一种多旋翼无人机及夜间快速建模方法与流程
1.本发明涉及无人机建模技术领域,尤其涉及一种多旋翼无人机及夜间快速建模方法。
背景技术:
2.随着无人机的普及,无人机低空摄影、图像三维建模测量技术快速发展。但现有的无人机建模技术拍摄方式死板,拍摄角度单一,造成拍摄死角,此外拍摄受光线影响大,特别是夜间,导致建模精度不高。
技术实现要素:
3.针对背景技术中存在的问题,提出一种多旋翼无人机及夜间快速建模方法。本发明设置摄像组件,实现360度无死角拍摄,增大拍摄的灵活性和高效性,提高了建模的精准度。设置调节组件和连接组件配合,方便对摄像件进行收纳,有效保护摄像头。此外本发明通过建模平台获得实时位置信息和飞行信息,进行数据采集、校正、传输,实现了夜间建模的高效性、实时性、智能性和精准性。
4.本发明提出一种多旋翼无人机,包括机体、支撑组件、伸缩罩、调节组件、连接组件、摄像组件和建模平台;建模平台设置在机体上,与电脑通讯连接;支撑组件设置两组,位于机体的底部两侧;伸缩罩设置在两组支撑组件之间;调节组件设置在伸缩罩和支撑组件之间,用于调节伸缩罩和支撑组件的伸缩;摄像组件设置在伸缩罩内,通过连接组件和调节组件配合,实现摄像端的升降。摄像组件包括安装管、伸缩杆、安装板、驱动件、安装座和摄像件;安装管上端连接机体,下端连接滑动的伸缩杆;安装板设置在伸缩杆上;安装座通过驱动件传动,转动设置在安装板的下端;摄像件设置多组,呈放射状排布在安装座上,且通过驱动件传动,实现在安装座上的移动。摄像件包括移动套、连接杆、电机一和摄像头;安装座的底部设置导向槽;移动套滑动设置在导向槽上;通过电机一传动的连接杆一端与移动套转动连接,另一端连接摄像头。
5.优选的,摄像件还包括光源和超声波传感器;光源和超声波传感器均设置在安装座上;摄像头为1英寸以下的感光coms相机,具有1000
‑
2000万像素。
6.优选的,驱动件包括安装架、电机二、齿轮一、齿轮二、丝杠、移动块和电机三;安装板和安装座构成安装室;安装室底部设置连通导向槽的开口;安装架设置在安装室内;电机二设置在安装架的下端,主轴与齿轮一键连接;丝杠对应开口位置,转动设置安装室下端;齿轮二键连接丝杠的一端,同时与齿轮一啮合;移动块上端与丝杠螺纹配合,下端穿过开口,连接移动套;电机三设置在安装架的上端,主轴与安装板连接。
7.优选的,齿轮二设置数量与摄像组件数量匹配,多组齿轮二围绕齿轮一外周设置。
8.优选的,安装座的底部设置收纳筒;收纳筒与齿轮一同轴,侧壁上设置有与摄像头一一对应的收纳槽。
9.优选的,支撑组件包括支撑架、支撑杆和缓冲弹簧;支撑架为u型,其两侧的竖直段
设置滑槽;支撑杆设置两组,每组支撑杆的上端连接机体,下端伸入对应侧的滑槽,与支撑架滑动连接;缓冲弹簧套在支撑杆上,上端连接机体,下端连接支撑架。
10.优选的,调节组件包括电机四、连接块和调节绳;电机四设置在机体上,主轴连接绕线辊;伸缩罩上端连接机体,下端设置有加重框;连接块设置在支撑架和加重框之间;调节绳连接绕线辊和连接块。
11.优选的,连接组件包括牵引绳、转轴和防滑套;转轴转动设置在安装管的外侧;防滑套套在转轴上;牵引绳绕接在防滑套上,一端连接安装板,另一端连接加重框。
12.优选的,建模平台包括数据采集模块、地形视觉模块、飞行轨迹设置模块、数据校正模块、通信模块、控制模块和数据传输模块。
13.本发明又提供一种多旋翼无人机的夜间快速建模方法,步骤如下:
14.s1、起飞前,通过飞行轨迹设置模块设置飞行轨迹,确定待拍摄物体位置;
15.s2、机体起飞后,通过地形视觉模块获得实时位置信息和飞行信息,并传输回电脑;
16.s3、机体移动至待拍摄物体外围,根据提前设置的飞行轨迹,飞行到指定位置,在以待拍摄物体为圆心,提前设定半径,做出的圆周上设置18
‑
24拍摄点,开始移动、拍摄;
17.s4、拍摄过程中,首先调节组件和连接组件配合,电机四带动绕线辊转动,调节绳缩短,拉起连接块,支撑架顺着支撑杆上升,同时加重框带动伸缩罩上升,这个过程中由于牵引绳和安装板连接,使得伸缩杆滑出安装管,摄像件伸出伸缩罩;
