回装置413的刚度。
71.导引元件410包括指状件,该指状件的自由端412被插入到具有凹部420的圆柱部件419中。该圆柱部件419可以附接至电机200的轴和/或者主螺旋桨100的轴。
72.指状件被滑动地安装在返回装置413的外壳中,该外壳用于安装返回装置413、用于引导指状件,并且用于布置支撑弹簧414和校准螺钉415。
73.凹部420被呈现在圆柱部件419的圆周表面上,与导引元件410的自由端412相对。这种布置可以有利于导引元件410沿着插入方向310插入到凹部420中。
74.圆周表面可以包括其中形成凹部420的平坦部分。平坦部分可以允许增加锁定系统400的转矩的阈值,和/或者引起返回装置413的渐进压缩。在精确施加使导引元件410与凹部420分离的附加转矩的情况下(例如,这可以发生在湍流期间),平坦部分允许将导引元件带回凹部420。平坦部分的尺寸可以基于桨叶的数量、和/或凹部420的数量和/或导引元件410、和/或基于锁定系统400的转矩的阈值来确定。
75.根据一个实施例,圆柱部件419可以具有等于或者小于平移冲程的厚度(在沿着平移冲程的方向上测量的)。例如,圆柱部件419的厚度可以略小于平移冲程,以在工作位置期间从导引元件脱离。
76.这种构造允许单个锁定系统400确保电机200和主螺旋桨100在它们在牵引以及推进方面配合时的锁定和解锁,可能地使用单个圆柱部件419。在这种情况下,闲置位置布置
在两个工作位置之间。
77.当圆柱部件包括圆周凸缘418时(以下详细描述),圆柱部件419的厚度不考虑圆周凸缘418的厚度。
78.凹部420可以被制成沟槽。当第一组件210和第二组件220从工作位置切换到闲置位置时,该沟槽允许有利地将导引元件410插入到凹部420中。例如,当指状件穿过沟槽时,压缩返回装置413以将指状件插入到凹部420中所需的力较小。
79.当沟槽具有的深度(从圆柱部件419的圆周表面朝向旋转轴线测量的)等于凹部420的深度时,当指状件穿过沟槽时,可能地,返回装置413不被压缩。在这种情况下,可以说,锁定系统400具有两个插入方向:第一插入方向310与平移方向320垂直(例如,由于返回装置413的定向),并且第二插入方向由沟槽限定。
80.沟槽可以在平移方向310上(或者与其平行)从凹部420延伸,或者可以围绕旋转轴线遵循螺旋路径。其宽度(可以在圆柱部件419的圆周方向上测量)可以是恒定的或者可以根据距凹部420的距离而变化。
81.沟槽可以具有基本上半圆柱形、或者甚至半圆锥形的区段(沿着其从凹部420延伸的方向/路径测量的),其中锥体的基部被定向为远离凹部420,以在切换到闲置位置期间引导凹部420朝向导引元件410。可动部分210的其他形状可以设计成有利于在平移移动期间引入导引元件。
82.如在图2b中可见,锁定系统400被构造成当电机200在第一组件210和第二组件220上施加大于转矩阈值的旋转转矩时,从接合构造切换至自由构造。转矩阈值可以基于主螺旋桨100的桨叶的数量来限定。例如,基本上等于10nm或者更大的阈值可以足以用于具有至少两个桨叶的小型主螺旋桨100,和/或500nm或者更小的阈值可以足以用于主六桨叶或者更少桨叶的螺旋桨100。例如,当主螺旋桨100为三桨叶、四桨叶或者五桨叶的螺旋桨时,阈值可以在10nm和500nm之间,或者在10nm和350nm之间,或者在350nm和500nm之间,桨叶的增加数量对应于更高的阈值。因此,在正常飞行条件下,由主螺旋桨100上的流动施加到锁定系统400的转矩不足以将其解锁,但由电机200施加到锁定系统400的转矩足以将主螺旋桨100解锁。
83.当锁定系统400离开接合构造时,主螺旋桨100由电机200驱动,因此产生推力,该推力倾向于沿着基本上平行于旋转轴线300(因此,基本上垂直于平移方向310)的平移方向320移动凹部420远离导引元件410。推力还倾向于将电机220的第一组件210和第二组件220置于工作位置。当第一组件210和第二组件220处于工作位置时,导引元件410和凹部420彼此脱离,从而防止锁定系统400返回到接合构造。
