用于超越装置的自主控制的系统和方法与流程
1.本公开大体上涉及超越(override)装置的自主控制的方法,并且更具体地,涉及能够基于施加的力使自主控制致动器与控制杆物理分离的可复位的易断连杆。
背景技术:
2.控制系统通常由自动化致动器(在自主模式下)或操作员(在手动模式下)指挥。在一些情况下,操作员希望超越自动化致动器,并且因此需要重新获得对控制系统输入的控制的能力。在一些情况下,控制系统包括两种单独的控制,其中一种控制用于人类操作员,而另一种控制用于自主控制系统。
3.在这样的示例中,人类操作员需要具有超越自主控制的能力,并且一旦任何人类交互结束就能够将控制系统返回到自主控制能力将是优选的。
技术实现要素:
4.在一个示例中,描述了一种系统,其包括用于控制装置的操作的控制杆、经由棒耦合到控制杆的第一致动器以及经由该棒将第二致动器耦合到控制杆的可复位的易断连杆。基于由第一致动器施加到棒上的力,可复位的易断连杆使第二致动器与控制杆的耦合能够分离。
5.在另一个示例中,飞机被描述为包括发动机和耦合到发动机的系统。该系统包括用于控制发动机的操作的控制杆、经由棒耦合到控制杆的第一致动器以及经由棒将第二致动器耦合到控制杆的可复位的易断连杆。基于由第一致动器施加到棒上的力,可复位的易断连杆使第二致动器与控制杆的耦合能够分离。在发动机的自主运行模式期间,第二致动器用于控制发动机的控制杆。在发动机的手动操作模式期间,操作员使用第一致动器来控制发动机的控制杆。通过棒接收由第一致动器施加的力使可复位的易断连杆将第二致动器与棒分离而进入手动操作模式。
6.在另一个示例中,描述了一种用于超越装置的自主控制的方法。该方法包括在装置的手动操作模式期间经由第一致动器控制装置的控制杆。第一致动器经由棒耦合到控制杆。该方法还包括在装置的自主操作模式期间经由第二致动器控制装置的控制杆。可复位的易断连杆经由棒将第二致动器耦合到控制杆。该方法还包括通过棒接收经由第一致动器施加的力使可复位的易断连杆将第二致动器与棒分离而进入手动操作模式。
7.已经讨论的特征、功能和优点可以在各种示例中独立实现或者在另一些示例中组合。可以参考以下描述和附图看到示例的更多细节。
附图说明
8.在随附权利要求中阐述了被认为是说明性示例的特征的新颖特征。然而,当结合附图阅读时,通过参考本公开的说明性示例的以下详细描述,将最好地理解说明性示例以及其优选的使用模式、进一步的目标和描述,其中:
9.图1图示了根据示例性实施方式的飞机。
10.图2图示了根据示例性实施方式的系统的示例的框图。
11.图3图示了根据示例性实施方式的系统的示例的侧视图。
12.图4图示了根据示例性实施方式的系统的示例的前视图。
13.图5图示了根据示例性实施方式的系统的另一个示例的前视图。
14.图6示出了根据示例性实施方式的用于超越装置的自主控制的方法200的示例的流程图。
15.图7图示了根据示例性实施方式的计算装置的示例。
具体实施方式
16.现在将在下文中参考附图更全面地描述公开的示例,其中示出了一些但不是全部公开的示例。实际上,描述了几个不同的示例,并且不应将其解释为限于本文中阐述的示例。相反,描述这些示例是为了使本公开彻底和完整,并将向本领域技术人员充分传达本公开的范围。
17.在示例中,描述了一种可机械破坏的控制致动装置和系统。该系统允许将两个分离的控制致动器用于单个受控装置,该受控装置在冗余(主要和次要)备用控制机构的许多场景中都可以被看到。例如,飞机的节气门具有控制棒供飞行员用来控制节气门,并且另一个控制棒由计算机控制以用于自主飞行。在这个示例中,当有两种独立的控制机构时,需要有一种控制超越另一种的能力(例如,飞行员能够在需要时超越计算机控制)。本文中的示例允许能够以各种角度断开(或暂时禁用)一个控制致动器,并且能够轻松地重新连接或重置该控制致动器。
18.现在参考附图,图1图示了根据示例实施方式的飞机100。飞机100包括机头102、机翼104a-b、机身106、尾翼108、发动机110a-b和耦合到发动机110a-b的系统120。在示例中,系统120用于超越对发动机110a-b中的一个或多个的自主控制。尽管图1图示了商用客机的示例,但是其他类型的飞机也与本文描述的示例一起使用。此外,根据飞机的类型,包括更少或更多的发动机。
