一种用于无人机的混动系统及供电控制方法
1.本发明涉及无人机供电领域,特别涉及一种用于无人机的混动系统及供电控制方法。
背景技术:
2.电池驱动无人机发展迅速、应用甚广,但在如巡检、测绘、植保等部分应用领域,因其需要挂载专用设备,其续航里程、续航时间大打折扣,执行一次任务往往需要多个电池组,增加了使用成本。燃油驱动无人机相比与电池驱动无人机,其功率密度大大提高,可大载重、长时间航行,但因发动机的功率输出稳定性较差,导致燃油供电无人机的操作难度加大,安全性大有隐患。在此基础,混动系统应运而生,其由发动机提供高功率密度的动力来源,由挂载的锂电池来自然调控动力组的输出功率,综合了燃油能量密度大、电池放电性能稳定两者优点,实现了无人机的大载重、长时间的稳定航行。
3.混动系统主要由发动机、油箱、整流装置、控制系统、蓄电池组成,发动机通过燃烧燃油输出机械能,由启动、发电一体机将其转化为电能,通过整流桥输出直流电以供电机消耗、充能蓄电池。混动无人机的关键在于其供电问题,有厂商选择其混动系统的发动机输出恒功率的输出给电池包充电,当电池包电能充足,使用电池包单独给无人机供电,当功率不足则使用发动机与电池包共同给无人机供电,这样的供电方式类似于增程式电动汽车,其优点在于发动机端控制简单,逻辑清晰,但是该种方式需要挂载大容量的蓄电池,意味着无人机需要挂载多个电池包,因电池包而消耗的载重增加,无人机的功耗随之提高,空中飞行的安全性也随电池包的增多而减小,而且频繁的充放电也会减少电池包的寿命,更换电池包的成本也大大增加。
4.如何减少电池包的使用,稳定供电总线的功率输出、提高飞行安全性是一个待解决的问题。
技术实现要素:
5.针对现有技术的不足,本发明提供了一种用于无人机的混动系统,同时提供一种用于无人机的供电控制方法,该系统和供电控制方法的功率输出稳定,提高无人机的飞行可靠性。
6.本发明通过以下技术方案实现:
7.一种用于无人机的混动系统,包括:动力系统、功率输出控制系统和信号处理系统,所述功率输出控制系统同时与动力系统、信号处理系统以及供电总线连接,所述动力系统和信号处理系统连接;
8.所述功率输出控制系统包括功率输出控制模块和超级电容组,所述信号处理系统包括控制模块和通讯模块,所述输出控制模块的一端同时与所述供电总线和所述超级电容组连接、另一端和所述控制模块连接,所述控制模块一端和所述通讯模块连接,另一端和所述动力系统连接;
9.功率输出控制模块采集供电总线的输出电流电压值,将数据发送给所述控制模块,所述控制模块接受到信号后做出逻辑判断控制所述动力系统的功率输出,同时,通讯模块接受来自地面端的指令,通讯模块将地面端指令发送给所述控制模块,所述控制模块根据指令对控制动力系统的信息进行补偿。进一步的,所述功率输出控制系统还包括dc/dc稳压模块,所述dc/dc稳压模块输入端与所述动力系统输出端连接,输出端与所述功率输出控制模块连接,用于将所述动力系统输出的直流电压稳定到目标电压。
10.进一步的,所述功率输出控制系统还包括后备电池组,所述后备电池组和所述超级电容组连接且由若干块锂电池串联组成。
11.进一步的,所述动力系统包括发动机、节气门控制机构、发电启动一体机和ac/dc整流模块,所述发动机一端和所述节气门控制机构连接、另一端和所述发电启动一体机连接;所述ac/dc整流模块一端和所述发电启动一体机连接、另一端和所述dc/dc稳压模块连接,所述ac/dc整流模块和所述功率输出控制模块连接,所述节气门控制机构和所述控制模块连接。
12.进一步的,本发明提供了一种用于无人机的供电控制方法,包括,
13.当地面端无操作指令时,并且无人机需求功率稳定:
14.功率输出控制模块采集供电总线的电压信号值,判断需求电压变化;
15.功率输出控制模块和超级电容组配合进行功率输出;
16.当地面端有操作指令时,并且无人机需求功率稳定:
