一种轻简化对接锁紧释放装置及其工作方法与流程
1.本发明属于锁紧释放装置技术领域,尤其是涉及一种轻简化对接锁紧释放装置及其工作方法。
背景技术:
2.随着人类对于清洁能源需求的急剧加剧,大型空间太阳能电站的建设越来越迫切,而其中模块化桁架对接是大型空间太阳能电站建设的重要环节。根据模块化桁架机构的构型特点,需要一种可多点分布式独立作动的对接锁紧释放装置。现有的面向大型舱段对接的锁紧释放装置具有体积和质量大、结构复杂的特点,不适合于桁架对接。面向模块化卫星的对接锁紧释放装置在对接轴向占用尺寸比较大,无法满足桁架紧凑的对接要求。为满足桁架对接对于锁紧释放装置小型化、结构简单化、轻量化且可放置于桁架结构管中的要求,本专利提出一种轻简化对接锁紧释放装置构型,为太阳能电站模块化桁架的快速可靠对接提供参考。
技术实现要素:
3.有鉴于此,本发明旨在提出一种轻简化对接锁紧释放装置及其工作方法,结构紧凑、空间占用率低、可多次重复使用、锁紧牢靠的特点,可应用于多种对接分离场合。
4.为达到上述目的,本发明的技术方案是这样实现的:
5.一种轻简化对接锁紧释放装置,包括安装在对接飞行器上的被动端和安装在主动飞行器上的主动端,所述的主动端包括丝杆捕获机构、丝杆壳体、捕获到位触发机构、传动壳体、锁紧到位触发机构和解锁到位触发机构,所述的丝杆壳体、传动壳体与开关架从前到后依次固定连接为一体结构,所述的丝杆捕获机构置于丝杆壳体与传动壳体内部,所述捕获到位触发机构穿设在丝杆壳体和传动壳体的外部,且在弹簧弹力作用下保持平衡,所述锁紧到位触发机构与解锁到位触发机构均与开关架固连;
6.机械臂带动主动端靠近被动端,丝杆捕获机构初步捕获被动端,待被动端触发捕获到位机构时,动力机构驱动丝杆捕获机构的丝杆移动,带动被动端完全被捕获,丝杆持续移动,直至丝杆捕获机构触发锁紧到位触发机构时完成主动端和被动端的锁紧;动力机构驱动丝杆捕获机构的丝杆反方向移动时,丝杆捕获机构逐渐释放被动端,待丝杆捕获机构触发解锁到位触发机构时完成主动端和被动端的释放。
7.进一步的,所述被动端包括被动端盖、中心对称分布的四组碟簧、被动端锁头和四个锁紧螺栓,所述被动端锁头穿过被动端盖的中心设置,四个所述锁紧螺栓依次分别穿过被动端锁头上对应开设的通孔和对应的碟簧后与被动端盖固连。
8.进一步的,所述丝杆捕获机构还包括触发片、丝母、滚针轴承、两个直线轴承、两个扭簧和两个捕获爪,所述丝杆前端加工有与所述丝杆壳体内部尺寸配合的限制转动的方头槽,两个所述捕获爪对称布置,且分别与所述丝杆前端铰接,每个所述扭簧的一端嵌入相应捕获爪卡槽中,另一端卡在所述丝杆内壁上,所述扭簧使相应的捕获爪伸出所述丝杆壳体
时逐渐张开,所述丝母与丝杆配合,且置于所述传动壳体内部,所述触发片与所述丝杆的后端固连,所述丝母与传动齿轮固定连接;
9.所述动力机构包括固定在传动壳体与开关架之间的电机架、安装在电机架上的电机、安装在电机上的主动齿轮和与主动齿轮啮合的传动齿轮,电机驱动所述传动齿轮带动所述丝母旋转,所述丝母与所述丝杆间通过螺纹配合,继而所述丝母旋转位移转化为所述丝杆的直线位移。
10.进一步的,所述捕获到位触发机构还包括触发杆、触发环和捕获开关,所述捕获开关固定在所述丝杆壳体上,所述触发杆依次穿过所述丝杆壳体与电机架外部的限位孔座,所述触发环穿过所述触发杆并通过顶丝固接,所述弹簧套设在所述触发杆上,且置于所述触发环与所述电机架之间,自然状态下弹簧处于压缩状态带动所述触发环与所述捕获开关接触,当被动端捕获成功时,所述被动端推动所述触发杆带动所述触发环离开所述捕获开关,传递捕获到位信号,所述主动端完全捕获被动端。
11.进一步的,所述锁紧到位触发机构包括横向锁紧杆、纵向锁紧杆、锁紧架和锁紧开关,所述锁紧架与所述开关架固连,横向锁紧杆通过铰接在所述锁紧架上,所述纵向锁紧杆穿过锁紧架通孔与所述横向锁紧杆固定连接,所述锁紧开关与所述开关架固连,随着丝杆带动所述触发片移动时与所述纵向锁紧杆接触,带动所述横向锁紧杆沿铰接点转动,进而触发所述锁紧开关,传递锁紧到位信号;主动端和被动端完全锁紧。