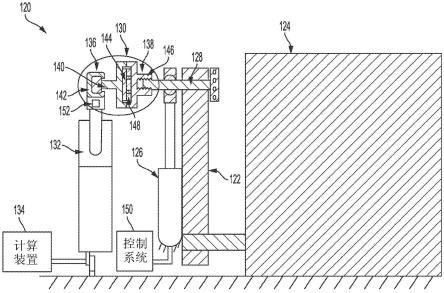
19.图2图示了根据示例实施方式的系统120的示例的框图。系统120包括用于控制装置124的操作的控制杆122、经由棒128耦合到控制杆122的第一致动器126以及经由棒128将第二致动器132耦合到控制杆122的可复位的易断连杆130。基于由第一致动器126施加到棒128的力,可复位的易断连杆130使第二致动器132与控制杆122的耦合能够分离。
20.在一个示例中,控制杆122使用钟形曲柄运动来控制装置124的操作。因此,控制杆122机械地连接到装置124,并且控制杆122的旋转控制装置124的操作。在示例中,装置124包括以这种方式操作的任何类型的机器。
21.在示例应用中,控制杆122可以包括例如飞机100的节气门杆,并且装置124可以是耦合到节气门杆的发动机。在该示例中,第一致动器126或第二致动器132的操作控制发动机的操作。例如,第一致动器126是供飞行员用来控制节气门杆的控制棒,而第二致动器132是由计算装置134控制以用于自主操作的另一控制棒。
22.在另一个示例操作中,控制杆122控制其他飞机飞行控制,举例来说,如俯仰、滚转和偏航。
23.第一致动器126经由棒128永久地附接到控制杆122。第二致动器132经由可复位的易断连杆130可移除地附接到控制杆122。第一致动器126和第二致动器132每个都具有独立控制控制杆122的能力,并且基于由第一致动器126施加到棒128的力,第一致动器126超越第二致动器132。当第一致动器126超越第二致动器132时,第二致动器132与控制杆122断开连接。第一致动器126总是机械连接到控制杆122,并且因此操作员总是有机会接管对装置124的控制。
24.可复位的易断连杆130使得在控制杆122相对于装置124的任何旋转取向下第二致动器132与控制杆122的耦合能够分离。
25.在示例中,在装置124的自主操作模式期间,第二致动器132用于控制装置124的控制杆122,并且在装置124的手动操作模式期间,第一致动器126被操作员用于控制装置124的控制杆122。通过棒128接收由第一致动器126施加的力使可复位的易断连杆130将第二致动器132与棒128分离而进入手动操作模式。
26.通常,第二致动器132根据计算装置134指示的编程操作经由控制杆122的移动来控制装置124的操作。第二致动器132实现对装置124的自主控制。在一些情况下,第二致动器132能够进入故障状态,在这种情况下,操作员能够使用第一致动器126重新获得对装置124的控制。然而,为此,第二致动器132将需要与控制杆122断开连接,以便第二致动器132不再具有控制控制杆122的能力。系统120被配置成使得向第一致动器126施加力导致棒128摆脱第二致动器132。系统120中的断裂点是使第二致动器132与棒128脱离并断开连接的可复位的易断连杆130,其机械地将第二致动器132与控制杆122断开,使得第一致动器126作为连接到控制杆122的唯一致动器用于控制装置124。
27.可以严格控制断裂特性,以防止在正常操作期间错误熔断,并确保在任何控制输入位置在必要时完全熔断。系统120不易出现早期疲劳故障,在熔断时不会干扰其他系统,并且一旦故障已被清除就可复位。
28.系统120允许安全分离故障装置(例如,自主控制的交通工具的发动机或飞行控制致动器)。在示例性使用中,单发动机飞机包括附接到发动机的节气门杆的单根操作员节气门拉线。在自主操作模式期间,节气门致动器用于控制发动机上的节气门杆,从而反向驱动飞机机舱中的节气门拉线和控制杆。在驾驶模式期间,飞行员用机舱中的杆驱动节气门拉线,并且致动器被反向驱动。在节气门致动器卡住或在请求时未释放控制的情况下,飞行员能够通过拉线命令节气门移动,从而脱离节气门致动器。将第二致动器132(例如,自主节气门致动器)附接到发动机安装的节气门杆(例如,控制杆122)的可复位的易断连杆130将允许在任一模式下的安全节气门操作,并且将在自主节气门致动器发生故障并且飞行员必须移动节气门的情况下脱离。当故障已被清除时,可复位的易断连杆130也可被复位。
