一种炉内空间自主导航的无人机的制作方法
1.本发明涉及无人机领域,具体而言,涉及一种炉内空间自主导航的无人机。
背景技术:
2.目前为止在发电厂锅炉内部等密闭的空间内进行巡检方案为人工手动控制无人机进行巡检,炉内空间为封闭空间,封闭空间主要特点是不具备卫星定位信号,在不具备卫星定位信号的情况下无人机无法进行定位自主飞行,过程中飞机飞行位置需要飞手实时控制并且不能知道飞机实时的绝对位置信息,飞行位置不准对操作人员要求高,作业效果差,此外,飞机不具备防护结构,在巡检过程中有较大概率与障碍物发生碰撞,进而导致无人机失衡不能执行飞行作业。
3.有鉴于此,特提出本发明。
技术实现要素:
4.本发明的目的在于提出一种炉内空间自主导航的无人机,以解决现有技术中封闭空间不具备卫星定位信号的情况下无人机无法进行定位自主飞行,飞行位置不准对操作人员要求高,作业效果差以及飞机不具备防护结构,在巡检过程中有较大概率与障碍物发生碰撞,进而导致无人机失衡不能执行飞行作业的问题。
5.为达到上述目的,本发明的技术方案是这样实现的:
6.一种炉内空间自主导航的无人机,所述炉内空间自主导航的无人机包括设置在中间的机身主体和设置在四角的螺旋桨装置,在所述机身主体上设置激光雷达定位装置和可伸缩组件,在所述螺旋桨装置上设置防护结构,所述激光雷达定位装置设置在所述机身主体的上方。
7.在机身主体上设置激光雷达定位装置,使得炉内空间的无人机可以实现自主导航、自主定位飞行;激光雷达定位装置设置在机身主体的上方,可以在最大程度上发挥激光雷达作用,降低其他装置激光遮挡角度的影响,从而使得收集到较大的数据范围信息,进而提高炉内空间自主导航的无人机的定位精度;在螺旋桨装置上设置防护结构可以有效避免无人机在巡检过程中与障碍物发生碰撞。
8.进一步的,所述激光雷达定位装置与所述机身主体刚性连接,所述螺旋桨装置与所述防护结构刚性连接。
9.该设置保证炉内空间自主导航的无人机整体结构的完整性,降低多余震动,从而提高控制精度。
10.进一步的,所述防护结构安装在螺旋桨装置的外侧。
11.该设置用于保护螺旋桨在巡检过程中不受外部障碍物碰撞,从而能够提高炉内空间自主导航的无人机飞行的安全性。
12.进一步的,所述防护结构包括防护环和连接块,所述连接块安装在所述防护环的内侧。
13.该设置提高防护结构的稳定性,从而进一步提高炉内空间自主导航的无人机飞行的安全性。
14.进一步的,在所述机身主体的下方设置摄像装置。
15.该设置用于保护摄像装置在巡检过程中不受外部障碍物碰撞,从而能够提高炉内空间自主导航的无人机飞行的安全性。
16.进一步的,在所述机身主体的下方设置起落装置。
17.进一步的,所述起落装置包括支撑结构和接地结构,所述支撑结构与所述接地结构可拆卸连接。
18.支撑结构与接地结构可拆卸连接,可拆卸的连接结构使得任意结构损坏时,可将该结构拆卸下来进行单独更换,无需整体进行更换,大大节约维修成本。
19.进一步的,所述支撑结构包括第一杆、第二杆和第三杆,所述第三杆的一端与所述第一杆连接,所述第三杆的另一端与所述第二杆连接。
20.进一步的,在所述接地结构上设置减振装置。
21.减振装置的设置便于炉内空间自主导航的无人机平稳的放在地面上,减轻地面对炉内空间自主导航的无人机损坏。
22.进一步的,所述减振装置套设在所述接地结构上。
23.相对于现有技术而言,本发明所述的一种炉内空间自主导航的无人机具有以下有益效果:本发明所述的一种炉内空间自主导航的无人机,在机身主体上设置激光雷达定位装置,使得炉内空间的无人机可以实现自主导航、自主定位飞行;激光雷达定位装置设置在机身主体的上方,可以在最大程度上发挥激光雷达作用,降低其他装置激光遮挡角度的影响,从而使得收集到较大的数据范围信息,进而提高无人机的定位精度;在螺旋桨装置上设置防护结构可以有效避免无人机在巡检过程中与障碍物发生碰撞。
