一种用于有大气层和固体表面的地外天体探测的穿透器
1.本发明涉及类地行星探测领域,具体为一种类地行星深度探测穿透器。
背景技术:
2.近年来,随着深空探测技术的高速发展,人类在对月球、火星等近地主要天体开展多种手段探测的基础上,将探测目标扩展到了一些更深远的天体,以进一步了解宇宙中各类天体的结构特征和空间环境。开展涵盖木星、天王星、海卫一等冰巨星系统内星体的研究,是探索暗物质、地外海洋、地外氮元素的重要目标,是研究太阳系起源和生命演化的重要载体。
3.目前,着陆器探测是国内外广泛采用的天体探测手段,但很难甚至无法对天体星表以下较深处的物质进行获取和分析,而且实现星表稳定着陆的难度高、成本大,在自主导航、着陆缓冲、星表热控、能源保障等技术领域都存在较多的不确定因素,极大影响了相关任务的成功率。
4.高速撞击穿透探测作为一种新型的天体探测手段越来越多地引起国内外关注。其基本原理是采用环绕器在绕飞阶段的适当时机点上以适当的姿态分离释放其携带的撞击穿透器,对目标天体表面进行高速撞击以便将仪器嵌入到星表较深处。
5.当前,国内外对星表高速撞击穿透探测器的研究在目标天体环绕和降落等领域取得了一定成果,但缺乏对穿透器撞击后生存问题的深入研究,具体针对木卫三、海卫一这种有大气层的目标星体的进入阶段特殊性的研究就更加鲜见报道了。而且常规侵彻器在进入阶段通过反推火箭实现能量管理,但是大气环境的反推降能实现复杂,侵彻器面向大气环境的热防护及减速方案有待研究。
技术实现要素:
6.本发明的目的在于解决上述背景技术中的问题,提出一种类地行星深度探测穿透器,该穿透器可实现进入飞行段的姿态控制,使穿透器速度和高度稳步下降;进入抛罩窗口后,实现防护罩平稳分离,给穿透器创造良好的下降与侵彻初始条件;穿透器内核组件为多层缓冲吸能结构,保证侵彻过程中内核组件承受的过载不超过某个限制。
7.本发明是这样实现的:一种用于有大气层和固体表面的地外天体探测的穿透器,其特征在于,所述的穿透器包括防护罩,以及防护罩内部设置的穿透器内核、防护罩连接分离机构和穿透器质心调整机构。
8.所述的穿透器内核包括实现地面侵彻的穿透结构和防止科学载荷冲击过载的缓冲吸能结构;所述防护罩包括能够耐受气动加热的上下壳体和实现姿态调整的前后气动舵面;所述的防护罩连接分离机构由电机驱动齿轮旋转,齿轮上的锁紧杆在主动锁件上的滑轨中滑动,从而实现机构的连接和分离;所述质心调整机构由八根滚珠丝杠电动伸缩杆组成,通过各个杆的不同伸缩组合来实现对穿透器内核的位置调整,从而实现穿透器整体的
质心变换,为穿透器创造良好的侵彻初始条件。所述质心调整机构中的滚珠丝杠电动伸缩杆由电机驱动螺杆旋转,滑动活塞中的传动螺母在螺杆上传动滑行,所述的滑动活塞带动滑杆在杆套中滑行实现电动杆的伸缩运动。
9.所述的穿透器内核包括冲击头和缓冲吸能结构;所述的缓冲吸能结构包括蜂窝结构件和拉杆减震结构;所述的拉杆减震结构后端连接与穿透器后盖,所述的穿透器后盖再与穿透器内核外壳连接,所述的蜂窝结构件外径与穿透器内核外壳井状筒形结构内壁直径。
