一种农业植保无人机的制作方法
1.本发明涉及无人机技术领域,尤其涉及一种农业植保无人机。
背景技术:
2.农业植保无人机,是用于农林植物保护作业的无人驾驶飞机,该型无人飞机由飞行平台(固定翼、直升机、多轴飞行器)、导航飞控、喷洒机构三部分组成,通过地面遥控或导航飞控,来实现喷药等作业。
3.中国专利申请号为2017112302010的文件公开了一种喷洒精准且飞行平稳的智能型农业植保无人机,包括主体、农药箱、水管、喷头、两个支脚和四个飞行机构,所述农药箱固定在主体的上方,所述喷头设置在主体的下方,所述农药箱通过水管与喷头连通,所述水管内设有阀门,两个支脚分别设置在主体的下方的两侧,四个飞行机构周向均匀分布在主体的外周,所述主体的下方设有调节机构,所述调节机构与喷头传动连接;所述调节机构包括第一电机、调节杆、延伸机构和平衡机构,所述第一电机固定在主体的下方,所述第一电机与调节杆传动连接,所述延伸机构设置在调节杆的一侧,所述平衡机构设置在调节杆的另一侧;所述延伸机构包括驱动组件、固定块、移动块、伸缩架、铰接块和两个第一连杆,所述固定块固定在调节杆上,所述驱动组件与移动块传动连接,所述伸缩架的一端的两侧分别与固定块和移动块铰接,所述伸缩架的另一端的两侧分别通过两个第一连杆与铰接块铰接,所述喷头与铰接块固定连接;所述平衡机构包括平衡杆、滑环和两个平衡组件,所述平衡组件设置在平衡杆与调节杆之间,所述滑环套设在平衡杆上,两个平衡组件中,其中一个平衡组件与平衡杆连接,另一个平衡组件与滑环连接;所述平衡组件包括连接块、伸缩单元和两个平衡单元,两个平衡单元分别设置在伸缩单元的两侧,所述平衡单元包括第二连杆和第三连杆,所述第二连杆的一端与调节杆铰接,所述第二连杆的另一端通过第三连杆与连接块铰接,两个平衡单元中的第二连杆相互铰接,两个平衡单元中的第三连杆相互铰接,两个平衡组件的连接块中,其中一个连接块与平衡杆固定连接,另一个连接块与滑环固定连接。
4.上述已公开文件提供的无人机能提高无人机在飞行喷洒过程中的稳定性;但是上述已公开文件存在以下不足:
5.上述专利中提出的无人机在对农作物进行喷药杀虫时,只能从农作物的上方进行喷洒,喷洒至农作物上的药液等在农作物叶片上滴落,以对农作物枝干上藏有的害虫进行灭杀;但是,当农作物生长茂盛时,喷洒在农作物叶片上的药液很少的一部分下滴,另外当天气晴朗时,农作物叶片上的药液会快速蒸发,大大降低对农作物杀虫的效果。
技术实现要素:
6.本发明目的是针对背景技术中存在的问题,提出一种能从侧方对农作物进行喷药以提高对农作物喷药杀虫效果的农业植保无人机。
7.本发明的技术方案:一种农业植保无人机,包括无人机本体、储液箱、排液管、防护
壳、抽液装置、安装部、弹性管b、三通管、弹性管a和安装管;
8.储液箱安装在无人机本体上,储液箱的出水端通过连接管b连接抽液装置的进液端;抽液装置安装在无人机本体上;无人机本体上设有多个飞行机构和多个支脚,无人机本体内设有主控制组件;
9.排液管连接无人机本体的下端面,排液管上均匀设有多个喷头a,排液管的进液端口通过连接管a连接三通管的一个出液管口;三通管的一个出液管口内设有电磁阀a,三通管的进液管口通过连接管c连接抽液装置的出液端;
10.安装部连接无人机本体的下端面,安装部的下端面沿其中轴线方向设有容纳仓;容纳仓在安装部上设有通孔;容纳仓内设有用于驱动喷液部沿安装部的中轴线方向上下移动的高度调节组件;
11.喷液部的外周面上设有用于实时检测喷液部与地面距离的高度检测组件;高度检测组件通信连接主控制组件;喷液部内设有储液仓;储液仓在喷液部相互远离的两个侧端面设有多个喷头b,储液仓在喷液部的上端面设有进液端口;