17.控制模块根据地面端的指令对发动机的油门信息进行的补偿,且随着无人机需求功率的增大一同增大发动机的输出功率;
18.功率输出控制模块采集供电总线的电压信号值,判断需求电压变化;
19.功率输出控制模块和超级电容组配合进行功率输出。
20.进一步的,所述步骤:功率输出控制模块采集供电总线的电压信号值,判断需求电压变化中具体包括如下步骤:
21.所述控制模块能够实时根据功率输出控制模块采集到的供电总线电流值、电压值得到供电总线的实时电压、电流状态;
22.所述控制模块能够根据采集到的实时电压、电流状态判断是否需要发送信号控制节气门控制机构增加或减小发动机的输出功率。
23.进一步的,所述节气门控制机构和油门连接,所述油门发出的油门信息用于控制所述节气门控制机构,进而控制发动机的动力输出。
24.进一步的,所述步骤:控制模块根据地面端的指令对发动机的油门信息进行补偿,且随着无人机需求功率的增大一同增大发动机的输出功率中具体包括以下步骤:
25.所述控制模块能够通过对地面端油门信号采用前馈控制方法,对控制模块给节气门控制机构发送的信号做出补偿;
26.当所述地面端的油门信号增大时,控制模块实时收到信号,并发送信号指令在无人机需求功率增大时同步补偿节气门控制信号,使功率输出控制模块在检测到供电总线的电压下降前提前增大发动机功率,减小因功率输出控制模块参考供电总线的电压值、电流值迟滞产生的影响。
27.相比于现有技术,本发明的优点在于:
28.1、通过前馈控制的思路,能够在地面端发送运动指令的同时调整发动机的功率输出,防止因无人机需求功率突变造成的电压大幅下降,轻则飞行指令执行迟缓,重则影响飞行安全。在供电总线上并联有一超级电容组,可以稳定需求功率变化时的电压输出。因本控制思想而设计的功率输出控制模块能够控制电流的输出方向,不飞行时可以对备用电池组充电,飞行中可以给无人机直接供电,发动机意外熄火可以用来空中启动发动机。提高了混动系统的通用性,提高了无人机飞行时的安全性。
附图说明
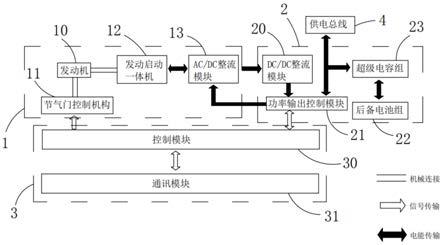
29.图1为本发明一实施例的混动系统直接供电以及信号传输的结构示意图;
30.图2为混动系统直接供电方式方法的流程图。
[0031]1‑
动力系统、10
‑
发电机、11
‑
节气门控制机构、12
‑
发电启动一体机、13
‑
ac/dc整流模块;2
‑
功率输出控制系统、20
‑
dc/dc稳压模块、21
‑
功率输出控制模块、22
‑
后备电池组、23
‑
超级电容组;3
‑
信号处理系统、30
‑
控制模块、31
‑
通讯模块;4
‑
供电总线。
具体实施方式
[0032]
以下结合较佳实施例及其附图对发明技术方案作进一步非限制性的详细说明。在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0033]
如图1所示,本发明一实施例的一种用于无人机的混动系统,包括动力系统1、功率输出控制系统2和信号处理系统3,所述功率输出控制系统2同时与动力系统1、信号处理系统3以及供电总线4连接,所述动力系统1和信号处理系统连接3;功率输出控制系统2用来采集所述动力系统1和供电总线4的输出电流电压值、将数据发送给所述信号处理系统3,同时控制电路中的电流方向;动力系统1是无人机的动力来源,信号处理系统3用来处理功率输出控制系统2传递过来的信号,利用该信号做出逻辑判断控制动力系统1的功率输出。
[0034]
动力系统1包括发动机10、节气门控制机构11、发电启动一体机12和ac/dc整流模块13,发动机10一端和节气门控制机构11连接、另一端和发电启动一体机12连接;ac/dc整流模块13一端和发电启动一体机12连接、另一端和功率输出控制系统2连接,节气门控制机构11和信号处理系统3连接。发动机10将燃烧燃油产生机械能,发电启动一体机12负责将发动机10产生的机械能转化为电能。ac/dc整流模块13主要将发电启动一体机12产生的三相电能转化为可供无人机使用的直流电;节气门控制机构11主要接信号处理系统3的信号调整发动机10输出功率的大小。