10.所述缓冲吸能结构包括蜂窝结构件和拉杆减震结构,两者共同保证侵彻过程中内部科学载荷承受的过载不超过某个限制。所述穿透结构为钛合金内核外壳,所述钛合金内核外壳头部以外为井状筒形结构。
11.所述的拉杆减震结构包括科学载荷,上端盖,下端盖,缓冲拉杆,导杆;所述的科学载荷和下端盖为一体成型结构,通过四根缓冲拉杆的拉伸塑性形变,实现缓冲拉杆沿四根不锈钢导杆的相对于上端盖的轴向运动。
12.进一步,所述的拉杆减震结构的上端盖与穿透器后盖通过螺栓固定连接,所述的穿透器后盖与穿透器内核外壳筒形结构部分为内外螺纹配合连接;所述的拉杆减震结构的下端盖的下端面紧压蜂窝结构件,所述的下端盖外壁镶嵌一圈带状固体自润滑材料,所述的带状固体自润滑材料与所述穿透器内核外壳井状筒形结构内壁之间采用二硫化钼固体润滑剂来润滑;所述的上端盖与导杆间设有铜导杆套;所述的科学载荷的外壳采用带桁条加强筋的钛合金壳体结构。穿透结构为钛合金内核外壳,所述钛合金内核外壳头部以外为井状筒形结构。
13.进一步,所述的防护罩包括上壳体、减速腹面、前气动舵面和后气动舵面;所述的减速腹面位于上壳体尾部,所述的上壳体截面为半圆形,所述的减速腹面截面采用椭圆形;所述的气动舵面为前后两对,分别为前气动舵面和后气动舵面,其前后气动舵面的末端分别与上壳体头部和尾部相连,通过所述的一维气动舵面的偏转方式组合,实现防护罩俯仰、滚转和偏航的三维姿态调整。防护罩耐受气动加热,可以有效保护内部穿透器。防护罩可以为穿透器提供下降轨迹机动,实现穿透器姿态控制,给穿透器创造良好的下降与侵彻初始条件。
14.进一步,所述的防护罩连接分离机构包括主动锁件、法兰盘、齿轮盘、卡簧、锁紧杆和保护罩;所述的主动锁件表面四周设有四个立柱;且所述的主动锁件中心设有凸台;所述的凸台上有一对滑轨;所述的齿轮盘通过卡簧与法兰盘连接;所述的锁紧杆卡接到主动锁件中心凸台的滑轨中,且锁紧杆能够在所述滑轨中滑动,所述的锁紧杆在所述滑轨中滑动实现分离机构的解锁分离。
15.进一步,所述的法兰盘与防护罩上的上壳体固定连接,所述的立柱与上壳体凹槽相适应;所述的凸台深入上壳体内部。
16.进一步,所述的穿透器质心调整机构包括滚珠丝杠电动伸缩杆,所述的滚珠丝杠电动伸缩杆包括电机固定件,电机,前端盖,传动螺母,滑动活塞,螺杆,后端盖,滑杆,杆套,活动盖板,记忆合金拔销器。记忆合金拔销器实现所述穿透器内核与所述防护罩的分离。所述的滚珠丝杠电动伸缩杆由电机驱动螺杆旋转,所述的螺杆两端分别设置第一轴承、第二轴承;所述的滑动活塞与传动螺母固定连接,所述的滑动活塞中的传动螺母在螺杆上传动
滑行,所述的滑动活塞带动滑杆在杆套中滑行实现滚珠丝杠电动伸缩杆的伸缩运动。
17.与现有技术相比,本发明的有益效果如下:1.本发明提供的类地行星深度探测穿透器,结构简单,易控制,下落中下降速度、舵面角度组件、防护罩姿态、腹部气动阻力等因素的耦合,实现穿透器下降轨迹机动;2.下落中防护罩产生气动阻力,耐受气动加热,从而有效保护内部穿透器;3.采用四个连接分离机构对称分布作为分离动力源,分离过程中冲击小,分离同步性好,分离速度快,分离可靠性高;4.防护罩连接分离机构,结构简单,体积小巧,紧凑,应用在防护罩上,与防护罩为一体结构,设计合理,实用性强;5.质心调整机构由八根滚珠丝杠电动伸缩杆组成,通过各个杆的不同伸缩组合来实现对穿透器内核的位置调整,从而实现穿透器整体的质心变换,为穿透器创造更好的侵彻初始条件;6.穿透器内核机构包括实现地面侵彻的穿透结构和防止核心组件冲击过载的缓冲吸能结构,有效保证侵彻过程中内核组件承受的过载不超过某个限制。
