一种基于重心自适应调节装置的直线型无人机结构
1.本发明涉及机械设计和飞行器感知与控制领域,具体地说是一种结合转动装置精准控制无人机载重架自主微调摆动实现重心稳定的直线型无人机。
背景技术:
2.不同于一般多旋翼无人机,直线型无人机旋翼呈直线均匀,旋翼间干扰小,喷雾效果好,在农业植保领域极具应用前景。但目前已公开的直线型无人机整体结构绝对固定,导致在植保作业时,俯仰角改变易引起重心变化,需要借助电机不断调整机身位姿,使电机有用功率降低,造成不必要的能量浪费;同时已公开直线型无人机的竖直姿态调整杆结构对风场利用不充分,姿态调整电机仅能提供航姿变化的推力,无法为药液喷洒提供下洗风场,导致部分作业区域药液效果不均匀,影响整体作业效率。
技术实现要素:
3.发明目的:为了克服上述现有机械结构的不足,本发明公开了一种基于重心自适应调节装置的直线型无人机结构。本发明适用于救援、测量以及植保等多个领域,主要针对农业植保过程中喷雾作业,具有稳定性好、电机效率高的特点。
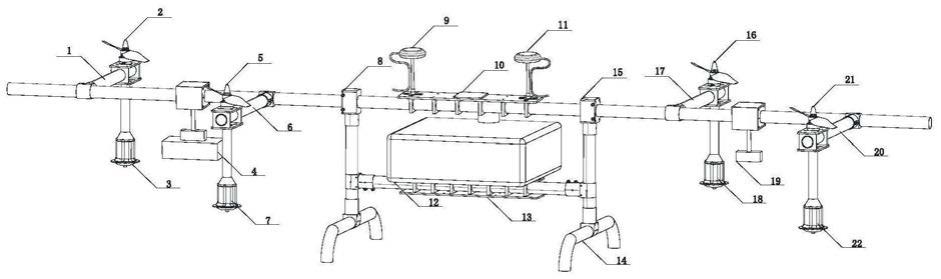
4.本发明的技术方案包括:一种基于重心自适应调节装置的直线型无人机结构,包括第一调整杆1、第一旋翼2、第一作业单元3、毫米波雷达4、第二旋翼5、第二调整杆6、第二作业单元7、第一转动轴承8、第一gps-rtk部件9、飞行控制器10、第二gps-rtk部件11、融合仓12、支撑架13、起落架14、第二转动轴承15、第三旋翼16、第三调整杆17、第三作业单元18、激光19、第四调整杆20、第四旋翼21、第四作业单元22;四部位调整杆中,最外侧的第一调整杆1和第四调整杆20,中段的第二调整杆6和第三调整杆17分别以飞行控制器10为中心对称分布,第一调整杆1和第四调整杆20末端分别连接第一作业单元3、第四作业单元22;第二调整杆6和第三调整杆17末端分别连接第二作业单元7、第三作业单元18;
5.在四个旋翼中,第一调整杆1上的第一旋翼2和第四调整杆20上的第四旋翼21,第二调整杆6上的第二旋翼5和第三调整杆17上的第三旋翼16对称分布在相应调整杆上,为无人机飞行提供主要升力和航姿变换的转动拉力;
6.设置在飞行控制器10两端远处的毫米波雷达4与激光19数据融合,实现无人机在不同地理环境中的定点定高与一键起降功能;设置在飞行控制器10两端近处的第一gps-rtk部件9、第二gps-rtk部件11通过解算地面基站与机载端gps的差分数据,实现厘米级高精度实时定位;飞行控制器10下面是融合仓12,其内部包含电池仓和药箱;
7.飞行控制器10两端与起落架14连接的第一转动轴承8、第二转动轴承15为限位型机械套件,上端与主杆同轴心相连,下端与支撑架13连接,保证主杆能且仅能在限定角度内转动;已公开直线型植保无人机该部位为固定连接,这种无人机在俯仰姿态调整时,需要电机提供额外的升力恢复机身姿态稳定。第一转动轴承8、第二转动轴承15结构结合下方携带的融合仓12自身惯性作用,通过飞行控制器反馈的角度,在电机和齿轮传动的作用下,自主
将俯仰变化引起的无人机重心变化修正,减小飞行控制难度的同时提高第一旋翼2、第二旋翼5、第三旋翼16、第四旋翼21的有用功利用率。
8.进一步,融合仓12为药箱和电池仓的一体化设计,其上端留有药箱倾倒口和电池仓开盖,下端通过螺栓固定于支撑架13上,由于无人机采用大容量的药箱,传统的药箱随着药液喷洒,其中会填充大量空气,药液会在无人机飞行过程中撞击药箱,给重心调增带来困难;为避免这种情况,一体化设计可以有效减少非对称挂载引起的控制困难,同时按压式水箱控制方法避免了水箱中空隙的产生,具有良好的稳定性和可控性。