84.此外,推力用于将锁定系统400保持在自由构造中,因为它将第一组件210和第二组件220保持在工作位置中。
85.当电机200停止驱动主螺旋桨100时,第一组件210和第二组件220可以返回闲置位置。
86.由于主螺旋桨100和电机200在牵引构造中配合,并且由于凹部420固定到主螺旋桨100的轴,因此切换到工作位置引起凹部420沿着平移方向320与电机200分离,导引元件410附接至其外壳。同样地,切换到闲置位置引起凹部420沿着平移方向320接近电机200(因此,接近导引元件410)。
87.如图2a中所见,圆柱部件419可以包括圆周凸缘418。圆周凸缘418可以限定对第一组件210和第二组件220相对于彼此的平移冲程的限制,或者对凹部420和导引元件410相对于彼此的平移冲程的限制。圆周凸缘418可以例如,搁置在导引元件410上,以防止凹部420超过导引元件410的自由端412,例如通过限制凹部420沿着平移方向320接近电机200。根据一个实施例,外壳还允许沿着平移方向320相对于凹部420调整指状件的位置,以在主螺旋桨100与电机200之间的配合改变期间有利于锁定系统400的重新构造。当存在圆周凸缘时,锁定系统400的重新构造可以包括圆柱部件419相对于平移方向320的反转。
88.图2c示出了电机200、主螺旋桨100和锁定系统400,电机的第一组件210和第二组件220被表示为处于闲置位置。主螺旋桨100可以按与图2a中主螺旋桨100连接到电机200的方式相同的方式连接到电机200。电机200和主螺旋桨100被构造成在推进构造中配合。电机200设置在锁定系统400和主螺旋桨100之间。锁定系统400可以与图2a中示出的锁定系统基本上相同。
89.如图2d中所见,当电机200在第一组件210和第二组件220上施加大于转矩阈值的旋转转矩时,锁定系统400离开其接合构造,并且电机200驱动主螺旋桨100。由主螺旋桨100产生的推力倾向于使主螺旋桨100沿着平移方向320更靠近电机200。
90.由于主螺旋桨100和电机200在推进构造中配合,并且由于凹部420固定到主螺旋桨100的轴,切换到工作位置引起凹部420沿着平移方向320与电机200分离,而导引元件410附接至外壳。同样地,切换到闲置位置引起凹部420沿着平移方向320接近电机200。
91.当返回装置413的外壳允许调整指状件沿着平移方向320相对于凹部420的位置时,根据一个实施例,通过改变主螺旋桨100与电机200之间的配合,通过沿着平移方向320反转凹部420和插入元件410的次序,可以重新构造锁定系统400。当存在圆周凸缘时,锁定系统400的重新构造可以包括圆柱部件419相对于平移方向320的反转。
92.图3b示出了用于图3a中所示的锁定系统400的替代部件。它是圆柱部件419的变体,包括几个凹部421、422。凹部421、422呈现在圆柱部件419的圆周表面上。凹部421、422中的至少一个可以形成在圆周表面的平坦部分中,或者,如图3b中所见,每个凹部421、422可以形成在其自身的圆周表面的平坦部分中。
93.图4a示出了电机200、主螺旋桨100和锁定系统400。主螺旋桨100可以按与图2a中主螺旋桨100连接到电机200的方式相同的方式连接到电机200。主螺旋桨100和电机200构造成以牵引构造配合。锁定系统400设置在电机200和主螺旋桨100之间。
94.电机200表示为其第一组件210和第二组件220处于闲置位置,这允许锁定系统400的导引元件410沿着基本上平行于旋转轴线300的插入方向310被插入/装配到锁定系统400的凹部420中,并且,因此允许锁定系统400切换到其接合构造。
95.如图4b中所见,导引元件410包括凸耳,凸耳的自由端412可以被插入具有凹部420的圆柱部件419中。凸耳沿着插入方向310突出。导引元件410可以被制成围绕旋转轴线300设置的环。