18.s5、驱动件工作,电机二驱动,齿轮一、齿轮二传动,使得丝杠转动,摄像件同步朝向安装座外围移动,调节与待拍摄物体的距离,连接杆旋转,带动每组摄像件上的摄像头旋转,调节单个摄像角度,电机三带动安装座旋转,进一步调节单个摄像角度;
19.s6、光源补光,摄像头从不同角度、不同位置拍摄物体的图像,数据采集模块获取拍摄数据,数据校正模块对所有的数据汇总,并校正后将拍摄到照片传输到电脑端进行三维快速建模,拍摄过程中超声波传感器提供避障功能;
20.s7、拍摄结束后,调节组件和连接组件配合,支撑架和伸缩罩下移,摄像件缩回伸缩罩,连接杆反向旋转至与移动套贴合,最后卡入收纳槽。
21.与现有技术相比,本发明具有如下有益的技术效果:
22.本实施例设置摄像组件,调节与待拍摄物体的距离以及单个摄像角度。实现了360度无死角拍摄,增大了拍摄的灵活性和高效性,提高了建模的精准度。设置调节组件和连接组件配合,实现摄像件进出伸缩罩。方便在雨雪天气或非工作状态下对摄像件进行收纳,有效保护摄像头。通过建模平台获得实时位置信息和飞行信息,进行数据采集、校正、传输,实现了建模的高效性、实时性、智能性和精准性,便于夜间建模。
附图说明
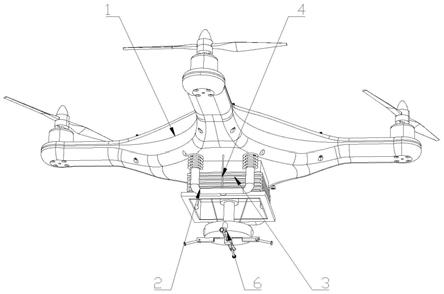
23.图1为本发明一种实施例第一视角的结构示意图;
24.图2为本发明一种实施例第二视角的结构示意图;
25.图3为本发明一种实施例第三视角的结构示意图;
26.图4为本发明一种实施例中连接组件的非工作状态仰视图;
27.图5为本发明一种实施例中连接组件的非工作状态侧视图;
28.图6为本发明一种实施例中连接组件的工作状态侧视图;
29.图7为图6中a处的结构示意图;
30.图8为本发明一种实施例中安装室的内部结构示意图。
31.附图标记:1、机体;2、支撑组件;3、伸缩罩;4、调节组件;5、连接组件;6、摄像组件;7、支撑架;8、支撑杆;9、缓冲弹簧;10、连接块;11、调节绳;12、牵引绳;13、转轴;14、防滑套;15、安装管;16、伸缩杆;17、安装板;18、安装座;19、移动套;20、加重框;21、电机一;22、摄像头;23、导向槽;24、收纳筒;25、收纳槽;26、安装架;27、电机二;28、齿轮一;29、齿轮二;30、丝杠;31、移动块;32、电机三;33、光源;34、摄像件;35、连接杆。
具体实施方式
32.实施例一
33.如图1
‑
8所示,本发明提出的一种多旋翼无人机,包括机体1、支撑组件2、伸缩罩3、调节组件4、连接组件5、摄像组件6和建模平台;建模平台设置在机体1上,与电脑通讯连接;支撑组件2设置两组,位于机体1的底部两侧;伸缩罩3设置在两组支撑组件2之间;调节组件4设置在伸缩罩3和支撑组件2之间,用于调节伸缩罩3和支撑组件2的伸缩;摄像组件6设置在伸缩罩3内,通过连接组件5和调节组件4配合,实现摄像端的升降。
34.摄像组件6包括安装管15、伸缩杆16、安装板17、驱动件、安装座18和摄像件34;安装管15上端连接机体1,下端连接滑动的伸缩杆16;安装板17设置在伸缩杆16上;安装座18通过驱动件传动,转动设置在安装板17的下端;摄像件34设置多组,呈放射状排布在安装座18上,且通过驱动件传动,实现在安装座18上的移动。驱动件包括安装架26、电机二27、齿轮一28、齿轮二29、丝杠30、移动块31和电机三32;安装板17和安装座18构成安装室;安装室底部设置连通导向槽23的开口;安装架26设置在安装室内;电机二27设置在安装架26的下端,主轴与齿轮一28键连接;丝杠30对应开口位置,转动设置安装室下端;齿轮二29设置数量与摄像组件6数量匹配,多组齿轮二29围绕齿轮一28外周设置,键连接丝杠30的一端,同时与齿轮一28啮合;移动块31上端与丝杠30螺纹配合,下端穿过开口,连接移动套19;电机三32设置在安装架26的上端,主轴与安装板17连接。安装座18的底部设置收纳筒24;收纳筒24与齿轮一28同轴,侧壁上设置有与摄像头22一一对应的收纳槽25,便于在非工作状态下,对摄像头22进行收纳,提供一定的保护。