12.进一步的,所述解锁到位触发机构包括横向解锁杆、纵向解锁杆、触发轴、解锁架、解锁片和解锁开关,所述解锁架与所述开关架固连,所述纵向解锁杆穿过所述解锁架通孔与横向解锁杆一端通过螺纹连接,所述触发轴一端与所述解锁片固连另一端穿过所述解锁架通孔与横向解锁杆另一端固连,所述解锁开关与所述开关架固连,随着丝杆带动所述触发片移动时与所述解锁片接触即可带动所述横向解锁杆移动,进而触发所述解锁开关,传递解锁到位信号;主动端和被动端完全解锁。
13.进一步的,所述被动端锁头为t字型结构,被动端锁头的与两捕获爪配合处设有限位凸台。
14.进一步的,所述捕获爪为l型结构,且捕获爪的长段与丝杆前端的方头槽铰接,捕获爪的短段上开设有凹槽,两个凹槽相对布置,两捕获爪转动围合捕获被动端锁头的限位凸台处。
15.进一步的,在丝杆上丝母的两侧各套设一个直线轴承,在丝母与其中一个滚针轴承之间设有一个滚针轴承。
16.一种轻简化对接锁紧释放装置的工作方法,具体包括以下步骤:
17.对接过程:机械臂带动所述主动端靠近被动端,当被动端与触发杆接触时,推动所述触发杆带动所述触发环启动所述捕获开关,所述捕获开关传递捕获到位信号,随后电机驱动所述传动齿轮带动所述丝母旋转,所述丝母与丝杆间通过螺纹配合,继而丝母旋转位移转化为丝杆的直线位移;所述丝杆运动带动捕获爪逐渐收回丝杆壳体内,两捕获爪间夹角逐渐减小,最终两个捕获爪完全围合被动端锁头,所述被动端被成功捕获;
18.锁紧过程:所述丝杆持续向同一方向移动,同时被动端随之移动,直至与丝杆固连的触发片与横向锁紧杆接触,使得所述横向解锁杆旋转从而带动纵向解锁杆触发锁紧开关,所述锁紧开关传递锁紧完成信号,电机停止转动,丝杆停止移动,与此同时弹簧持续被
压缩储能;
19.释放过程:电机反方向转动驱动丝杆向反方向移动,所述捕获爪伸出壳体,在扭簧作用下两和捕获爪逐渐张开脱离所述被动端锁头卡槽,同时所述弹簧解除压缩状态,辅助丝杆推动所述被动端与主动端解锁,所述丝杆持续向反方向移动,所述触发片与解锁片接触,进而带动纵向解锁杆反方向移动,直至触发解锁开关,所述解锁开关传递解锁完成信号,电机停止转动,所述丝杆停止移动。
20.相对于现有技术,本发明所述的一种轻简化对接锁紧释放装置及其工作方法具有以下优势:
21.1、本装置结构紧凑,空间占用率低,采用电机制动,作业迅速,可实现主动端与被动端快速捕获对接锁紧与释放。
22.2、在捕获方式上,本发明采用捕获爪与被动端锁头配合捕获,捕获爪容差能力大,可精准捕获被动端锁头,被动端锁头捕获处加工为圆弧形,捕获过程可自行调姿对正。
23.3、本装置采用自锁丝杠螺母的作动方式,不仅可以提供足够的锁紧力,而且可以保证在轨长时间的可靠加载,不会出现误解锁的情况。
24.4、本锁紧释放装置采用压缩碟簧弹性加载的方式,可使得锁紧力可靠施加,并可保证在机动过载、高低温工况下的自动力载补偿,避免了刚性加载机构力损失而导致加载失败的情况发生。
25.5、本装置的构型可以很好地适应模块化桁架中的结构管,可以将本装置内置于桁架的结构管中,可以实现桁架间轴向的紧凑对接。
附图说明
26.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
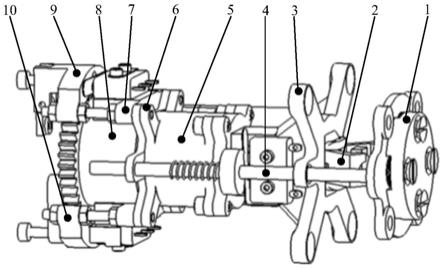
27.图1为本发明实施例所述的一种新型轻简化对接锁紧释放装置在准备捕获状态下的某一角度的结构示意图;
28.图2为本发明所述的一种新型轻简化对接锁紧释放装置在准备捕获状态下的主视图;
29.图3为图2的a-a向剖视图;
30.图4为本发明所述的一种新型轻简化对接锁紧释放装置在准备捕获状态下的另一角度的结构示意图;
31.图5为图4的b-b向剖视图;