29.系统120因此为飞机提供两种单独的控制。一种控制是由人类飞行员(例如,第一致动器126)进行的,而另一种控制是自主控制(例如,第二致动器132)。第一致动器126和第二致动器132在自主控制期间协同工作。第一致动器126具有超越自主控制的能力,并且一旦情况已恢复正常就能够返回到自主控制。
30.图3图示了根据示例性实施方式的系统120的示例的侧视图。第一致动器126和第二致动器132以线性运动操作从而引起控制杆122的旋转,如图所示,以用于对装置124的旋转输入。
31.图4图示了根据示例性实施方式的系统120的示例的前视图。图4图示了可复位的易断连杆130和棒128的更多细节。在示例中,可复位的易断连杆130包括磁性或机械易断的控制棒连杆。
32.在图4中,可复位的易断连杆130包括具有第一半部136和第二半部138的磁性耦合器以经由棒128将第二致动器132耦合到控制杆122。第一半部136包括用于与第二致动器132的配件142配合的基座140。基座140可以包括球型快速附接配件,并且配件142可以包括球型快速附接配件插入其中的承窝。第一半部136还包括定位在基座140中的磁体144。第二半部138包括附接到棒128的支架146和定位在支架146中的磁极片148。磁体144磁性连接到磁极片148。支架146包括用于附接到棒128上的相应螺纹的螺纹部分,并且磁极片148使用例如螺钉附接件连接到支架146。
33.在操作中,当第一致动器126和第二致动器132都拉动控制杆122时,可复位的易断连杆130将在诱发的弯曲载荷下断裂。例如,磁体144和磁极片148之间的磁力将被诱发的弯曲载荷克服。第二致动器132然后与控制杆122断开连接,并且使用第一致动器126操作装置124。
34.基座140被示为椭圆形,以能够根据任何角度以不同的力(或力的大小)断裂。在更高的角度(例如,当配件142相对于基座140倾斜时),断裂力可以更低。控制杆122移动通过具有大旋转角度(例如,90度或更大)的弧,并且因此可复位的易断连杆130允许第二致动器132在任何取向和同样大小的施加的力时断裂。
35.在另一些示例中,基座140包括足迹形状,使得断裂力随输出轴角度而变化并且产生垂直于控制杆122作用的恒定力,因此,无论轴角度位置如何,都有助于确保恒定的输出轴扭矩。例如,对于圆形的基座140,用于断裂的易断力总是相同的。
36.可复位的易断连杆130不需要与棒128成一直线(轴向或在一平面中)。这允许安装硬件的多种选择,并且可以通过为球窝型构造的基座140来实现,在该构造中,基座140是圆形的并且配件142配合表面是匹配的圆孔。使用磁体144进行连接允许可复位的易断连杆130的轻松断开连接和快速复位。磁体144和基座140的轮廓还允许精确控制断点载荷。基座140的形状也可以从圆形改变以调整断点载荷。
37.因此,系统120是可重置的并且被配置为在规定的施加力内断裂。断裂力是可预测的和一致的。断裂力也是突然的,从而没有达到中间的断裂位置。因此,第一致动器126或第二致动器132控制该控制杆122。没有第一致动器126和第二致动器132两者都控制控制杆122的情形。一旦实现了断裂力,第二致动器132就突然断开连接。
38.磁体144使可复位的易断连杆130能够以相同的扭矩一致地断裂,并且可以通过将磁体144与磁极片148重新对准而被容易地复位。
39.在一些示例中,磁体144是永磁体。
40.在一些示例中,磁体是电磁体,并且系统120进一步包括耦合到电磁体的控制系统150,用于控制电磁体的磁吸引力。在图4中,控制系统150被示为耦合到第一致动器126的基座,并且耦合到磁体144和/或磁极片148的接线在第一致动器126的内部。第一致动器126总是连接到棒128,并且因此磁体144和控制系统150之间的电连接始终在适当位置。
41.控制系统150包括处理器、存储器以及存储在存储器上可由处理器执行以执行功能的指令。例如,控制系统150可以被编程以基于装置124的操作条件改变电磁体的磁吸引