9.进一步,飞行控制器10控制部分由位置控制器、速度控制器、角度控制器、角速度控制器以及角加速度控制器串级构成;角加速度闭环反馈由机载陀螺仪的三轴角速度送入跟踪微分器进行估算,由比例控制器完成负反馈控制;角速度闭环由机载陀螺仪的三轴角速度低通滤波后反馈,由比例控制器完成负反馈控制;角度闭环由机载加速度计、陀螺仪和磁力计融合的欧拉角反馈,偏航角期望由人机交互端直接给出,横滚角和俯仰角期望是上一级速度控制器的输出,由比例积分控制器完成负反馈控制;速度闭环由机载加速度计、陀螺仪、磁力计和gps模块融合的水平速度矢量反馈,由机载加速度计、陀螺仪、磁力计和毫米波雷达融合的天向速度反馈,由比例微分控制器完成负反馈控制;位置闭环由机载加速度计、陀螺仪、磁力计、毫米波雷达和北斗模块融合的惯性系位置反馈,期望是人机交互或者航线规划,由比例积分控制器完成负反馈控制。
10.进一步,调整杆采用碳纤维材料。
11.进一步,四个旋翼采用大功率电机搭配双叶桨。
12.进一步,第一作业单元3、第二作业单元7、第三作业单元18、第四作业单元22结构相同,这种对称结构易于解耦,每一个作业单元由喷头固定板23、输送立杆24、旋转电机25、离心喷盘26、电机连接件27组成;喷头固定杆23通过管夹、长螺丝、螺母与主杆相连,输送立杆24内部有软管联通主杆中的主药液输送通道,外部使用较厚硅胶材料包裹,避免内部软管受损;输送立杆24和旋转电机25之间通过电机连接件27连接,旋转电机提供药液雾化的离心力,可在高转速下拥有不错的扭矩,离心喷盘26提供加速通道,保证水滴在流经通道时不会溢出,实现有效雾化。
13.进一步,第一转动轴承8与第二转动轴承15的内部均采用紧固件与弹簧柔性限制支撑架13转动角度,主杆通过第一转动轴承8与第二转动轴承15的限位销连接至转动轴承内部滑槽,实现重心柔性自主调整;轴承外部采用透明亚克力作为盖板,能够直观观测轴承内部结构工作是否正常。
14.进一步,第一转动轴承8与第二转动轴承15中,角度显示杆33与传动齿轮29内部通过螺栓连接,用于直观显示无人机重物的旋转角度,初始调整旋钮32和初始调整弹簧34嵌套在一起,共同位于轴承外框30的内部滑槽中;在无人机飞行前,可通过旋转初始调整旋钮32,带动初始调整弹簧34,改变角度显示杆33的位置,重心柔性自主调整下方重物的旋转角度,为防止多次旋转所带来的机械磨损,转动轴承内嵌滚珠28结构,防止传动齿轮29与主杆的直接接触,提高转动轴承的寿命。
15.综上所述,本发明公开了一种功效高、实时性好、性能稳定且重心自适应的直线型无人机。
16.重心自适应直线型无人机,实现飞行器重心的自主调整,提高系统能量的利用率。
结合ukf融合多传感器数据,对飞行器飞行状态实时估计,控制飞行器平稳飞行作业。
17.相比于以往的直线型无人机,本发明方法特有之处在于:
18.(1)重心自调的直线型无人机结构,实现电机有用功充分作用在喷雾作业上,借助可微调角度的转动轴承完成无人机重心自主调整,实现系统的自适应调节。
19.(2)所述的转动轴承机构通过定制的关节电机和齿轮传动,精细化控制下方融合仓的摆动,配合旋翼电机不同转速控制,最大化提升能源利用效率。
20.(3)作业机构采用离心喷头,拥有更好的雾化效果和更广的喷幅,结合飞机特有的下洗气流,可以有效喷灌农作物冠层,提高喷灌效率。
21.(4)调整杆配合旋翼伸出主杆平面,在主杆上呈现交错分布,减小翼间干扰的同时增大电机作用力臂,易于姿态调整,同时提升前后的喷幅面积。
22.(5)融合仓中包含了药箱和电池仓,方便转动轴承进行重心调整,防止不同部件的干扰对飞机整体有大小不一的扰动量。
23.(6)起落架采用3k轻质碳管,加入缓冲起落架。加入缓冲起落架是为了减小融合仓的质量过大对下落时飞行姿态的干扰。
附图说明
24.附图1为本发明整体结构示意图;
25.附图2为本发明调整杆细节图;
26.附图3为本发明转动轴承细节图;
27.附图4为本发明飞行器控制算法框图;
28.图1中,1-第一调整杆、2-第一旋翼、3-第一作业单元、4-毫米波雷达、5-第二旋翼、6-第二调整杆、7-第二作业单元、8-第一转动轴承、9-第一gps-rtk部件、10-飞行控制器、11-第二gps-rtk部件、12-融合仓、13-支撑架、14-起落架、15-第二转动轴承、16-第三旋翼、17-第三调整杆、18-第三作业单元、19-激光、20-第四调整杆、21-第四旋翼、22-第四作业单元;
29.图2中,23-喷头固定板、24-输送立杆、25-旋转电机、26-离心喷盘、27-电机连接件;