附图说明
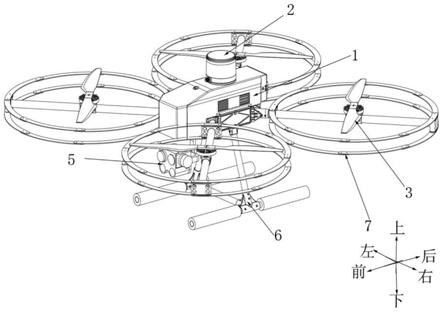
24.图1为本发明实施例所述的一种炉内空间自主导航的无人机立体结构示意图;
25.图2为本发明实施例所述的一种炉内空间自主导航的无人机正视结构示意图;
26.图3为本发明实施例所述的一种炉内空间自主导航的无人机右视结构示意图;
27.图4为本发明实施例所述的一种炉内空间自主导航的无人机俯视结构示意图;
28.图5为本发明实施例所述的一种炉内空间自主导航的无人机立体结构示意图之二;
29.图6为本发明实施例所述的一种炉内空间自主导航的无人机的可伸缩组件的结构示意图;
30.图7为本发明实施例所述的一种炉内空间自主导航的无人机飞行平衡调整装置的俯视结构示意图;
31.图8为本发明实施例所述的一种炉内空间自主导航的无人机飞行平衡调整装置的剖视结构示意图。
32.附图标记说明:
33.1、机身主体;2、激光雷达定位装置;3、螺旋桨装置;4、飞行平衡调整装置;41、中心球;42、平面;43、滑动电阻;431、滑动部;432、静止部;5、摄像装置;6、起落装置;61、支撑结
构;611、第一杆;612、第二杆;613、第三杆;62、接地结构;621、减振装置;7、防护结构;701、防护环;702、连接块;8、可伸缩组件;91、第一辅助定位装置;92、第二辅助定位装置。
具体实施方式
34.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。在本发明的实施例中所提到的“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
35.下面将参考附图并结合实施例来详细说明本发明。
36.实施例1
37.本实施例提出一种炉内空间自主导航的无人机,如图1-8所示,所述炉内空间自主导航的无人机包括设置在中间的机身主体1和设置在四角的螺旋桨装置3,在所述机身主体1上设置激光雷达定位装置2和可伸缩组件8,在所述螺旋桨装置3上设置防护结构7,所述激光雷达定位装置2设置在所述机身主体1的上方。
38.在机身主体1上设置激光雷达定位装置2,使得炉内空间的无人机可以实现自主导航、自主定位飞行;激光雷达定位装置2设置在机身主体1的上方,可以在最大程度上发挥激光雷达作用,降低其他装置激光遮挡角度的影响,从而使得收集到较大的数据范围信息,进而提高无人机的定位精度;在螺旋桨装置3上设置防护结构7可以有效避免无人机在巡检过程中与障碍物发生碰撞,提高作业安全性。
39.在本实施例中,所述激光雷达定位装置2使得炉内空间的无人机可以实现自主导航、自主定位飞行的功能,在所述激光雷达定位装置2的内部的水平面上设置16个激光发射头,每相邻两个激光发射头之间的夹角为30
°
,使得所述激光雷达定位装置2可以在水平面上实现360
°
环扫,收集空间点云信息,可以对作业区域进行全方位扫描,进而提高无人机的定位精度;便于无人机判断周围障碍物与无人机的距离,在接近障碍物时进行避障动作;一些极细或是透明类结构无法通过激光准确发现,如果有遗漏则通过防护结构7进行隔离,保证螺旋桨装置3正常旋转稳定飞行。
40.所述炉内空间自主导航的无人机还包括诸如飞行控制系统、警报系统等设备,鉴于其相关部件的具体结构以及具体的装配关系均为现有技术,在此不进行赘述。
41.具体的,所述激光雷达定位装置2与所述机身主体1刚性连接,所述螺旋桨装置3与所述防护结构7刚性连接。
42.该设置保证炉内空间自主导航的无人机整体结构的完整性,降低多余震动,从而提高控制精度。
43.具体的,如图1-5所示,所述防护结构7安装在螺旋桨装置3的外侧。