96.凹部420呈现在圆柱部件419的轴向表面上,与导引元件410的自由端412相对。这种布置可以有利于沿着插入方向310将导引元件410插入到凹部中。圆柱部件419可以是基本上中空的,例如,它可以制成为围绕主螺旋桨100的轴的环。
97.凹部420被制成槽口,凹部的表面基本上对应于插入元件410的自由端412的表面。
凹部420和导引元件410的这些对应表面可以彼此配合,使得当电机200在第一组件210和第二组件220上施加大于转矩阈值的旋转转矩,以解锁锁定系统400时,这些表面推动凹部420和导引元件410沿着基本上平行于旋转轴线300(并且,因此基本上平行于插入方向310)的平移方向320远离彼此移动。
98.锁定系统400的转矩阈值可以至少部分地由凸耳和槽口的对应表面中的至少一个的几何形状来确定。当锁定系统400离开接合构造时,通过确保第一组件210和第二组件220移动离开闲置位置,可以简化锁定系统400的结构(以及因此飞行器的结构)。
99.例如,转矩阈值可以根据凹部420的深度而变化。例如,相对深的凹部420可以提供比相对浅的凹部420更大的转矩阈值。
100.作为替代或者作为补充,转矩阈值可以根据在主螺旋桨100的旋转方向上凹部420的边缘的刚度而变化。例如,对于相同深度的两个凹部420,在主螺旋桨100的旋转方向上具有相对陡峭边缘的凹部可以赋予比具有相对不太陡峭边缘的凹部更大的转矩阈值。
101.根据一个实施例,在主螺旋桨100的旋转方向上凹部420的边缘可以限定主螺旋桨100的旋转平面中60
°‑
120
°
的内角。
102.根据一个实施例,凹部420的周边可以制成圆形。这种构造允许减少锁定系统400上的磨损。
103.当凹部420的边缘中一个边缘在主螺旋桨100的旋转方向上制成圆形时,角度可以认为是部分地由在其与凹部420周边的连接的水平处边缘的切线所限定。
104.为了减少锁定系统400(或者其凹部420或者其导引元件410)的磨损,导引元件410可以包括在凸耳的自由端412处的滚动元件。在这种情况下,槽口可以具有圆形表面,如以上针对图3a中所示的凹部420所描述的。
105.由于凹部420固定到主螺旋桨100的轴,并且由于导引元件410附接到电机200的外壳上,这种分离还倾向于使电机200的第一组件210和第二组件220沿着平移方向320朝向工作位置彼此平移。
106.当锁定系统400已经离开其接合构造时,电机200可以驱动主螺旋桨100,产生推力。由于主螺旋桨100和电机200在牵引结构中配合,这种推力可以倾向于使凹部420远离导引元件410移动,直到导引元件410和凹部420彼此脱离为止,从而防止锁定系统400返回接合结构。
107.此外,推力用于将锁定系统400保持在自由构造中,因为它将第一组件210和第二组件220保持在工作位置中。当电机200停止驱动主螺旋桨100时,第一组件210和第二组件220可以返回到闲置位置,这允许锁定系统400切换到接合构造。
108.图4c示出了主螺旋桨100、锁定系统400和电机。主螺旋桨100可以按与图2a中主螺旋桨100连接到电机200的方式相同的方式连接到电机200。主螺旋桨100和电机200构造成在推进构造中配合。电机200设置在主螺旋桨100与锁定系统400之间。锁定系统400与图4b中所示的锁定系统400基本上相同。可以看到,图4c中所示的锁定系统400相对于电机200和主螺旋桨100的定向沿着平移方向320相对于图4b中所示的锁定系统400被反转。因此,在图4c中,导引元件410设置在主螺旋桨100与凹部420之间。
109.图5示出了主螺旋桨100、锁定系统400和电机200。主螺旋桨100可以按与图2a中主螺旋桨100连接到电机200的方式相同的方式连接到电机200。主螺旋桨100和电机200构造
成在牵引构造中配合。锁定系统400设置在电机200和主螺旋桨100之间。