12.弹性管b的一端管口连接进液端口,弹性管b的另一端穿过通孔并连接安装管的一端管口;弹性管a的两端管口分别安装管的另一端管口和三通管的另一个出液管口;三通管的另一个出液管口内设有电磁阀b;防护壳连接安装部设有通孔的外端面,防护壳内设有用于驱动安装管往复移动的管路调节组件;
13.主控制组件、管路调节组件、电磁阀a、电磁阀b和抽液装置电性连接。
14.优选的,高度检测组件包括外壳、通讯模块、中央处理器、超声波探头、信号接收模块、计时模块和高度计算模块;
15.外壳通过支架连接喷液部;超声波探头连接外壳的下端面,超声波探头用于向地面发出超声波脉冲信号;
16.通讯模块、中央处理器、超声波探头、信号接收模块、计时模块和高度计算模块均安装在外壳内;
17.中央处理器通信连接用于与主控制组件通讯连接的通讯模块;
18.信号接收模块通信连接中央处理器和超声波探头,信号接收模块用于接收地面反射回的超声波回波信号;
19.计时模块通信连接中央处理器,计时模块用于计算超声波探头发出超声波信号和信号接收模块接收到超声波信号的时间;
20.高度计算模块通信连接中央处理器,高度计算模块用于根据超声波传播时间计算喷液部与地面之间的距离值。
21.优选的,还包括电源模块;电源模块安装在外壳内,电源模块电性连接通讯模块、中央处理器、超声波探头、信号接收模块、计时模块和高度计算模块。
22.优选的,高度调节组件包括齿条板、多个绳索、多个导向轮a、多个导向轮b、齿轮、驱动装置a、滑块和多个绕线轮;
23.齿条板的一端连接喷液部的一端,齿条板的另一端连接滑块,齿条板的端面上均匀设有多个轮齿;滑块滑动连接容纳仓的内壁;
24.驱动装置a连接容纳仓的内壁,驱动装置a的输出轴连接齿轮和多个绕线轮;齿轮啮合连接轮齿;
25.多个导向轮a和多个导向轮b依次并排分布,并均连接容纳仓的内壁;
26.多个绳索的一端均连接喷液部的另一端,多个绳索依次压紧多个导向轮a和多个导向轮b,多个绳索分别连接多个绕线轮。
27.优选的,管路调节组件包括驱动装置b、螺纹杆、导向杆和滑动板;防护壳的端面上设有用于供弹性管a穿过的条形孔;
28.驱动装置b连接防护壳的内壁,驱动装置b传动连接螺纹杆;螺纹杆转动连接防护壳的内壁;螺纹杆螺纹配合连接滑动板;螺纹杆和导向杆分别位于条形孔的两侧;
29.导向杆连接防护壳的内壁,导向杆滑动连接滑动板。
30.优选的,还包括多个紧定件;安装部上设有多个固定板;固定板上设有多个安装孔;无人机本体的底面设有固定架;固定架上设有多个螺纹孔;
31.多个紧定件分别螺纹穿过多个安装孔和多个螺纹孔。
32.优选的,通孔的内壁与安装部的端面采用圆弧过渡连接,通孔的内壁上活动设有多个滚珠;多个滚珠与通孔的中轴线为中心呈圆周均匀分布。
33.优选的,容纳仓在安装部相互远离的两个侧端面设有两个开口。
34.一种农业植保无人机的使用方法,包括上述一种农业植保无人机,具体包括以下步骤:
35.s1、向储液箱内加入待喷洒的液体;
36.s2、选择喷液模式:
37.若选择从待喷液作物上方直接喷液,则继续执行s3;
38.若选择从待喷液作物侧方喷液,则继续执行s4;
39.若选择从待喷液作物上方以及侧方同时喷液,则继续执行s5;
40.s3、在遥控终端上向主控制组件发送指令;主控制组件控制多个飞行机构运行带动无人机本体飞行,直至飞至待喷洒区域;主控制组件控制抽液装置和电磁阀a运行,控制电磁阀b关闭;抽液装置将储液箱内的液体输送沿三通管和连接管a输送至排液管内,液体从多个喷头a喷出;