44.该设置用于保护螺旋桨在巡检过程中不受外部障碍物碰撞,从而能够提高炉内空间自主导航的无人机飞行的安全性。
45.具体的,如图1-5所示,所述防护结构7包括防护环701和连接块702,所述连接块
702安装在所述防护环701的内侧。
46.该设置提高防护结构7的稳定性,从而进一步提高炉内空间自主导航的无人机飞行的安全性。
47.具体的,如图1-3所示,在所述机身主体1上设置摄像装置5。所述摄像装置5用于进行信息(视频或照片)采集。
48.更具体的,所述摄像装置5设置在所述机身主体1上的位置不做限定。所述摄像装置设置在所述机身主体1的前侧和/或后侧和/或左侧和/或右侧和/或上侧和/或下侧。所述摄像装置可以设置在所述机身主体1上的前侧,所述摄像装置可以设置在所述机身主体1的后侧,所述摄像装置还可以设置在所述机身主体1的上侧等。
49.优选的,在本实施例中,如图2所示,在所述机身主体1的下方靠前的位置设置摄像装置5。
50.该设置用于保护摄像装置5在巡检过程中不受外部障碍物碰撞,从而能够提高炉内空间自主导航的无人机飞行的安全性。
51.具体的,如图4和图5所示,在所述机身主体1上还设置第一辅助定位装置91和第二辅助定位装置92,所述第一辅助定位装置91的激光头朝上设置,所述第一辅助定位装置91设置在所述机身主体1的上方靠后的位置,所述第二辅助定位装置92设置在所述机身主体1的下方靠后的位置,所述第二辅助定位装置92的激光头朝下设置。
52.该设置一方面用于辅助激光雷达定位装置2进行全方面的定位,第一辅助定位装置91的激光头朝上设置,用于收集上方的信息,提高炉内空间的无人机的定位精度;第二辅助定位装置92的激光头朝下设置,用于收集下方的信息,进一步提高炉内空间的无人机的定位精度;第一辅助定位装置91和第二辅助定位装置92均设置在所述机身主体1的靠后的位置,便于平衡设置在靠前的摄像装置5的重量,保持炉内空间自主导航的无人机飞行的平衡性,进一步提高炉内空间自主导航的无人机飞行的安全性。
53.具体的,如图1-5所示,在所述机身主体1的下方设置起落装置6。
54.具体的,如图2和图5所示,所述起落装置6包括支撑结构61和接地结构62,所述支撑结构61与所述接地结构62可拆卸连接。
55.支撑结构61与接地结构62可拆卸连接,可拆卸的连接结构使得任意结构损坏时,可将该结构拆卸下来进行单独更换,无需整体进行更换,大大节约维修成本。
56.具体的,如图2和图5所示,所述支撑结构61包括第一杆611、第二杆612和第三杆613,所述第三杆613的一端与所述第一杆611连接,所述第三杆613的另一端与所述第二杆612连接。
57.具体的,如图1-5所示,在所述接地结构62上设置减振装置621。
58.减振装置621的设置便于炉内空间自主导航的无人机平稳的放在地面上,轻地面对炉内空间自主导航的无人机损坏。
59.具体的,所述减振装置621的具体材料不做限制,所述减振装置621可以设置为海绵,所述减振装置621还可以设置为橡胶。
60.更具体的,如图2和图5所示,所述减振装置621套设在所述接地结构62上。
61.炉内空间自主导航的无人机在巡检过程中有较大概率与障碍物发生碰撞,进而导致无人机失衡不能执行飞行作业,为了解决碰撞后无人机失衡不能执行飞行作业的问题,
具体的,如图4所示,在所述机身主体1上设置可伸缩组件8。所述可伸缩组件8设置在所述激光雷达定位装置2的外圆周上。
62.所述可伸缩组件8设置在所述激光雷达定位装置2的外圆周上,一方面,当检测判断到无人机周围有障碍物时,控制可伸缩组件8伸出可以对激光雷达定位装置2形成保护,避免激光雷达定位装置2与外部的障碍物发生碰撞;另一方面,当炉内空间自主导航的无人机在飞行作业时发生碰撞等情况失衡时,控制飞行平衡调整装置4调整触发可伸缩组件8伸缩的电流大小来调节可伸缩组件8伸出或缩回,来调整无人机的在某个方向上的重量飞行姿态,使得无人机恢复平衡的状态,保障炉内空间自主导航的无人机平衡飞行。