32.图6为本发明所述的一种新型轻简化对接锁紧释放装置在锁紧过程中的结构示意图;
33.图7为本发明所述的一种新型轻简化对接锁紧释放装置在完全锁紧状态下的结构示意图;
34.图8为本发明所述的一种新型轻简化对接锁紧释放装置在完全锁紧状态下的主视图;
35.图9为图8的c-c向剖视图。
36.附图标记说明:
37.1-被动端,11-被动端盖,12-碟簧,13-被动端锁头,14-锁紧螺栓;
38.2-丝杆捕获机构,21-触发片,22-丝母,23-滚针轴承,24-直线轴承,25-丝杆,26-扭簧,27-捕获爪;
39.3-丝杆壳体,
40.4-捕获到位触发机构,41-触发杆,42-弹簧,43-触发环,44-捕获开关;
41.5-传动壳体,6-电机架,7-开关架,8-传动齿轮,
42.9-解锁到位触发机构,91-横向解锁杆,92-纵向解锁杆,93-触发轴,94-解锁架,95-解锁片,96-解锁开关;
43.10-锁紧到位触发机构,101-横向锁紧杆,102-纵向锁紧杆,103-锁紧架,104-锁紧开关。
具体实施方式
44.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
45.下面将参考附图并结合实施例来详细说明本发明。
46.如图1-图9所示,一种轻简化对接锁紧释放装置,包括安装在对接飞行器上的被动端1和安装在主动飞行器上的主动端,所述的主动端包括丝杆捕获机构2、丝杆壳体3、捕获到位触发机构4、传动壳体5、锁紧到位触发机构10和解锁到位触发机构9,所述的丝杆壳体3、传动壳体5与开关架7从前到后依次固定连接为一体结构,所述的丝杆捕获机构2置于丝杆壳体3与传动壳体5内部,所述捕获到位触发机构4穿设在丝杆壳体3和传动壳体5的外部,且在弹簧42弹力作用下保持平衡,所述锁紧到位触发机构9与解锁到位触发机构10均与开关架7固连;
47.机械臂带动主动端1靠近被动端,丝杆捕获机构2初步捕获被动端1,待被动端1触发捕获到位机构4时,动力机构驱动丝杆捕获机构2的丝杆25移动,带动被动端1完全被捕获,丝杆25持续移动,直至丝杆捕获机构2触发锁紧到位触发机构10时完成主动端和被动端1的锁紧;动力机构驱动丝杆捕获机构2的丝杆25反方向移动时,丝杆捕获机构2逐渐释放被动端1,待丝杆捕获机构2触发解锁到位触发机构9时完成主动端和被动端1的释放。
48.所述被动端1包括被动端盖11、中心对称分布的四组碟簧12、被动端锁头13和四个锁紧螺栓14,所述被动端锁头13穿过被动端盖11的中心设置,四个所述锁紧螺栓14依次分别穿过被动端锁头13上对应开设的通孔和对应的碟簧12后与被动端盖11固连。碟簧可在锁紧过程中实现弹性加载,避免因加载过度损坏装置。
49.所述丝杆捕获机构2还包括触发片21、丝母22、滚针轴承23、两个直线轴承24、两个扭簧26和两个捕获爪27,所述丝杆25前端加工有与所述丝杆壳体3内部尺寸配合的限制转动的方头槽,两个所述捕获爪27对称布置,且分别与所述丝杆25前端铰接,每个所述扭簧26的一端嵌入相应捕获爪27卡槽中,另一端卡在所述丝杆25内壁上,所述扭簧26使相应的捕获爪27伸出所述丝杆壳体3时逐渐张开,所述丝母22与丝杆25配合,且置于所述传动壳体5内部,所述触发片21与所述丝杆25的后端固连,所述丝母22与传动齿轮8固定连接,所述传动齿轮8为套筒类结构,在套筒的末端设置齿轮与电机上的主动齿轮啮合,套筒的前端伸入传动壳体5内与丝母22固定连接;
50.所述动力机构包括固定在传动壳体5与开关架7之间的电机架6、安装在电机架6上的电机、安装在电机上的主动齿轮和与主动齿轮啮合的传动齿轮8,电机驱动所述传动齿轮8带动所述丝母22旋转,所述丝母22与所述丝杆25间通过螺纹配合,丝杆25由于丝杆壳体3对方头槽进行转动的限位,继而所述丝母22旋转位移转化为所述丝杆25的直线位移。