[0035]
功率输出控制系统2包括dc/dc稳压模块20、功率输出控制模块21、后备电池组22和超级电容组23,dc/dc稳压模块20的输入端与ac/dc整流模块13的输出端连接、其输出端
与功率输出控制模块21连接,功率输出控制模块21一端与信号处理系统3连接、一端与ac/dc整流模块13连接,一端与同时与供电总线4和超级电容组23连接;后备电池组22和超级电容组23连接;后备电池组22可用于发动机10的启动;超级电容组23用于在无人机系统功率突变时稳定系统的电压;dc/dc稳压模块20用于将ac/dc整流模块13输出的直流电稳定到目标电压。
[0036]
功率输出控制模块21由微型控制器与电源管理电路组成,用于采集动力系统1的电流电压值、供电总线4的电流电压值,发送数据至信号处理系统3,与电源管理电路配合控制电流的输出方向,并且可以接收信号处理系统3的指令控制节气门控制机构11调节发动机10的输出功率。
[0037]
后备电池组22由多个锂电池组成,主要用于发动机10的启动,以及空中发动机熄火时能够保持时间的悬停并且空中启动发动机10。
[0038]
超级电容组23由多个超级电容与电子元器件组成,配合信号处理系统3的控制方法和dc/dc稳压模块20给发动机10提供发动机10实时所需要的功率,可以在无人机系统功率突变时稳定系统的电压。
[0039]
信号处理系统3包括控制模块30和通讯模块31,控制模块30一端和通讯模块31连接、一端和功率输出控制模块21连接,一端和节气门控制机构11连接,用于和通讯模块31、功率输出控制系统21的信息交互,并产生控制所述节气门控制机构11信号;通讯模块31用于与地面端进行信息交互。
[0040]
如图2所示,本发明一实施例的一种用于无人机的供电控制方法,包括:
[0041]
当地面端无操作指令时,并且无人机需求功率稳定:
[0042]
功率输出控制模块21采集供电总线4的电压信号值,判断需求电压变化;
[0043]
功率输出控制模块21和超级电容组23配合进行功率输出。
[0044]
当地面端有操作指令时,并且无人机需求功率稳定:
[0045]
控制模块30根据地面端的指令对发动机10的油门信息进行补偿,且随着无人机需求功率的增大一同增大发动机10的输出功率;
[0046]
功率输出控制模块21采集供电总线4的电压信号值,判断需求电压变化;
[0047]
功率输出控制模块21和超级电容组23配合进行功率输出。
[0048]
其中,步骤:功率输出控制模块21采集供电总线4的电压信号值,判断需求电压变化中具体包括如下步骤:
[0049]
控制模块30能够实时根据功率输出控制模块21采集到的供电总线4电流值、电压值得到供电总线4的实时电压、电流状态;
[0050]
控制模块30能够根据采集到的实时电压、电流状态判断是否需要发送信号控制节气门控制机构11增加或减小发动机10的输出功率。
[0051]
步骤:控制模块30根据地面端的指令对发动机10的油门信息进行补偿,且随着无人机需求功率的增大一同增大发动机10的输出功率中的油门信息具体为:
[0052]
节气门控制机构11和油门连接,油门发出的油门信息用于控制所述节气门控制机构11,进而控制发动机10的动力输出。
[0053]
步骤:控制模块30根据地面端的指令对发动机10的油门信息进行补偿,且随着无人机需求功率的增大一同增大发动机10的输出功率中具体包括如下步骤:
[0054]
控制模块30能够通过对地面端油门信号采用前馈控制方法,对控制模块30给节气门控制机构11发送的信号做出补偿;