63.所述可伸缩组件8的数量不做限制。
64.在本实施例中,如图4所示,所述可伸缩组件8的数量均设置为四个。
65.如图6所示,所述可伸缩组件8设置为多节,触发各节伸缩的电路相互并联。
66.具体的,如图5所示,在所述机身主体1上设置飞行平衡调整装置4。
67.飞行平衡调整装置4调整触发可伸缩组件8伸缩的电流大小来调节可伸缩组件8伸出或缩回,当检测无人机受到撞击出现不平衡时也可以保障检测无人机平衡飞行。
68.更具体的,如图5所示,在所述机底101的中心位置上设置飞行平衡调整装置4。
69.更具体的,如图7和图8所示,所述飞行平衡调整装置4包括位于机底101的中心位置上的中心球41、承托中心球41的平面42和沿所述中心球41与所述可伸缩组件8对应方向连线设置的滑动电阻43;所述滑动电阻43包括滑动部431和静止部432,在所述静止部432的外侧套设所述滑动部431,滑动部431的外端与中心球41连接;所述滑动电阻43的数量与所述可伸缩组件8的数量相同,所述滑动电阻43与触发所述可伸缩组件8伸缩的电路串联。飞行平衡调整装置4的设置可快速、准确的控制可伸缩组件8电流的大小。
70.当检测炉内空间自主导航的无人机受到撞击出现不平衡时,飞行平衡调整装置4控制中心球41发生倾斜向一侧滑动,推动倾斜一侧的滑动电阻43的滑动部431向静止部432一侧滑动,使电阻变小;另一侧的滑动电阻43的滑动部431向静止部432外侧滑动,使电阻变大;从而通过对应的可伸缩组件8的电流变大和变小,促使倾斜一侧的可伸缩组件8伸长,另一侧的可伸缩组件8缩短来平衡检测无人机的飞行;可知,中心球41滑动后对倾斜方向一侧的多个可伸缩组件8均有不同程度的促发伸长作用,而对倾斜方向另一侧的多个可伸缩组件8均有不同程度的促发缩短作用;从而可以保障检测无人机平衡飞行。
71.当检测炉内空间自主导航的无人机进行飞行作业时,飞行人员通过遥控装置手动操控检测无人机进入作业空间,飞行人员通过遥控装置控制可伸缩组件8缩回,避免可伸缩组件8对激光雷达定位装置2的扫射角度的遮挡,从而使得收集到较大的数据范围信息,进而提高炉内空间自主导航的无人机的定位精度;当检测到无人机周围有不可避免的障碍物时,控制可伸缩组件8伸出可以对激光雷达定位装置2形成保护,避免激光雷达定位装置2与外部的障碍物发生碰撞;发生碰撞失衡后,飞行人员通过遥控装置控制飞行平衡调整装置4,进而来控制可伸缩组件8的伸出或缩回,从而调整好检测无人机姿态后可以继续执行巡视任务。
72.相对于现有技术而言,本发明所述的一种炉内空间自主导航的无人机具有以下有益效果:本发明所述的一种炉内空间自主导航的无人机,在机身主体上设置激光雷达定位装置,使得炉内空间的无人机可以实现自主导航、自主定位飞行;激光雷达定位装置设置在
机身主体的上方,可以在最大程度上发挥激光雷达作用,降低激光遮挡角度,从而使得收集到较大的数据范围信息,进而提高无人机的定位精度;在螺旋桨装置上设置防护结构可以有效避免无人机在巡检过程中与障碍物发生碰撞。
73.实施例2
74.本实施例提出一种炉内空间自主导航的无人机的控制方法,所述检测无人机的控制方法使用如实施例1所述的一种炉内空间自主导航的无人机,所述一种炉内空间自主导航的无人机的控制方法具体包括以下步骤:
75.s101、检测所述的炉内空间自主导航的无人机的状态;
76.s102、判断炉内空间自主导航的无人机的状态是否处于飞行作业,若是,则进入s103;若否,则进入s113;
77.s103、控制可伸缩组件8缩回;