力。控制系统150可以改变磁力以使需要的分离或断裂力变化。在装置124是飞机上的发动机的情形中,在着陆进场期间,湍流可以很高,并且因此,在这种情形中,控制系统150将磁力改变为更强,以防止由湍流引起的不希望的断裂。因此,飞行阶段可用作控制系统150通过增加、减少或以其他方式改变提供给电磁体的功率量来改变磁体144的磁力的基础。
42.在另一个示例中,控制系统150基于装置124运行的天气条件来改变电磁体的磁力。控制系统150也可以被编程以基于本文描述的因素的任何组合来改变电磁体的磁力。
43.在另一个示例中,控制系统150改变电磁体的磁力以定制所需的位置性成角度的断裂力。在该示例中,包括传感器152以用于检测可复位的易断连杆130相对于第二致动器132的角度,并且控制系统150基于该角度改变磁吸引力。控制系统150和电磁体因此可以产生关于角度的如由位置传感器感测的定制断裂力,位置传感器在反馈回路中向控制系统150输出信号以在位置和时间方面控制力。
44.图5图示了根据示例性实施方式的系统120的另一个示例的前视图。在图5中,可复位的易断连杆130具有机械易断控制棒154以经由棒128将第二致动器132耦合到控制杆122。第一半部136仍然包括用于与第二致动器132的配件142配合的基座140,并且第二半部138包括附接到棒128的支架146。机械易断控制棒154将第一半部136连接到第二半部138。
45.机械易断控制棒154具有第一端156和第二端158,并且第一端156和第二端158中的每一个都带有螺纹,使得第一端156附接到基座140并且第二端158附接到支架146。
46.在操作中,当第一致动器126向棒128施加力时,基于该力高于阈值量,机械易断控制棒154将断裂,并且第二致动器132然后将与控制杆122断开连接。
47.在一个示例中,机械易断控制棒154是拉伸元件。机械易断控制棒154具有预定的预载荷并且将在一定的施加压力下断裂。为了使可复位的易断连杆130复位,从两侧(例如,从基座140和从支架146)拧下机械易断控制棒的断裂碎片,并插入新的拉伸元件。
48.图6示出了根据示例性实施方式的用于超越装置124的自主控制的方法200的示例的流程图。例如,图6中所示的方法200呈现了可与图1中所示的飞机100、与图2-5中所示的系统120或与图7中所示的计算装置134一起使用的方法的示例。此外,装置或系统被使用或配置为执行图6中呈现的逻辑功能。在一些情况下,装置和/或系统的部件被配置为执行功能,使得部件被实际配置和结构化(通过硬件和/或软件)以实现此类性能。在另一些示例中,装置和/或系统的部件被布置成适于、能够或适合于执行功能,例如当以特定方式操作时。方法200包括如框202-206中的一个或多个所示的一个或多个操作、功能或动作。尽管以连续顺序示出了这些框,但是这些框也可以并行执行,和/或以与本文描述的那些不同的顺序执行。而且,各种框可以组合成更少的框、划分成额外的框和/或基于期望的实施方式被去除。
49.应当理解,对于本文公开的这个和其他过程和方法,流程图示出了本示例的一种可能的实施方式的功能和操作。就这一点而言,每个框或每个框的多个部分可以代表一个程序代码模块、一个程序代码段或程序代码的一部分,其包括一个或多个可由处理器执行的指令,用于实现过程中的特定逻辑功能或步骤。程序代码被存储在任何类型的计算机可读介质或数据存储装置上,例如,诸如包括磁盘或硬盘驱动器的存储装置。此外,程序代码可以以机器可读格式在计算机可读存储介质上或在其他非暂时性介质或制品上被编码。计算机可读介质可以包括非暂时性计算机可读介质或存储器,例如,诸如寄存器存储器、处理
器高速缓存和随机存取存储器(ram)之类的短时间存储数据的计算机可读介质。计算机可读介质还可包括非暂时性介质,例如二级或持久性长期存储装置,例如,诸如只读存储器(rom)、光盘或磁盘、光盘只读存储器(cd-rom)。计算机可读介质也可以是任何其他易失性或非易失性存储系统。例如,计算机可读介质可以被认为是有形的计算机可读存储介质。
50.此外,图6中的每个框或每个框的多个部分以及在本文公开的其他过程和方法中可以表示被接线以执行过程中的特定逻辑功能的电路。替代实施方式包括在本公开的示例的范围内,其中功能可以按照与所示或讨论的顺序不同的顺序(包括基本上并发或以相反的顺序,这取决于所涉及的功能)执行,如本领域那些讲道理的技术人员将理解的。
