瓢虫鞘翅耦合机制仿生减震装置、无人机起落架及无人机
1.本发明涉及减震缓冲技术领域,具体涉及仿生学在减震缓冲设备上的应用,更具体的,涉及一种瓢虫鞘翅耦合机制仿生减震装置、无人机起落架及无人机。
背景技术:
2.如公告日为2018.08.14,公开号为cn207728801u的中国实用新型专利:无人飞行控制器减震装置公开了一种二级减震方案,包括:减震主体、减震桥和副减震装置,减震主体上方设置有副减震装置,减震主体包括:多孔底座、限位底座、减震单元、连接柱、限位顶盖和顶盖本体,多孔底座上设置有连接柱,多孔底座四角处设置有限位底座,限位底座上设置有减震单元,减震单元中心位置设置有减震限位孔。本实用新型减震单元采用橡胶层,内注有阻尼脂层减震效果极佳,飞控上板自带限位柱,底板与四个减震单元组合完成后将飞控的四个减震限位柱插入底板四端减震单元的减震限位孔,之后安装减震桥,形成一个底部四个减震单元,顶部一个减震单元的减震装置。
3.上述现有技术主要利用了橡胶的弹性作用来吸收能量,但整个装置组成元件过于复杂。因此,现有技术仍具有一定的局限性。
技术实现要素:
4.针对现有技术的局限,本发明提出一种瓢虫鞘翅耦合机制仿生减震装置、无人机起落架及无人机,本发明采用的技术方案是:
5.一种瓢虫鞘翅耦合机制仿生减震装置,包括减震机构以及连接机构,其中:
6.所述减震机构包括底板;所述底板下设有若干瓢虫鞘翅状的缓冲部件,所述缓冲部件包括分别连接所述底板的仿鞘翅榫部件以及仿鞘翅卯部件;所述仿鞘翅榫部件与仿鞘翅卯部件之间采用卯榫连接方式连接;
7.所述连接机构设于所述底板上,用于连接保护目标。
8.相较于现有技术,本发明提供的瓢虫鞘翅耦合机制仿生减震装置利用由仿鞘翅榫部件以及仿鞘翅卯部件组成的瓢虫鞘翅状缓冲部件来吸收冲击能量;在受到冲击载荷时,瓢虫鞘翅状缓冲部件会在冲击力的作用下发生变形;在冲击后期,瓢虫鞘翅状缓冲部件会进行回弹卸载冲击力;该减震装置根据瓢虫鞘翅的微观几何结构以及连接机理设计而成,利用了仿生学中的瓢虫鞘翅耦合机制,结构精巧,具有较好的减震缓冲效果。
9.进一步的,所述仿鞘翅榫部件与仿鞘翅卯部件相互对称,分别构成半边瓢虫鞘翅状。
10.进一步的,所述仿鞘翅榫部件以及仿鞘翅卯部件内部分别为分布有若干孔洞的层状结构。
11.进一步的,所述仿鞘翅榫部件以及仿鞘翅卯部件通过插销以及设于所述底板的插销槽连接所述底板。
12.更进一步的,所述底板还设有用于限制所述仿鞘翅榫部件以及仿鞘翅卯部件变形
幅度以及转动角度的限位卡扣。
13.进一步的,所述连接机构与所述底板之间设有低刚度弹簧,所述低刚度弹簧的上端连接所述连接机构的上端,所述低刚度弹簧的下端通过旋转铰链连接所述底板。
14.进一步的,所述连接机构与所述底板之间设有杆件,所述杆件的上端通过球头关节轴承连接所述连接机构的下端,所述杆件的下端通过万向铰链连接所述底板。
15.进一步的,所述连接机构与所述底板之间设有低刚度弹簧以及杆件;
16.所述连接机构包括相互正交设置的第一尺寸可调固定环以及第二尺寸可调固定环;作为所述连接机构的上端,所述第一尺寸可调固定环相对于所述底板横置;作为所述连接机构的下端,所述第二尺寸可调固定环相对于所述底板竖置;
17.所述低刚度弹簧的上端连接所述第一尺寸可调固定环,所述低刚度弹簧的下端通过旋转铰链连接所述底板;
18.所述杆件的上端通过球头关节轴承连接所述第二尺寸可调固定环,所述杆件的下端通过万向铰链连接所述底板。
19.本发明还包括以下内容:
20.一种无人机起落架,其设有前述的瓢虫鞘翅耦合机制仿生减震装置。
21.一种无人机,包括无人机机体以及设于所述无人机机体底部的起落架,所述起落架为前述的无人机起落架。
附图说明
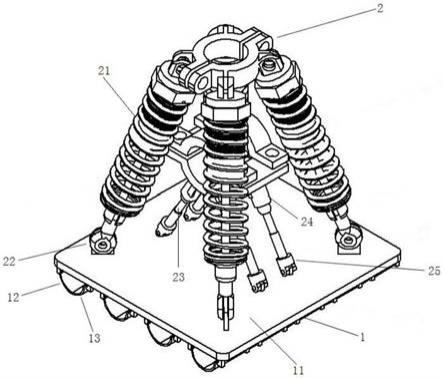
22.图1为本发明实施例1提供的瓢虫鞘翅耦合机制仿生减震装置示意图;
23.图2为本发明实施例1提供的缓冲部件的层状结构示意图;
24.图3为本发明实施例1提供的底板示意图;
25.图4为在受到冲击前本发明实施例1提供的仿鞘翅榫部件与仿鞘翅卯部件的状态示意图;