78.在步骤103中,当炉内空间自主导航的无人机进行飞行作业时,控制可伸缩组件8缩回,避免可伸缩组件8对激光雷达定位装置2的扫射角度的遮挡,从而使得收集到较大的数据范围信息,进而提高炉内空间自主导航的无人机的定位精度。
79.s104、判断炉内空间自主导航的无人机周围是否有不可避免的障碍物,若是,则进入s105;若否,则进入s106;
80.s105、控制可伸缩组件8伸出;
81.检测到无人机周围有不可避免的障碍物时,控制可伸缩组件8伸出可以对激光雷达定位装置2形成保护,避免激光雷达定位装置2与外部的障碍物发生碰撞。
82.s106、保持原状;
83.s107、判断炉内空间自主导航的无人机在飞行作业时是否失衡,若是,则进入s108;若否,则进入s109;
84.s108、控制飞行平衡调整装置4调整触发可伸缩组件8伸缩的电流大小来调节可伸缩组件8伸出或缩回;
85.在步骤s108中,当炉内空间自主导航的无人机在飞行作业时发生碰撞等情况失衡时,控制飞行平衡调整装置4调整触发可伸缩组件8伸缩的电流大小来调节可伸缩组件8伸出或缩回,调整无人机的飞行姿态,使得无人机恢复平衡的状态,保障炉内空间自主导航的无人机平衡飞行。
86.s109、保持原状;
87.s110、1min后判断炉内空间自主导航的无人机在飞行作业时是否失衡,若是,则进入s111;若否,则进入s112;
88.s111、继续进行飞行检测任务;
89.在步骤s111中,在1min后检测炉内空间自主导航的无人机在飞行作业保持平衡时,继续进行飞行检测任务。
90.s112、发出警报;
91.在步骤s112中,在1min后检测炉内空间自主导航的无人机在飞行作业仍然失衡时,发出警报,提醒工作人员停止进行飞行检测任务。
92.s113、控制可伸缩组件8伸出。
93.在步骤s113中,当炉内空间自主导航的无人机不进行飞行作业时,控制可伸缩组
件8伸出,更好地防护激光雷达定位装置2。
94.本发明所述的一种炉内空间自主导航的无人机的控制方法,通过步骤s101-s113,把激光雷达定位装置2、可伸缩组件8和飞行平衡调整装置4关联起来,通过步骤s102对无人机的状态进行判定,便于检测无人机的控制系统控制可伸缩组件8伸出或缩回,在步骤103中,当检测无人机进行飞行作业时,控制可伸缩组件8缩回,避免可伸缩组件8对激光雷达定位装置2的扫射角度的遮挡,从而使得收集到较大的数据范围信息,进而提高炉内空间自主导航的无人机的定位精度;在步骤s113中,当炉内空间自主导航的无人机不进行飞行作业时,控制可伸缩组件8伸出,更好地防护激光雷达定位装置2;通过步骤s104对炉内空间自主导航的无人机周围是否有不可避免的障碍物进行判断,在步骤105中,当检测到无人机周围有不可避免的障碍物时,控制可伸缩组件8伸出可以对激光雷达定位装置2形成保护,避免激光雷达定位装置2与外部的障碍物发生碰撞;通过步骤s107对无人机在飞行作业时是否失衡进行判定,在步骤s108中,当炉内空间自主导航的无人机在飞行作业时发生碰撞等情况失衡时,控制飞行平衡调整装置4调整触发可伸缩组件8伸缩的电流大小来调节可伸缩组件8伸出或缩回,调整无人机的飞行姿态,使得无人机恢复平衡的状态,保障炉内空间自主导航的无人机平衡飞行;通过步骤s110对1min后无人机在飞行作业时是否失衡进行判定,在步骤s111中,在1min后检测炉内空间自主导航的无人机在飞行作业保持平衡时,继续进行飞行检测任务;在步骤s112中,在1min后检测炉内空间自主导航的无人机在飞行作业仍然失衡时,发出警报,提醒工作人员停止进行飞行检测任务。
95.所述一种炉内空间自主导航的无人机的控制方法与上述一种炉内空间自主导航的无人机相对于现有技术所具有的优势相同,在此不再赘述。
96.虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1