51.所述捕获到位触发机构4还包括触发杆41、触发环43和捕获开关44,所述捕获开关44固定在所述丝杆壳体3上,所述触发杆41依次穿过所述丝杆壳体3与电机架6外部的限位孔座,所述触发环43穿过所述触发杆41并通过顶丝固接,所述弹簧42套设在所述触发杆41上,且置于所述触发环43与所述电机架6之间,自然状态下弹簧42处于压缩状态带动所述触发环43与所述捕获开关44接触,当被动端1捕获成功时,所述被动端1推动所述触发杆41带动所述触发环43离开所述捕获开关44,传递捕获到位信号,所述主动端完全捕获被动端1。
52.所述锁紧到位触发机构10包括横向锁紧杆101、纵向锁紧杆102、锁紧架103和锁紧开关104,所述锁紧架103与所述开关架7固连,横向锁紧杆101通过铰接在所述锁紧架103上,所述纵向锁紧杆102穿过锁紧架103通孔与所述横向锁紧杆101固定连接,所述锁紧开关104与所述开关架7固连,随着丝杆25带动所述触发片21移动时与所述纵向锁紧杆102接触,带动所述横向锁紧杆101沿铰接点转动,进而触发所述锁紧开关104,传递锁紧到位信号;主动端和被动端1完全锁紧。
53.所述解锁到位触发机构9包括横向解锁杆91、纵向解锁杆92、触发轴93、解锁架94、解锁片95和解锁开关96,所述解锁架94与所述开关架7固连,所述纵向解锁杆92穿过所述解锁架94通孔与横向解锁杆91一端通过螺纹连接,所述触发轴93一端与所述解锁片95固连另一端穿过所述解锁架94通孔与横向解锁杆91另一端固连,所述解锁开关96与所述开关架7固连,随着丝杆25带动所述触发片21移动时与所述解锁片95接触即可带动所述横向解锁杆91移动,进而触发所述解锁开关96,传递解锁到位信号;主动端和被动端1完全解锁。
54.所述被动端锁头13为t字型结构,被动端锁头13的与两捕获爪27配合处设有限位凸台。
55.所述捕获爪27为l型结构,且捕获爪27的长段与丝杆25前端的方头槽铰接,捕获爪27的短段上开设有凹槽,两个凹槽相对布置,两捕获爪转动围合捕获被动端锁头13的限位凸台处。
56.在丝杆25上丝母22的两侧各套设一个直线轴承24,在丝母22与其中一个滚针轴承之间设有一个滚针轴承23;轴承通过挡圈定位,轴承可解决所述丝母即转动又轴向加力过程中与所述传动壳体间摩擦过大问题。
57.一种轻简化对接锁紧释放装置的工作方法,具体包括以下步骤:
58.对接过程:机械臂带动所述主动端靠近被动端1,当被动端1与触发杆41接触时,推动所述触发杆41带动所述触发环43启动所述捕获开关44,所述捕获开关44传递捕获到位信号,随后电机正方向转动驱动所述传动齿轮8带动所述丝母22旋转,所述丝母22与丝杆25间通过螺纹配合,继而丝母22旋转位移转化为丝杆25的直线位移;所述丝杆25运动带动捕获爪27逐渐收回丝杆壳体3内,两捕获爪27间夹角逐渐减小,最终两个捕获爪27完全围合被动端锁头13,所述被动端1被成功捕获;
59.锁紧过程:所述丝杆25持续向同一方向移动,同时被动端1随之移动,直至与丝杆25固连的触发片21与横向锁紧杆101接触,使得所述横向解锁杆101旋转从而带动纵向解锁
杆102触发锁紧开关104,所述锁紧开关104传递锁紧完成信号,电机停止转动,丝杆25停止移动,与此同时弹簧42持续被压缩储能;图7为完全锁紧状态;
60.释放过程:电机反方向转动驱动丝杆25沿反方向移动,所述捕获爪27伸出壳体,在扭簧26作用下两和捕获爪27逐渐张开脱离所述被动端锁头13卡槽,同时所述弹簧42解除压缩状态,辅助丝杆25推动所述被动端1与主动端解锁,所述丝杆25持续向反方向移动,所述触发片21与解锁片95接触,进而带动纵向解锁杆92反方向移动,直至触发解锁开关96,所述解锁开关96传递解锁完成信号,电机停止转动,所述丝杆25停止移动。
61.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1