35.摄像件34包括移动套19、连接杆35、电机一21和摄像头22;安装座18的底部设置导向槽23;移动套19滑动设置在导向槽23上;通过电机一21传动的连接杆35一端与移动套19转动连接,另一端连接摄像头22。摄像件34还包括光源33和超声波传感器;光源33和超声波传感器均设置在安装座18上;光源33为近红外灯,发出的光是介于可见光和中红外光之间的电磁波。摄像头22为1英寸以下的感光coms相机,具有1000
‑
2000万像素,可以在夜间捕捉到环境中的红外线的反馈,提高夜间拍摄的清晰度。
36.本实施例设置摄像组件6,通过驱动件工作,带动摄像件34同步朝向安装座18外围移动,调节与待拍摄物体的距离,连接杆35旋转,带动每组摄像件34上的摄像头22旋转,调节单个摄像角度,安装座18旋转,进一步调节单个摄像角度。实现了360度无死角拍摄,增大了拍摄的灵活性和高效性,提高了建模的精准度。
37.实施例二
38.如图1
‑
6所示,在上述实施例的基础上,本实施例中支撑组件2包括支撑架7、支撑杆8和缓冲弹簧9;支撑架7为u型,其两侧的竖直段设置滑槽;支撑杆8设置两组,每组支撑杆8的上端连接机体1,下端伸入对应侧的滑槽,与支撑架7滑动连接;缓冲弹簧9套在支撑杆8上,上端连接机体1,下端连接支撑架7。调节组件4包括电机四、连接块10和调节绳11;电机四设置在机体1上,主轴连接绕线辊;伸缩罩3上端连接机体1,下端设置有加重框20;连接块10设置在支撑架7和加重框20之间;调节绳11连接绕线辊和连接块。连接组件5包括牵引绳12、转轴13和防滑套14;转轴13转动设置在安装管15的外侧;防滑套14套在转轴13上;牵引绳12绕接在防滑套14上,一端连接安装板17,另一端连接加重框20。
39.本实施例设置调节组件4和连接组件5配合,通过电机四带动绕线辊转动,调节绳11伸缩,支撑架7和伸缩罩3同步伸缩,这个过程中由于牵引绳12和安装板17连接,使得摄像件34进出伸缩罩3。方便在雨雪天气或非工作状态下对摄像件34进行收纳,有效保护摄像头22。
40.实施例三
41.在上述实施例的基础上,本实施例中建模平台包括数据采集模块、地形视觉模块、飞行轨迹设置模块、数据校正模块、通信模块、控制模块和数据传输模块。通信模块采用4g/5g通信技术。
42.本实施例通过建模平台获得实时位置信息和飞行信息,进行数据采集、校正、传输,实现了建模的高效性、实时性、智能性和精准性。
43.实施例四
44.在上述实施例的基础上,本实施例又提供一种多旋翼无人机的夜间快速建模方法,步骤如下:
45.s1、起飞前,通过飞行轨迹设置模块设置飞行轨迹,确定待拍摄物体位置;
46.s2、机体1起飞后,通过地形视觉模块获得实时位置信息和飞行信息,并传输回电脑;
47.s3、机体1移动至待拍摄物体外围,根据提前设置的飞行轨迹,飞行到指定位置,在以待拍摄物体为圆心,提前设定半径,做出的圆周上设置18
‑
24拍摄点,开始移动、拍摄;
48.s4、拍摄过程中,首先调节组件4和连接组件5配合,电机四带动绕线辊转动,调节绳11缩短,拉起连接块10,支撑架7顺着支撑杆8上升,同时加重框20带动伸缩罩3上升,这个过程中由于牵引绳12和安装板17连接,使得伸缩杆16滑出安装管15,摄像件34伸出伸缩罩3;
49.s5、驱动件工作,电机二27驱动,齿轮一28、齿轮二29传动,使得丝杠30转动,摄像件34同步朝向安装座18外围移动,调节与待拍摄物体的距离,连接杆35旋转,带动每组摄像件34上的摄像头22旋转,调节单个摄像角度,电机三32带动安装座18旋转,进一步调节单个摄像角度;
50.s6、光源33补光,摄像头22从不同角度、不同位置拍摄物体的图像,数据采集模块获取拍摄数据,数据校正模块对所有的数据汇总,并校正后将拍摄到照片传输到电脑端进行三维快速建模,拍摄过程中超声波传感器提供避障功能;
51.s7、拍摄结束后,调节组件4和连接组件5配合,支撑架7和伸缩罩3下移,摄像件34缩回伸缩罩3,连接杆35反向旋转至与移动套19贴合,最后卡入收纳槽25。
52.本实施例中的多旋翼无人机的夜间快速建模方法,操作简单,拍摄范围大,灵活性、实用性、智能性强,便于夜间建模。
53.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1