附图说明
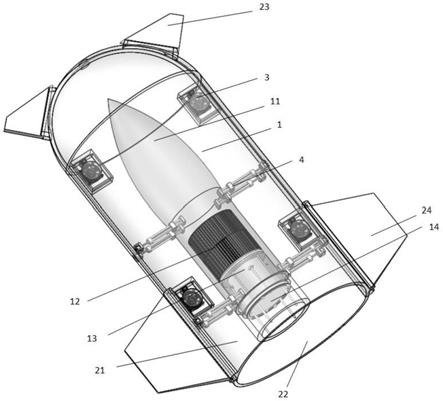
18.图1为本发明一种用于有大气层和固体表面的地外天体探测的穿透器的整体结构示意图;图2为一种用于有大气层和固体表面的地外天体探测的穿透器的防护罩分离运动示意图;图3为一种用于有大气层和固体表面的地外天体探测的穿透器的防护罩连接分离机构示意图;图4为一种用于有大气层和固体表面的地外天体探测的穿透器的防护罩连接分离机构剖视图;图5为一种用于有大气层和固体表面的地外天体探测的穿透器的滚珠丝杠电动伸缩杆收缩示意图;图6为一种用于有大气层和固体表面的地外天体探测的穿透器的滚珠丝杠电动伸缩杆伸展示意图;图7为一种用于有大气层和固体表面的地外天体探测的穿透器的滚珠丝杠电动伸缩杆收缩剖视图;图8为一种用于有大气层和固体表面的地外天体探测的穿透器的拉杆减震结构示意图;图9为一种用于有大气层和固体表面的地外天体探测的穿透器的内核缓冲吸能结构剖视图;图中:1
‑
穿透器内核,11
‑
冲击头,12
‑
蜂窝结构件,13
‑
拉杆减震结构,131
‑
科学载荷,132
‑
上端盖,133
‑
下端盖,134
‑
缓冲拉杆,135
‑
导杆,136
‑
带状固体自润滑材料,137
‑
导杆套,14
‑
穿透器后盖,15
‑
穿透器内核外壳,2
‑
防护罩,21
‑
上壳体,22
‑
减速腹面,23
‑
前气动舵面,24
‑
后气动舵面,3
‑
防护罩连接分离机构,31
‑
主动锁件,311
‑
立柱,312
‑
凸台,313
‑
滑轨,32
‑
法兰盘,33
‑
齿轮盘,34
‑
卡簧,35
‑
锁紧杆,36
‑
支座,37
‑
配套小齿轮,38
‑
电机,39
‑
保
护罩,4
‑
滚珠丝杠电动伸缩杆,41
‑
电机固定件,411
‑
电机,42
‑
前端盖,43
‑
传动螺母,44
‑
滑动活塞,45
‑
螺杆,451
‑
第一轴承,452
‑
第二轴承,46
‑
后端盖,461
‑
滑杆,462
‑
杆套,47
‑
活动盖板,471
‑
记忆合金拔销器。
具体实施方式
19.为使本发明的目的、技术方案及效果更加清楚,明确,以下列举实例对本发明进一步详细说明。应当指出此处所描述的具体实施仅用以解释本发明,并不用于限定本发明。
20.如图1所示,本发明一种用于有大气层和固体表面的地外天体探测的穿透器由穿透器内核机构、防护罩、防护罩连接分离机构和质心调整机构四部分组成。
21.所述防护罩包括上壳体21、减速腹面22、前气动舵面23和后气动舵面24,如图1所示,所述上壳体21截面为半圆形,所述减速腹面22截面采用椭圆形,所述气动舵面为前后两对,其末端分别与所述上壳体21头部和尾部相连,通过所述一维气动舵面的偏转方式组合,实现防护罩俯仰、滚转和偏航的三维姿态调整。防护罩分离运动过程如图2所示,其中x,y为坐标轴的方向,防护罩分离沿y轴方向。