[0055]
当所述地面端的油门信号增大时,控制模块30实时收到信号,并发送信号指令在无人机需求功率增大时同步补偿节气门控制信号,使功率输出控制模块21在检测到供电总线4的电压下降前提前增大发动机10功率,减小因功率输出控制模块21参考供电总线4的电压值、电流值迟滞产生的影响。
[0056]
具体地,在正常飞行中,无人机需求功率稳定,控制模块30将根据供电总线4的电压变化调整发动机10的功率输出,经过ac/dc整流模块13、dc/dc稳压模块20和超级电容组23配合给供电总线4提供稳定的电源输出。
[0057]
当检测到供电总线4的电流值上升、电压值有下降的趋势,控制模块30认为无人机的工作负载正在增加将会通过控制节气门控制机构11增大发动机10的功率输出。
[0058]
当检测到供电总线4电压值有上升的趋势,控制模块30将通过控制节气门控制机构11减小发动机10的功率输出。
[0059]
在一般的控制模式中,控制模块30对于发动机10功率输出的控制是基于供电总线4的电压信号值调整发动机10的输出功率,当检测到供电总线4电压下降时再去提高发动机10的输出功率是会有一个迟滞的时间,此时供电总线4的电压下降迅速,地面端的指令发生迟滞。
[0060]
在一般控制模式的基础上,控制模块30在地面端发送完控制指令后收到通讯模块31传递来的地面端的指令信息,随无人机功率需求增大的同时给对发动机10的油门信息进行补偿,在功率输出控制模块21检测到供电总线4电压下降前增大发动机10的功率输出,减小因迟滞造成电压大幅下降带来的影响,发动机10油门补偿信号基于地面端控制指令、无人机的载重配置、发动机的实验数据经过多次实验得到的拟合公式计算而来。
[0061]
具体计算公式如下:
[0062]
油门总信号=油门信号+补偿信号(这里信号量值可理解为百分比占空比),
[0063]
油门信号实时跟随供电总线4电压信号,随其波动,当地面端无控制指令时补偿信号为0,油门总信号的值为油门信号。
[0064]
无补偿信号的无人机,根据实验得到,混合动力无人机运动时油门信号占空比波动范围为20%~90%,无人机悬停时的油门信号占空比为50%左右,此处数据仅为示例,根据节气门操作机构选择的机构、油门信号初值设定、发动机型号等因素的变化而变化。
[0065]
补偿信号=80%*补偿系数+20%*变化速率系数,
[0066]
补偿系数为油门信号与发动机输出功率线性关系曲线计算出的系数经过进一步处理而得,补偿系数与变化速率系数之和小于40%,补偿系值在25%范围内变化,根据地面端控制指令输出值大小变化而变化;变化速率系数值在10%范围内变化,根据地面端控制指令输出值变化速率的大小变化而变化。
[0067]
当补偿信号参与油门总信号的输出时:
[0068]
油门总信号=油门信号+80%*补偿系数+20%*变化速率系数,
[0069]
当地面端传来控制指令时,无人机功率需求瞬时增大,由于油门信号参考供电总线电压,但这一瞬时总线电压瞬时变化不大,导致其油门信号变化产生时间上迟滞,此时补偿信号发挥作用,补偿系数跟随地面端信号大小而变化,其值与无人机功率需求同步增大,
及时提高油门总信号值,增大发动机的功率输出,同时超级电容组参与稳压,减小因发动机功率输出迟滞而造成的影响,后续供电总线电压值下降后油门信号同步增大,补偿超级电容组提供的功率。同时变化速率系数是根据地面端控制信号输出值变化速率而变化的,会根据无人机功率需求变化产生补偿信号。本发明提出的一种用于无人机的混动系统及供电控制方法,该方式方法能够稳定供电总线的功率输出、提高飞行安全性,基于前馈控制理论,能够减少发动机的功率调整时间,输出功率可直接提供给无人机使用。
[0070]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1