30.图3中,28-滚珠、29-传动齿轮、30-轴承外框、31-关节电机、32-初始调整旋钮、33-角度显示杆、34-初始调整弹簧;
具体实施方式
31.下面结合附图和实例对本发明作更进一步的说明。
32.图1所示的基于重心自适应调节装置的直线型无人机结构示意图,主要由以下部分组成:1-第一调整杆、2-第一旋翼、3-第一作业单元、4-毫米波雷达、5-第二旋翼、6-第二调整杆、7-第二作业单元、8-第一转动轴承、9-第一gps-rtk部件、10-飞行控制器、11-第二gps-rtk部件、12-融合仓、13-支撑架、14-起落架、15-第二转动轴承、16-第三旋翼、17-第三调整杆、18-第三作业单元、19-激光、20-第四调整杆、21-第四旋翼、22-第四作业单元。在整个结构中,第一调整杆1、第二调整杆6、第三调整杆17和第四调整杆20上均匀分布第一旋翼2、第二旋翼5、第三旋翼16、第四旋翼21,为无人机飞行提供升力和航姿变换拉力,第一调整
杆1、第二调整杆6、第三调整杆17、第四调整杆20安装角度可根据实际作业效果优化;毫米波雷达4和激光19分布在主杆两端,针对不同地势采集当前高度信息,经飞行控制器10处理后控制无人机定高。
33.图2所示为本发明调整杆细节图。第一调整杆1、第二调整杆6、第三调整杆17、第四调整杆20与主杆通过三通连接件固定,第一调整杆1和第四调整杆20对称安装在主杆两端,第二调整杆6和第三调整杆17对称安装在主杆中部。第一调整杆1、第二调整杆6、第三调整杆17、第四调整杆20对应的旋翼下方均安装一个作业单元。这种对称结构易于解耦,方便数学模型和控制系统的建立。每一个作业单元由喷头固定板23、输送立杆24、旋转电机25、离心喷盘26、电机连接件27组成。喷头固定杆23通过管夹、长螺丝、螺母与主杆相连。输送立杆24内部有软管联通主杆中的主药液输送通道,外部使用较厚硅胶材料包裹,避免内部软管受损。输送立杆24和旋转电机25之间通过电机连接件27连接。旋转电机提供药液雾化的离心力,可在高转速下拥有不错的扭矩。离心喷盘26提供加速通道,保证水滴在流经通道时不会溢出,实现有效雾化。
34.作业机构采用离心喷头,相比于压力喷头,雾滴更加聚拢,相对宽度更低,分布更均匀,植物吸收更快,药剂发挥更好,保证整体结构的一致性与喷雾作业的全覆盖,防止重复性喷洒,提高无人机的作业效率。
35.图3所示为转动轴承示意图。第一转动轴承8与第二转动轴承15对称安装在飞行控制器10两侧。角度显示杆33与传动齿轮29内部通过螺栓连接,用于直观显示无人机重物的旋转角度,初始调整旋钮32和初始调整弹簧34嵌套在一起,共同位于轴承外框30的内部滑槽中,在无人机飞行前,可通过旋转初始调整旋钮32,带动初始调整弹簧34,改变角度显示杆33的位置,重心柔性自主调整下方重物的旋转角度。为防止多次旋转所带来的机械磨损,本发明内嵌滚珠28结构,防止传动齿轮29与主杆的直接接触,提高转动轴承的寿命。在无人机飞行变化姿态(俯仰、横滚、偏航等)时,无人机重心相对于大地坐标系与地面竖直方向会产生夹角,不利于飞行作业和飞行稳定性。轴承外部采用透明亚克力作为盖板,能够直接观测轴承内部结构工作是否正常。
36.第一转动轴承8、第二转动轴承15为在限定角度范围内可自适应转动的定制轴承。首先,本发明中的飞行控制器通过搭载的机载陀螺仪的三轴角速度送入跟踪微分器估算飞机当前基于大地坐标系下的姿态角度,通过重心偏移算法计算出下方重物的倾转角度。接着,无人机控制器根据倾转角度向关节电机31发出指令。关节电机31通过传动齿轮29,转动机载融合仓12等重物,通过惯性作用将重心调整在大地坐标系下的竖直方向上,保证飞行器平稳飞行和作业。
37.图4所示为本发明无人机控制算法框图。本发明采用位置控制器、速度控制器、角度控制器、角速度控制器以及角加速度控制器串级构成。本发明结合ukf融合多传感器数据,对无人机飞行状态实时估计,控制无人机平稳飞行作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1