41.s4、在遥控终端上向主控制组件发送指令,并设定喷液部与地面之间距离值的范围;主控制组件控制多个飞行机构运行带动无人机本体飞行,直至飞至待喷洒区域;
42.主控制组件控制高度调节组件和管路调节组件运行,高度调节组件带动喷液部朝向地面移动,并位于两片农作物之间;高度检测组件运行检测喷液部与地面之间的距离值,并将距离值发送至主控制组件;主控制组件根据得到的距离值智能的控制高度调节组件和管路调节组件运行;
43.主控制组件控制抽液装置和电磁阀b运行,控制电磁阀a关闭;抽液装置将储液箱内的液体输送沿三通管、弹性管a、安装管和弹性管b输送至储液仓内,液体从多个喷头b喷出;
44.s5、在遥控终端上向主控制组件发送指令,并设定喷液部与地面之间距离值的范围;主控制组件控制多个飞行机构运行带动无人机本体飞行,直至飞至待喷洒区域;
45.主控制组件控制高度调节组件和管路调节组件运行,高度调节组件带动喷液部朝向地面移动,并位于两片农作物之间;高度检测组件运行检测喷液部与地面之间的距离值,并将距离值发送至主控制组件;主控制组件根据得到的距离值智能的控制高度调节组件和
管路调节组件运行;
46.主控制组件控制抽液装置、电磁阀b和电磁阀a运行;抽液装置将储液箱内的液体输送至三通管内,并分别沿弹性管a、安装管和弹性管b输送至储液仓内从多个喷头b喷出以及沿连接管a输送至排液管内从多个喷头a喷出。
47.优选的,高度检测组件的使用方法,包括以下具体步骤:
48.s101、超声波探头向地面发出超声波脉冲信号;
49.s102、信号接收模块接收地面反射回的超声波回波信号,此时计时模块计算超声波探头发出超声波信号和信号接收模块接收到超声波信号的时间,得到时间t;
50.s103、高度计算模块根据时间t计算喷液部与地面之间的距离值,得到距离值h;
51.s104、中央处理器将距离值h通过通讯模块发送至主控制组件;
52.s105、主控制组件控制高度调节组件和管路调节组件同步运行。
53.与现有技术相比,本发明的上述技术方案具有如下有益的技术效果:
54.本发明提供的农业植保无人机使用方便,通过设有的排液管和喷液部能实现对农作物从上方或者侧方进行喷药,进而保证对藏在农作物枝干上的害虫进行有效的灭杀;
55.本发明中,使用时根据农作物不同高度以及选择的喷药范围,设定喷液部与地面之间的距离;通过设有的高度调节组件和高度检测组件配合,能智能的调整喷液部与地面的距离,以保证精准的对农作物的枝干进行喷药;通过设有的管路调节组件与高度调节组件配合使用,能避免容纳仓内弹性管b缠绕或与其他部件造成干扰;
56.本发明提供的无人机智能化程度高,能满足农业中对农作物进行喷药杀虫的需求。
附图说明
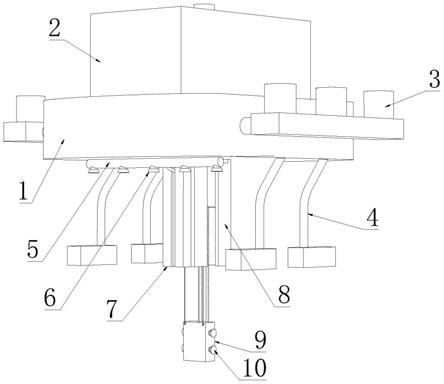
57.图1和图2均为本发明提出的一种实施例的立体图。
58.图3为图2中a处局部放大的结构示意图。
59.图4为本发明的原理框图。
60.图5为图1中安装部的立体结构示意图。
61.图6为图1中喷液部和高度调节组件配合安装的立体结构示意图。
62.图7为图6中b处局部放大的结构示意图。
63.图8为图1中防护壳和管路调节组件配合安装的立体结构示意图。
64.附图标记:1、无人机本体;2、储液箱;3、飞行机构;4、支脚;5、排液管;6、喷头a;7、防护壳;71、条形孔;72、安装管;73、驱动装置b;74、螺纹杆;75、导向杆;76、滑动板;8、安装部;81、容纳仓;82、开口;83、通孔;84、固定板;9、喷液部;91、进液端口;10、喷头b;11、外壳;12、齿条板;13、绳索;14、弹性管b;15、三通管;16、连接管a;17、弹性管a;18、导向轮a;19、导向轮b;20、齿轮;21、驱动装置a;22、滑块;23、绕线轮。