110.电机200表示为其第一组件210和其第二组件220处于工作位置中,并且锁定系统400表示为处于其自由构造中。在由电机200驱动其期间,主螺旋桨100产生倾向于将第一组件210和第二组件220保持在工作位置的推力,并且因此也倾向于将锁定系统400保持在自由构造中。
111.锁定系统包括至少两个凹部421、422和两个导引元件410、410
′
。还计划了其他多个凹部421、422和/或导引元件410、410
′
。例如,在图5中,锁定系统包括四个凹部421、422、423、424和两个导引元件410、410
′
。
112.每个导引元件410、410
′
包括相对于旋转轴线300垂直地和/或者径向地支撑的杆。每个凹部421、422形成在导引元件410、410
′
的相对的圆柱部件419的轴向表面上。凹部421、422可以被制成槽口。
113.围绕旋转轴线300设置圆柱部件419。当圆柱部件419固定到电机200的外壳或者飞行器时,其可以具有环的形状,其中可以布置主螺旋桨100的轴或者电机200的转子(或者更具体地,电机200的输出轴)。
114.当锁定系统400切换到其接合构造时,杆被插入/装配到凹部421、422中。为了确保插入和移除(在切换到自由构造期间),杆可以固定到第一组件210(例如,固定到主螺旋桨100的轴),并且圆柱部件419可以固定到第二组件220(例如,固定到电机200的外壳)。
115.当杆固定到轴(例如,主螺旋桨100的轴)时,其直径可以小于轴的直径。例如,杆的直径可以被包括在轴的直径的1/20与1/8之间,这取决于主螺旋桨100的桨叶的数量和形状。当杆从轴径向地延伸时,其可以附接在轴的径向孔中。根据一个实施例,这种孔可以是通孔,以布置两个杆,这两个杆在直径上相对,并且彼此固定。
116.当主螺旋桨100未被电机200驱动时,电机200的第一组件210和第二组件220可以切换到它们的闲置位置。由于主螺旋桨100和电机200以牵引构造配合,这种切换伴随有主螺旋桨100沿着基本上平行于旋转轴线300的平移方向320接近电机200。由于杆固定到主螺旋桨100的轴上,并且圆柱部分419固定到电机200的外壳,因此主螺旋桨100接近电机200还引起杆沿着基本上平行于平移方向320的插入方向310接近凹部421、422。
117.导引元件410,410
′
与凹部421,422的分离可以引起第一组件210和第二组件220朝向工作位置平移,以离开闲置位置。
118.这些杆中的至少一个杆可以在其自由端412处包括圆周表面,该圆周表面对应于与凹部421、422接触的表面。如图4a中所示的锁定系统400所见,当电机200向第一组件210和第二组件220施加大于锁定系统400的转矩阈值的转矩时,这些表面之间的配合可以使导引元件410、410
′
沿着平移方向320移动远离凹部421、422。锁定系统400的转矩阈值可以至少部分地由杆和槽口的对应表面的几何形状来确定(例如,根据与之前所描述的刚度和/或者深度有关的相同现象)。
119.为了限制对锁定系统的杆和/或槽口的磨损,每个杆可以包括滚动元件。凹部421、422的对应表面中的每个可以具有如以上针对图3a中所示的凹部420所描述的圆形表面。
120.主螺旋桨100包括两个桨叶101、102,并且锁定系统400包括两个凹部421、422,以确保两个锁定位置。当主螺旋桨100包括两个以上桨叶时,提供其他数量的锁定位置。还提供了其他数量的桨叶101,102,以及可以等于或者不等于桨叶101、102的数量的其他数量的
凹部421、422或者导引元件410、410
′
。例如,当主螺旋桨100包括四个桨叶101、102、103、104时,锁定系统400可以包括图5中所示的两个导引元件410、410
′
和四个凹部421、422、423和424。
121.具有几个导引元件410、410
′
的锁定系统400可以比具有单个导引元件410的锁定系统400具有更高的转矩阈值。