51.在框202,方法200包括在装置124的手动操作模式期间经由第一致动器126控制装置124的控制杆122,并且第一致动器126经由棒128耦合到控制杆122。
52.在框204,方法200包括在装置124的自主操作模式期间经由第二致动器132控制装置124的控制杆122,并且可复位的易断连杆130经由棒128将第二致动器132耦合到控制杆122。
53.在框206,方法200包括通过棒128接收由第一致动器126施加的力使可复位的易断连杆130将第二致动器132与棒128分离而进入手动操作模式。
54.在一个示例中,可复位的易断连杆130包括具有第一半部136和第二半部138的磁性耦合器以经由棒128将第二致动器132耦合到控制杆122,并且方法200还包括使磁性耦合器的第一半部136和第二半部138重新对准,从而导致第一半部136和第二半部138的磁性附接,以便将第二致动器132重新附接到棒128以重新进入装置124的自主操作模式。在一个示例中,重新对准是通过手动附接进行的。在另一个示例中,重新对准通过磁体144与磁极片148的磁性重新附接而发生。
55.在图2-5中,系统120被示为包括计算装置134。在示例中,控制系统150也采用计算装置的形式。图7图示了根据示例实施方式的计算装置134的示例。
56.为了执行所描述的功能,计算装置134包括一个或多个处理器160、存储在非暂时性计算机可读介质164上的指令162、通信接口166、输出接口168,并且计算装置134的每个部件连接到通信总线170。计算装置134还包括硬件以实现计算装置134内以及计算装置134与其他装置(未示出)之间的通信。例如,硬件可以包括发射器、接收器和天线。
57.在示例中,通信接口166是无线接口和/或允许到一个或多个网络或到一个或多个远程装置的短距离通信和长距离通信的一个或多个有线接口。这种无线接口提供在一种或多种无线通信协议、蓝牙、wifi(例如,电气和电子工程师协会(ieee)802.11协议)、长期演进(lte)、蜂窝通信、近场通信(nfc)和/或其他无线通信协议下进行通信。此类有线接口包括以太网接口、通用串行总线(usb)接口或经由电线、双绞线、同轴电缆、光链路、光纤链路或其他物理连接与有线网络进行通信的类似接口。因此,在示例中,通信接口166被配置为从一个或多个装置接收输入数据,并且还被配置为向其他装置发送输出数据。
58.非暂时性计算机可读介质164包括或采取存储器的形式,诸如可由一个或多个处理器160读取或访问的一个或多个计算机可读存储介质。计算机可读存储介质可包括易失性和/或非易失性存储部件,例如光学、磁性、有机或其他存储器或盘贮存器,其可以整体或部分地与一个或多个处理器160集成。非暂时性计算机可读介质164被认为是非暂时性计算机可读介质。在一些示例中,非暂时性计算机可读介质164可以使用单个物理装置(例如,一
个光学、磁性、有机或其他存储器或盘存储单元)来实现,而在另一些示例中,非暂时性计算机可读介质164可以使用两个或多个物理装置来实现。
59.非暂时性计算机可读介质164因此是计算机可读介质,并且指令162存储在其上。指令162包括计算机可执行代码。
60.在示例中,一个或多个处理器160是通用处理器或专用处理器(例如,数字信号处理器、专用集成电路等)。一个或多个处理器160接收来自通信接口166的输入以及来自其他传感器(例如,传感器152)的输出,并且处理它们以生成存储在非暂时性计算机可读介质164中的输出。一个或多个处理器160可以被配置为执行存储在非暂时性计算机可读介质164中并且可执行以提供本文描述的计算装置134的功能的指令162(例如,计算机可读程序指令)。
61.输出接口168输出用于报告或存储的信息,并且因此输出接口168类似于通信接口166,而且也可以是无线接口(例如,发射器)或有线接口。
62.注意,尽管本公开描述了在飞机上使用的方法和系统的使用,但相同的功能同样适用于在任何类型的交通工具上使用这些方法和系统,以便从自主操作模式变为手动操作模式。这些方法和系统还可以在非交通工具或静止区域内使用以改变任何类型机器的操作。