具体实施方式
65.实施例一
66.如图1
‑
5所示,本发明提出的一种农业植保无人机,包括无人机本体1、储液箱2、排液管5、防护壳7、抽液装置、安装部8、弹性管b14、三通管15、弹性管a17、多个紧定件和安装
管72;
67.储液箱2安装在无人机本体1上,储液箱2的出水端通过连接管b连接抽液装置的进液端;抽液装置安装在无人机本体1上;无人机本体1上设有多个飞行机构3和多个支脚4,无人机本体1内设有主控制组件;飞行机构3用于带动无人机本体1飞行;无人机本体1的底面设有固定架;固定架上设有多个螺纹孔;
68.排液管5连接无人机本体1的下端面,排液管5上均匀设有多个喷头a6,排液管5的进液端口通过连接管a16连接三通管15的一个出液管口;三通管15的一个出液管口内设有电磁阀a,三通管15的进液管口通过连接管c连接抽液装置的出液端;
69.进一步的,三通管15连接无人机本体1;
70.安装部8连接无人机本体1的下端面,安装部8的下端面沿其中轴线方向设有容纳仓81;容纳仓81在安装部8上设有通孔83;通孔83的内壁与安装部8的端面采用圆弧过渡连接,通孔83的内壁上活动设有多个滚珠;多个滚珠与通孔83的中轴线为中心呈圆周均匀分布;容纳仓81在安装部8相互远离的两个侧端面设有两个开口82;
71.进一步的,安装部8上设有多个固定板84;固定板84上设有多个安装孔;
72.多个紧定件分别螺纹穿过多个安装孔和多个螺纹孔,多个固定板84压紧无人机本体1的下端,以实现安装部8与无人机本体1的安装,通过上述方式方便对安装部8进行拆卸;
73.容纳仓81内设有用于驱动喷液部9沿安装部8的中轴线方向上下移动的高度调节组件;
74.喷液部9的外周面上设有用于实时检测喷液部9与地面距离的高度检测组件;高度检测组件通信连接主控制组件;喷液部9内设有储液仓;储液仓在喷液部9相互远离的两个侧端面设有多个喷头b10,储液仓在喷液部9的上端面设有进液端口91;
75.弹性管b14的一端管口连接进液端口91,弹性管b14的另一端穿过通孔83并连接安装管72的一端管口;弹性管a17的两端管口分别安装管72的另一端管口和三通管15的另一个出液管口;三通管15的另一个出液管口内设有电磁阀b;防护壳7连接安装部8设有通孔83的外端面,防护壳7内设有用于驱动安装管72往复移动的管路调节组件;
76.主控制组件、管路调节组件、电磁阀a、电磁阀b和抽液装置电性连接,主控制组件控制管路调节组件、电磁阀a、电磁阀b和抽液装置运行,主控制组件包括控制器以及电源等,能收发遥控终端发出的信息,为现有技术对此并不详细说明;
77.本发明的一个实施例中,一种农业植保无人机的使用方法,具体包括以下步骤:
78.s1、向储液箱2内加入待喷洒的液体;上述液体选用但不限于农药;
79.s2、选择喷液模式:
80.若选择从待喷液作物上方直接喷液,则继续执行s3;
81.若选择从待喷液作物侧方喷液,则继续执行s4;
82.若选择从待喷液作物上方以及侧方同时喷液,则继续执行s5;
83.s3、在遥控终端上向主控制组件发送指令;主控制组件控制多个飞行机构3运行带动无人机本体1飞行,直至飞至待喷洒区域;主控制组件控制抽液装置和电磁阀a运行,控制电磁阀b关闭;抽液装置将储液箱2内的液体输送沿三通管15和连接管a16输送至排液管5内,液体从多个喷头a6喷出;