26.图5为在受到冲击时本发明实施例1提供的仿鞘翅榫部件与仿鞘翅卯部件的状态示意图;
27.图6为在冲击后期本发明实施例1提供的仿鞘翅榫部件与仿鞘翅卯部件的状态示意图;
28.图7为本发明实施例2提供的瓢虫鞘翅耦合机制仿生减震装置示意图;
29.图8为本发明实施例4提供的无人机示意图;
30.附图标记说明:
31.1、减震机构;11、底板;111、插销;112、插销槽;12、仿鞘翅榫部件;13、仿鞘翅卯部件;2、连接机构;21、低刚度弹簧;22、旋转铰链;23、杆件;24、球头关节轴承;25、万向铰链;26、第一尺寸可调固定环;27、第二尺寸可调固定环;100、无人机机体;200、起落架。
具体实施方式
32.附图仅用于示例性说明,不能理解为对本专利的限制;
33.应当明确,所描述的实施例仅仅是本技术实施例一部分实施例,而不是全部的实施例。基于本技术实施例中的实施例,本领域普通技术人员在没有作出创造性劳动前提下
所获得的所有其它实施例,都属于本技术实施例保护的范围。
34.在本技术实施例使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术实施例。在本技术实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
35.下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。在本技术的描述中,需要理解的是,术语“第一”、“第二”、“第三”等仅用于区别类似的对象,而不必用于描述特定的顺序或先后次序,也不能理解为指示或暗示相对重要性。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
36.此外,在本技术的描述中,除非另有说明,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。以下结合附图和实施例对本发明做进一步的阐述。
37.为了解决现有技术的局限性,本实施例提供了一种技术方案,下面结合附图和实施例对本发明的技术方案做进一步的说明。
38.实施例1
39.一种瓢虫鞘翅耦合机制仿生减震装置,请参阅图1,包括减震机构1以及连接机构2,其中:
40.所述减震机构1包括底板11;所述底板11下设有若干瓢虫鞘翅状的缓冲部件,所述缓冲部件包括分别连接所述底板11的仿鞘翅榫部件12以及仿鞘翅卯部件13;所述仿鞘翅榫部件12与仿鞘翅卯部件13之间采用卯榫连接方式连接;
41.所述连接机构2设于所述底板11上,用于连接保护目标。
42.相较于现有技术,本发明提供的瓢虫鞘翅耦合机制仿生减震装置利用由仿鞘翅榫部件以及仿鞘翅卯部件组成的瓢虫鞘翅状缓冲部件来吸收冲击能量;在受到冲击载荷时,瓢虫鞘翅状缓冲部件会在冲击力的作用下发生变形;在冲击后期,瓢虫鞘翅状缓冲部件会进行回弹卸载冲击力;该减震装置根据瓢虫鞘翅的微观几何结构以及连接机理设计而成,利用了仿生学中的瓢虫鞘翅耦合机制,结构精巧,具有较好的减震缓冲效果。
43.具体的,所述仿鞘翅榫部件12与仿鞘翅卯部件13选用具备形变能力的弹性材料,可以在冲击消失时自动恢复原状。
44.在一种可选实施例中,所述底板11为正方形。
45.进一步的,所述仿鞘翅榫部件12与仿鞘翅卯部件13相互对称,分别构成半边瓢虫鞘翅状。
46.进一步的,请参阅图2,所述仿鞘翅榫部件12以及仿鞘翅卯部件13内部分别为分布有若干孔洞的层状结构。
47.具体的,所述仿鞘翅榫部件12以及仿鞘翅卯部件13内部的层状结构与包装纸板类似,以多层复合材料相互平行方式的铺设;通过这种设置,能调高所述仿鞘翅榫部件12以及仿鞘翅卯部件13对冲击能量的吸收效果,以进一步降低冲击载荷对保护目标可能造成的损
伤。
48.进一步的,请参阅图2以及图3,所述仿鞘翅榫部件12以及仿鞘翅卯部件13通过插销111以及设于所述底板11的插销槽112连接所述底板11。
49.更进一步的,所述底板11还设有用于限制所述仿鞘翅榫部件12以及仿鞘翅卯部件13变形幅度以及转动角度的限位卡扣113。