63.本文使用的术语“基本上”和“大约”是指不需要精确地实现所述特征、参数或值,而是指偏差或变化(包括例如容差、测量误差、测量精度限制和本领域技术人员已知的其他因素)可以以不排除该特性旨在提供的效果的量出现。
64.本文公开的(一种或多种)系统、(一种或多种)装置和(一种或多种)方法的不同示例包括各种组件、特征和功能。应当理解,本文公开的(一种或多种)系统、(一种或多种)装置和(一种或多种)方法的各种示例包括所述(一种或多种)系统、所述(一种或多种)装置和所述(一种或多种)方法的任何其他示例的以任何组合或任何子组合的方式相结合的任何组件、特征和功能,并且所有这些可能性都意图落在本公开的范围内。
65.此外,本公开包括根据以下条款所述的示例:
66.条款1.一种系统(120),包括:
67.控制杆(122),其用于控制装置(124)的操作;
68.第一致动器(126),其经由棒(128)耦合到所述控制杆(122);和
69.可复位的易断连杆(130),其经由所述棒(128)将第二致动器(132)耦合到所述控制杆(122),其中基于由所述第一致动器(126)施加到所述棒(128)的力,所述可复位的易断连杆(130)使所述第二致动器(132)与所述控制杆(122)的耦合能够分离。
70.条款2.根据条款1所述的系统,其中所述控制杆(122)使用钟形曲柄运动来控制所述装置(124)的操作。
71.条款3.根据条款1或2所述的系统,其中所述控制杆(122)是节气门杆,并且所述装置(124)是耦合到所述节气门杆的发动机(110a-b),其中所述第一致动器(126)或所述第二致动器(132)的操作控制所述发动机的操作。
72.条款4.根据条款1-3中任一项所述的系统,其中在所述装置(124)的自主操作模式期间,所述第二致动器(132)用于控制所述装置(124)的所述控制杆(122),并且其中在所述装置(124)的手动操作模式期间,所述第一致动器(126)由操作员使用以控制所述装置
(124)的所述控制杆(122),并且
73.其中通过所述棒(128)接收由所述第一致动器(126)施加的力使所述可复位的易断连杆(130)将所述第二致动器(132)与所述棒(128)分离而进入所述手动操作模式。
74.条款5.根据条款1-4中任一项所述的系统,其中所述可复位的易断连杆(130)使得在所述控制杆(122)相对于所述装置(124)的任何旋转取向下所述第二致动器(132)与所述控制杆(122)的耦合能够分离。
75.条款6.根据条款1-5中任一项所述的系统,其中所述控制杆(122)是用于飞机(100)的节气门杆,所述第一致动器(126)是供飞行员用来控制所述节气门杆的控制棒(128),并且所述第二致动器(132)是由计算装置(134)控制以进行自主操作的另一个控制棒(128)。
76.条款7.根据条款1-6中任一项所述的系统,其中所述第一致动器(126)经由所述棒(128)永久地附接到所述控制杆(122)。
77.条款8.根据条款1-7中任一项所述的系统,其中所述第一致动器(126)和所述第二致动器(132)各自具有独立控制所述控制杆(122)的能力,其中,基于由所述第一致动器(126)施加到所述棒(128)的力,所述第一致动器(126)超越所述第二致动器(132)。
78.条款9.根据条款1-8中任一项所述的系统,其中所述可复位的易断连杆(130)包括机械易断控制棒(128)以经由所述棒(128)将所述第二致动器(132)耦合到所述控制杆(122)。
79.条款10.根据条款1-9中任一项所述的系统,其中所述可复位的易断连杆(130)包括:
80.基座(142),其用于与所述第二致动器(132)的配件配合;
81.支架(146),其附接到所述棒(128);和
82.机械易断控制棒(154),其具有第一端(156)和第二端(158),并且所述第一端和所述第二端中的每一个都带有螺纹,使得所述第一端附接到所述基座并且所述第二端附接到所述支架。
83.条款11.根据权利要求1-10中任一项所述的系统,其中所述可复位的易断连杆(130)包括具有第一半部和第二半部的磁性(144)耦合器,以经由所述棒(128)将所述第二致动器(132)耦合到所述控制杆(122)。