84.s4、在遥控终端上向主控制组件发送指令,并设定喷液部9与地面之间距离值的范
围;主控制组件控制多个飞行机构3运行带动无人机本体1飞行,直至飞至待喷洒区域;
85.主控制组件控制高度调节组件和管路调节组件运行,高度调节组件带动喷液部9朝向地面移动,并位于两片农作物之间;高度检测组件运行检测喷液部9与地面之间的距离值,并将距离值发送至主控制组件;主控制组件根据得到的距离值智能的控制高度调节组件和管路调节组件运行;
86.主控制组件控制抽液装置和电磁阀b运行,控制电磁阀a关闭;抽液装置将储液箱2内的液体输送沿三通管15、弹性管a17、安装管72和弹性管b14输送至储液仓内,液体从多个喷头b10喷出;
87.s5、在遥控终端上向主控制组件发送指令,并设定喷液部9与地面之间距离值的范围;主控制组件控制多个飞行机构3运行带动无人机本体1飞行,直至飞至待喷洒区域;
88.主控制组件控制高度调节组件和管路调节组件运行,高度调节组件带动喷液部9朝向地面移动,并位于两片农作物之间;高度检测组件运行检测喷液部9与地面之间的距离值,并将距离值发送至主控制组件;主控制组件根据得到的距离值智能的控制高度调节组件和管路调节组件运行;
89.主控制组件控制抽液装置、电磁阀b和电磁阀a运行;抽液装置将储液箱2内的液体输送至三通管15内,并分别沿弹性管a17、安装管72和弹性管b14输送至储液仓内从多个喷头b10喷出以及沿连接管a16输送至排液管5内从多个喷头a6喷出;
90.在农作物种植时,在农作物之间会留有排水渠,进而使得农作物之间留有间隙,方便农民在农作物之间行走,在s4和s5中将喷液部9下降至两片农作物之间,从侧方向对农作物进行喷液,在需要对农作物打农药时,从侧方喷药,以保证对农作物的喷药效果。
91.实施例二
92.本发明提出的一种农业植保无人机,相较于实施例一,本实施例还公开了高度检测组件的具体组成;高度检测组件包括外壳11、通讯模块、中央处理器、超声波探头、信号接收模块、计时模块、高度计算模块和电源模块;
93.外壳11通过支架连接喷液部9;超声波探头连接外壳11的下端面,超声波探头用于向地面发出超声波脉冲信号;
94.通讯模块、中央处理器、超声波探头、信号接收模块、计时模块和高度计算模块均安装在外壳11内;
95.中央处理器通信连接用于与主控制组件通讯连接的通讯模块;
96.信号接收模块通信连接中央处理器和超声波探头,信号接收模块用于接收地面反射回的超声波回波信号;
97.计时模块通信连接中央处理器,计时模块用于计算超声波探头发出超声波信号和信号接收模块接收到超声波信号的时间;
98.高度计算模块通信连接中央处理器,高度计算模块用于根据超声波传播时间计算喷液部9与地面之间的距离值;
99.电源模块安装在外壳内,电源模块电性连接通讯模块、中央处理器、超声波探头、信号接收模块、计时模块和高度计算模块,通过设有的电源模块为高度检测组件上的电气元件供电;
100.本发明的一个实施例中,高度检测组件的使用方法,包括以下具体步骤:
101.s101、超声波探头向地面发出超声波脉冲信号;
102.s102、信号接收模块接收地面反射回的超声波回波信号,此时计时模块计算超声波探头发出超声波信号和信号接收模块接收到超声波信号的时间,得到时间t;
103.s103、高度计算模块根据时间t计算喷液部9与地面之间的距离值,得到距离值h;
104.s104、中央处理器将距离值h通过通讯模块发送至主控制组件;
105.s105、主控制组件控制高度调节组件和管路调节组件同步运行;