22.如图3所示,所述防护罩连接分离机构3包括主动锁件31、法兰盘32、齿轮盘33、卡簧34、锁紧杆35和保护罩39,所述主动锁件31表面四周设有四个与所述上壳体凹槽相适应的立柱311,且所述主动锁件31中心设有一深入所述上壳体21内部的凸台312,所述凸台312上有一对滑轨313。
23.如图3~4所示,所述法兰盘32与所述上壳体21固定连接,所述齿轮盘33通过所述卡簧34与所述法兰盘32连接,所述锁紧杆35卡接到所述主动锁件31中心凸台312的滑轨313中且所述锁紧杆35可以在所述滑轨313中滑动,所述锁紧杆35在所述滑轨313中滑动实现分离机构的解锁分离,如图4所示细箭头方向为上壳体21相对运动方向,粗箭头方向为主动锁件31及减速腹面22相对运动方向;防护罩分离运动过程如图2所示,其中x,y为图2中坐标轴的方向。
24.如图5~7所示,穿透器质心调整机构的滚珠丝杠电动伸缩杆4包括电机固定件41,电机411, 前端盖42, 传动螺母43, 滑动活塞44, 螺杆45, 后端盖46,滑杆461,杆套462, 活动盖板47,记忆合金拔销器471。具体的,所述滚珠丝杠电动伸缩杆4由电机411驱动螺杆45旋转,所述滑动活塞44中的传动螺母43在螺杆45上传动滑行,所述滑动活塞44与所述传动螺母43固定连接,所述滑动活塞44带动三根滑杆461在杆套462中滑行实现所述电动杆4的伸缩运动,图5~6分别为所述电动杆4的收缩和伸展示意图,图5中箭头方向为所述活动盖板47运动伸展方向。
25.如图1所示,穿透器内核机构由实现地面侵彻的冲击头11和防止科学载荷131冲击过载的缓冲吸能结构所组成。所述缓冲吸能结构包括蜂窝结构件12和拉杆减震结构13,两者共同保证侵彻过程中内部科学载荷131承受的过载不超过某个限制。所述穿透结构为钛合金内核外壳,所述钛合金内核外壳头部以外为井状筒形结构。
26.如图8~9所示,所述拉杆减震结构13包括科学载荷131,上端盖132,下端盖133,缓冲拉杆134,导杆135。所述科学载荷131和下端盖133为一体成型结构,可通过四根铜缓冲拉杆134的拉伸塑性形变实现沿四根不锈钢导杆135的相对于上端盖132的轴向运动。所述上端盖132与所述导杆135间设有铜导杆套137。所述科学载荷131的外壳采用带桁条加强筋的
钛合金壳体结构,保证在大过载冲击中,该壳体保持形状完整,且没有裂痕。
27.如图9所示,所述拉杆减震结构13的上端盖132与穿透器后盖14通过螺栓固定连接,所述穿透器后盖14与所述穿透器内核外壳15筒形结构部分为内外螺纹配合连接。所述拉杆减震结构13下端盖133的下端面紧压所述蜂窝结构件12,所述下端盖133外壁镶嵌一圈带状固体自润滑材料136,所述带状固体自润滑材料136与所述穿透器内核外壳15井状筒形结构内壁之间采用二硫化钼固体润滑剂来润滑。所述蜂窝结构件12外径和所述穿透器内核外壳15井状筒形结构内壁直径一致。
28.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1