84.条款12.根据条款1-10中任一项所述的系统,其中所述可复位的易断连杆(130)包括:
85.基座(142),其用于与所述第二致动器(132)的配件配合;
86.磁体(144),其定位在所述基座中;
87.支架(146),其附接到所述棒(128);和
88.磁极片(148),其定位在所述支架中,其中所述磁体被磁性连接到所述磁极片。
89.条款13.根据条款12所述的系统,其中所述支架包括用于附接到所述棒(128)上的相应螺纹的螺纹部分。
90.条款14.根据条款11所述的系统,其中所述磁体是永磁体。
91.条款15.根据条款1-10中任一项所述的系统,其中所述可复位的易断连杆(130)包括电磁体,并且所述系统进一步包括:
92.控制系统(150),其耦合到所述电磁体,用于控制所述电磁体的磁吸引力。
93.条款16.根据条款15所述的系统,其中所述控制系统(150)基于所述装置(124)的操作条件改变所述磁吸引力。
94.条款17.根据条款15所述的系统,进一步包括传感器(152),其用于检测所述可复位的易断连杆(130)相对于所述第二致动器(132)的角度,并且其中所述控制系统基于所述角度改变所述磁吸引力。
95.条款18.一种飞机(100),包括:
96.发动机(110a-b);
97.耦合到所述发动机的系统(120),所述系统包括:
98.控制杆(122),其用于控制所述发动机的操作;
99.经由棒(128)耦合到所述控制杆(122)的第一致动器(126);和
100.可复位的易断连杆(130),其经由所述棒(128)将第二致动器(132)耦合到所述控制杆(122),其中基于由所述第一致动器(126)施加到所述棒(128)的力,所述可复位的易断连杆(130)使所述第二致动器(132)与所述控制杆(122)的耦合能够分离,
101.其中在所述发动机的自主运行模式期间,所述第二致动器(132)用于控制所述发动机的所述控制杆(122),
102.其中在所述发动机的手动操作模式期间,所述第一致动器(126)被操作员用来控制所述发动机的所述控制杆(122),并且
103.其中通过所述棒(128)接收由所述第一致动器(126)施加的力使所述可复位的易断连杆(130)将所述第二致动器(132)与所述棒(128)分离而进入所述手动操作模式。
104.条款19.一种用于超越装置(124)的自主控制的方法(200),所述方法包括:
105.在装置(124)的手动操作模式期间经由第一致动器(126)控制(202)所述装置(124)的控制杆(122),其中所述第一致动器(126)经由棒(128)耦合到所述控制杆(122);
106.在所述装置(124)的自主操作模式期间经由第二致动器(132)控制(204)所述装置(124)的所述控制杆(122),其中可复位的易断连杆(130)经由所述棒(128)将所述第二致动器(132)耦合到所述控制杆(122);以及
107.通过所述棒(128)接收经由所述第一致动器(126)施加的力使所述可复位的易断连杆(130)将所述第二致动器(132)与所述棒(128)分离而进入(206)所述手动操作模式。
108.条款20.根据条款19所述的方法,其中所述可复位的易断连杆(130)包括具有第一半部和第二半部的磁性耦合器,以经由所述棒(128)将所述第二致动器(132)耦合到所述控制杆(122),所述方法进一步包括:
109.使所述磁性耦合器的所述第一半部和所述第二半部重新对准,从而导致所述第一半部和所述第二半部的磁性附接,以便将所述第二致动器(132)重新附接到所述棒(128)以重新进入所述装置(124)的所述自主操作模式。
110.已经出于说明和描述的目的呈现了对不同有利布置的描述,并且该描述不旨在穷举或限制所公开形式的示例。许多修改和变化对于本领域普通技术人员来说将是显而易见的。此外,与其他有利示例相比,不同的有利示例描述了不同的优点。选择和描述所选定的一个或多个示例是为了最好地解释示例的原理、实际应用,并使本领域的其他普通技术人员能够理解具有适合于考虑到的特定用途的各种修改的各种示例的公开内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1