122.如图4b和4c中可见,图5中所示的锁定系统400可以相对于平移方向320被重新定向,以适合于主螺旋桨100与电机200之间的推进构造。
123.根据一个实施例,根据本公开的飞行器可以被构造成在飞行期间锁定和/或者解锁主螺旋桨100,飞行包括第一飞行阶段和第二飞行阶段,在第一飞行阶段中围绕飞行器的空气流动基本上平行于主螺旋桨的旋转轴线,在第二飞行阶段中围绕飞行器的空气流动基本上垂直于主螺旋桨100的旋转轴线300。例如,它可以被构造成横向地巡航,并且垂直地起飞和/或着陆。
124.根据一个实施例,飞行器可以执行飞行机动,其包括其中主螺旋桨100的推力减小,直到第一组件210和第二组件220切换到闲置位置的步骤。例如,可以在停止由电机200驱动主螺旋桨100时,实现锁定系统400切换到接合构造。
125.这个步骤可以允许锁定系统400从自由构造切换至接合构造。作为替代方案或者补充方案,飞行机动可以包括其中通过将大于锁定系统400的转矩阈值的电机转矩施加到电机200的第一组件210和第二组件220而释放主螺旋桨100的旋转的步骤。这个步骤可以允许锁定系统400从接合构造切换到自由构造。
126.例如,飞行器可以执行这种机动,作为主螺旋桨100的旋转轴线相对于飞行器的机身的重新定向的一部分。在这种情况下,主螺旋桨100的锁定还允许避免由于主螺旋桨100在其重新定向期间围绕其旋转轴的旋转而导致的陀螺效应。
127.主螺旋桨100的锁定可以用于许多情况。例如,当停止在飞行阶段(如上所述)的情况下所实现的电机驱动时,和/或者在电机200故障期间。
128.与通过电机转矩的锁定或者通过电磁体的锁定和选择性释放相比,不用发动机,选择性地锁定或者释放主螺旋桨100的能力允许避免操作安全问题,此外,允许降低飞行器的能量消耗。
129.通常,如果主螺旋桨100与电机200的分离具有使凹部420移动远离导引元件410的效果,那么锁定系统400可以被视为能够与在牵引构造中配合的电机200和主螺旋桨100一起使用。同样地,如果主螺旋桨100接近电机200具有使凹部420移动远离导引元件410的效果,那么锁定系统400可以被视为能够与在推进构造中配合的电机200和主螺旋桨100一起使用。
130.为了制造锁定系统400,锁定系统能够与牵引构造一起使用,能够与推进构造一起使用(或者反之亦然),而不改变其相对于电机和相对于螺旋桨的相对定位,锁定系统400的定向可以在平移方向320上被反转,并且凹部420和插入元件的位置反转,这样使得工作位置变成闲置位置。
131.如图4b-4c以及图2b和2d中所见,这可以通过反转锁定系统400的定向以及锁定系统400和电机200相对于主螺旋桨100的位置来实现。这种技术允许保持凹部420和导引元件410附接到第一组件210和第二组件220的方式。
132.另外,如图4b和5中所见,通过反转锁定系统400的定向以及导引元件410和凹部420与第一组件210和第二组件220的附接,可以获得相同的效果。这种技术允许保持锁定系统400和电机200相对于主螺旋桨100的位置。
133.为了将这种技术应用于图5中所示的锁定系统400,可能有必要反转圆柱部件419的定向,以保持导引元件410(无论是一个或者几个杆的形式,还是一个或者几个凸耳的形式)到槽口421、422、423、424的可进入性。
134.为了将这种技术应用于图4a-4b中所示的锁定系统400(或者图4c中所示的锁定系统),也可能有必要反转导引元件410的定向,以保持凸耳进入槽口420的能力。
135.为了将这种技术应用于图2a-2b中所示的锁定系统400(或者图2c-2d中所示的锁定系统),可能有必要反转圆柱部件419的定向,以保持导引元件410从工作位置到沟槽(如果存在)的可进入性,和/或者防止圆周凸缘418(如果存在)阻止从工作位置到闲置位置的切换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1