106.本发明中通过设有的超声波探头发出超声波脉冲信号并通过信号接收模块进行信号接收,计算接收到超声波脉冲信号的时间,并通过高度计算模块快速计算出喷液部9与地面之间的距离值,通过上述方式进行高度检测响应速度快,能实现实时对喷液部9与地面之间的距离值进行检测,以满足无人机在飞行过程中对喷液部9与地面之间的距离值检测的需求。
107.实施例三
108.如图6
‑
7所示,本发明提出的一种农业植保无人机,相较于实施例一,本实施例还公开了高度调节组件的具体结构;高度调节组件包括齿条板12、多个绳索13、多个导向轮a18、多个导向轮b19、齿轮20、驱动装置a21、滑块22和多个绕线轮23;
109.齿条板12的一端连接喷液部9的一端,齿条板12的另一端连接滑块22,齿条板12的端面上均匀设有多个轮齿;滑块22滑动连接容纳仓81的内壁;
110.驱动装置a21连接容纳仓81的内壁,驱动装置a21的输出轴连接齿轮20和多个绕线轮23;齿轮20啮合连接轮齿;驱动装置a21选用变频电机,驱动装置a21与主控制组件控制连接;
111.多个导向轮a18和多个导向轮b19依次并排分布,并均连接容纳仓81的内壁;
112.多个绳索13的一端均连接喷液部9的另一端,多个绳索13依次压紧多个导向轮a18和多个导向轮b19,多个绳索13分别连接多个绕线轮23。
113.本发明的一个实施例中,
114.当将喷液部9收纳在容纳仓81内时,驱动装置a21运行带动齿轮20和多个绕线轮23旋转,齿轮20啮合连接齿条板12上的轮齿以驱动齿条板12和滑块22在容纳仓81内壁向上滑动,多个绳索13分别缠绕在多个绕线轮23上,喷液部9朝向靠近安装部8的一侧移动,直至将喷液部9收纳在容纳仓81内;
115.当将喷液部9从容纳仓81内脱离出时,驱动装置a21运行带动齿轮20和多个绕线轮23旋转,齿轮20啮合连接齿条板12上的轮齿以驱动齿条板12和滑块22在容纳仓81内壁向下滑动,多个绳索13分别从多个绕线轮23上分离,喷液部9朝向远离安装部8的一侧移动。
116.实施例四
117.如图8所示,本发明提出的一种农业植保无人机,相较于实施例一,本实施例还公开了管路调节组件的具体结构;管路调节组件包括驱动装置b73、螺纹杆74、导向杆75和滑动板76;防护壳7的端面上设有用于供弹性管a17穿过的条形孔71;
118.驱动装置b73连接防护壳7的内壁,驱动装置b73传动连接螺纹杆74;驱动装置b73选用变频电机,驱动装置b73与主控制组件控制连接;
119.螺纹杆74转动连接防护壳7的内壁;螺纹杆74螺纹配合连接滑动板76;螺纹杆74和导向杆75分别位于条形孔71的两侧;
120.导向杆75连接防护壳7的内壁,导向杆75滑动连接滑动板76。
121.本发明的一个实施例中,使用时,当高度调节组件运行调整喷液部9与地面的距离时,通过启动管路调节组件调整弹性管a17和弹性管b14,以保证液体能输送至喷液部9内的储液仓内;
122.当喷液部9朝向地面移动时,驱动装置b73运行驱动螺纹杆74运行,进而滑动板76和安装管72沿导向杆75的长度方向上移,弹性管b14更多的部分从通孔83伸入容纳仓81内;
123.当喷液部9朝向安装部8移动以收纳在容纳仓81内时,驱动装置b73运行驱动螺纹杆74运行,进而滑动板76和安装管72沿导向杆75的长度方向下移,弹性管b14更多的部分从通孔83伸出容纳仓81,避免弹性管b14在容纳仓81内与其他部件发送缠绕。
124.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1