50.具体的,请参阅图4至6,分别为所述仿鞘翅榫部件12以及仿鞘翅卯部件13在受到冲击前、受到冲击时以及在冲击后期的状态:
51.在受到冲击前,所述仿鞘翅榫部件12与仿鞘翅卯部件13处于接合状态,如图4所示。
52.在受到冲击时,所述仿鞘翅榫部件12与仿鞘翅卯部件13在冲击的作用下挤压变形,如图5所示;而由于所述限位卡扣113的限位作用,在这个过程中,所述限位卡扣113限制了挤压变形过大,同时限制了所述仿鞘翅榫部件12与仿鞘翅卯部件13向内侧旋转的角度,避免两者在吸收冲击力时被迫张开。
53.在冲击后期,缓冲部件进行回弹,卸载冲击力,所述仿鞘翅榫部件12与仿鞘翅卯部件13可能会在回弹过程中张开,如图6所示;同样由于所述限位卡扣113的存在,两者的张开角度会在可控范围内,使得冲击结束后所述仿鞘翅榫部件12与仿鞘翅卯部件13能够迅速恢复如图4所示的原状。
54.进一步的,所述连接机构2与所述底板11之间设有低刚度弹簧21,所述低刚度弹簧21的上端连接所述连接机构2的上端,所述低刚度弹簧21的下端通过旋转铰链22连接所述底板11。
55.进一步的,所述连接机构2与所述底板11之间设有杆件23,所述杆件23的上端通过球头关节轴承24连接所述连接机构2的下端,所述杆件23的下端通过万向铰链25连接所述底板11。
56.减震装置在面对复杂的接触面,如果不能及时有效地改变接触角度,可能会降低减震效果;而通过上述设置,所述连接机构2将具备在方向上的自适应性,在应对不同角度的冲击时,由于低刚度弹簧等部件的牵拉调节作用,能让减震装置随冲击力方向的动态调整,使得减震装置与冲击面最大程度地接触,进一步提高减震装置对冲击能量的吸收效果。同时,低刚度弹簧等部件还能在冲击结束后辅助所述仿鞘翅榫部件12与仿鞘翅卯部件13恢复原状,以便再次利用。
57.在一种优选实施例中,各底板11分别设有四个低刚度弹簧21,所述低刚度弹簧21的下端分别连接所述底板11的角落。
58.在一种优选实施例中,各底板11分别设有四个杆件23,所述杆件23的下端连接所述底板11的中间区域;所述杆件23成对设置,每对杆件23对称设置。
59.实施例2
60.本实施例可以视为实施例1基础上得到的一种改进或延伸实施例,具体的,请参阅图7,一种瓢虫鞘翅耦合机制仿生减震装置,包括减震机构1以及连接机构2,其中:
61.所述减震机构1包括底板11;所述底板11下设有若干瓢虫鞘翅状的缓冲部件,所述缓冲部件包括分别连接所述底板11的仿鞘翅榫部件12以及仿鞘翅卯部件13;所述仿鞘翅榫部件12与仿鞘翅卯部件13之间采用卯榫连接方式连接;
62.所述连接机构2设于所述底板11上,用于连接保护目标;
63.所述连接机构2与所述底板11之间设有低刚度弹簧21以及杆件23;
64.所述连接机构2包括相互正交设置的第一尺寸可调固定环26以及第二尺寸可调固定环27;作为所述连接机构2的上端,所述第一尺寸可调固定环26相对于所述底板11横置;作为所述连接机构2的下端,所述第二尺寸可调固定环27相对于所述底板11竖置;
65.所述低刚度弹簧21的上端连接所述第一尺寸可调固定环26,所述低刚度弹簧21的下端通过旋转铰链22连接所述底板11;
66.所述杆件23的上端通过球头关节轴承24连接所述第二尺寸可调固定环27,所述杆件23的下端通过万向铰链25连接所述底板11。
67.具体的,在一种可选的实施例中,所述第一尺寸可调固定环26以及第二尺寸可调固定环27分别由两个对称的半环组成,所述半环之间通过螺栓固定;可以根据保护目标的连接部位尺寸大小调节螺栓的锁紧位置。通过上述设置,使得所述连接机构2具备一定的尺寸适应性。
68.实施例3
69.一种无人机起落架,其设有如实施例1或2所述的瓢虫鞘翅耦合机制仿生减震装置。
70.实施例4
71.一种无人机,请参阅图8,包括无人机机体100以及设于所述无人机机体100底部的起落架200,其特征在于,所述起落架200为如实施例3所述的无人机起落架。
72.显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1