一种运用AI技术的自动修正航道无人机的制作方法
一种运用ai技术的自动修正航道无人机
技术领域
1.本发明涉及无人机技术领域,具体为一种运用ai技术的自动修正航道无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机这几大类,而在计算机科学中,人工智能(ai)有时被称为机器智能,是由机器展示的智能,与人类和动物展示的自然智能形成对比,通俗地说,“人工智能”一词用来描述模仿人类与其他人类思维相关联的“认知”功能的机器,如“学习”和“解决问题”,随着科技的发展,ai技术已经可以在无人机上进行完美应用。
3.目前现有的无人机技术以及日趋成熟,完善,在调控上可以完成诸多任务,其中对路况的勘察、拍照属于无人机上所具有的基础功能,但现有的无人机内部拍照结构较为复杂,相应的提高了制造和维护成本,同时当无人机在高空中,遇到恶劣情况时,镜头表面容易结霜,从而影响到拍照效果。
技术实现要素:
4.本发明的目的在于提供一种运用ai技术的自动修正航道无人机,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种运用ai技术的自动修正航道无人机,包括机体,所述机体底部固定连接有壳体,所述机体顶部固定连接有框体,所述壳体内部底部固定连接有翻转机构,所述框体内部转动连接有旋转机构,所述框体和壳体内部均固定连接有除雾机构。
6.所述翻转机构包括两个梯形板,两个所述梯形板均固定连接于壳体底部,两个所述梯形板之间设置有辊轴,所述辊轴前侧和后侧均与梯形板转动连接,所述辊轴外部固定连接有第一摄像头本体,所述壳体内腔底部固定连接有第一电机,所述第一电机通过输出轴固定连接有螺纹杆,所述螺纹杆外部设置有螺纹块,所述螺纹块与螺纹杆通过螺纹连接。
7.优选的,所述壳体内腔底部固定连接有矩形板,所述矩形板一侧与螺纹杆一侧转动连接,所述壳体内部转动连接有转动杆,所述转动杆外部固定连接有传动齿轮,所述辊轴外部固定连接有第一皮带轮,所述转动杆外部固定连接有第二皮带轮,所述第一皮带轮与第二皮带轮之间设置有皮带,所述第一皮带轮与第二皮带轮通过皮带连接,所述第二皮带轮设置于传动齿轮后侧,第一皮带轮带动辊轴转动。
8.优选的,所述壳体内部设置有齿条板,所述齿条板底部固定连接有齿条,所述齿条设置于传动齿轮顶部,所述齿条与传动齿轮相啮合,所述螺纹块顶部固定连接有推动板,所述推动板一侧与齿条板一侧固定连接,齿条移动时带动齿轮转动。
9.优选的,所述齿条板顶部固定连接有衔接板,所述衔接板内部设置有第一限位板,
所述第一限位板贯穿衔接板,所述第一限位板两侧分别与壳体内腔两侧壁固定连接,第一限位板对衔接板进行限位。
10.优选的,所述旋转机构包括第二摄像头本体,所述第二摄像头本体设置于框体顶部,所述框体内部固定连接有第二电机,所述第二电机通过输出轴固定连接有第一圆杆,所述第一圆杆一侧与框体内腔一侧壁转动连接,第二电机工作带动第一圆杆转动。
11.优选的,所述框体内腔底部固定连接有齿轮框,所述第一圆杆贯穿齿轮框并与齿轮框转动连接,所述第一圆杆外部固定连接有第一锥齿轮,所述第一锥齿轮与第一圆杆通过单向轴承连接,所述第二摄像头本体底部固定连接有第二圆杆,所述第二圆杆分别贯穿框体和齿轮框顶部并与框体和齿轮框转动连接,所述第二圆杆底部固定连接有第二锥齿轮,所述第二锥齿轮设置于第一锥齿轮顶部,所述第二锥齿轮与第一锥齿轮相啮合,第二圆杆带动第二摄像头本体转动。
12.优选的,所述除雾机构包括第一管体,所述第一管体嵌设与壳体底部壁内,所述第一管体顶部一侧固定连接有第二管体,所述第二管体延伸出壳体底部壁外部并延伸入壳体一侧壁内部,所述第二管体一侧固定连接有滤网,滤网可以对空气中的颗粒物进行过滤。
13.优选的,所述第一管体固定连接有两个,两个所述第一管体分别设置于梯形板两侧,所述第一管体底部固定连接有排气管,所述第一管体内部固定连接有三个加热网,加热网使对进入的空气进行加热。
14.优选的,所述框体顶部开设有通槽,所述框体顶部固定连接有导流板,所述框体内腔底部固定连接有加热板,所述框体内腔顶部转动连接有往复丝杆,所述往复丝杆贯穿齿轮框顶部并与齿轮框转动连接,所述往复丝杆外部固定连接有第三锥齿轮,所述第三锥齿轮底部设置有第四锥齿轮,所述第四锥齿轮与第三锥齿轮相啮合,第一圆杆贯穿第一锥齿轮并与第四锥齿轮通过单向轴承连接,第三锥齿轮带动往复丝杆转动。
15.优选的,所述往复丝杆外部套接有轴承座,所述轴承座与往复丝杆通过滚珠螺母副连接,所述轴承座一侧固定连接有推拉板,所述推拉板一侧设置有棉垫,框体内腔顶部固定连接有第二限位板,所述第二限位板贯穿推拉板,所述第二限位板底部与框体顶部固定连接,推拉板推动棉垫进行上下移动。
16.与现有技术相比,本发明提供了一种运用ai技术的自动修正航道无人机。
17.具备以下有益效果:
18.1、该一种运用ai技术的自动修正航道无人机,通过翻转机构的设计,当第一电机分别处于正转和反转不同转动时,螺纹杆带动螺纹块进行左右移动,螺纹块带动推动板移动,推动板带动齿条板左右移动,齿条板带动齿条移动,齿条带动传动齿轮转动,传动齿轮带动转动杆转动,转动杆带动第二皮带轮转动,第二皮带轮通过皮带带动第一皮带轮转动,第一皮带轮带动辊轴转动,辊轴带动第一摄像头本体进行翻转,以此来实现第一摄像头翻转过程中对前后两侧和底部的环境进行拍摄,可以对无人机底部进行全方位拍摄。
19.2、该一种运用ai技术的自动修正航道无人机,通过旋转机构的设计,当第二电机正转时,第一锥齿轮带动第二锥齿轮转动,第二锥齿轮带动第二圆杆转动,第二圆杆带动第二摄像头本体进行转动,三百六十度旋转拍摄调整角度,通过第二摄像头本体和第一摄像头本体进行合作,可以促使无人机对外界进行全方位拍摄,拍摄效果更好。
20.3、该一种运用ai技术的自动修正航道无人机,通过除雾机构的设计,外界空气进
入第二管体,随后通过第二管体进入第一管体内部,此时第一管体内部的加热网通电产生热量将空气加热,对第一摄像头本体进行吹动,避免第一摄像头表面结霜,同时加热板通电对棉垫进行加热,随后第二电机反转,往复丝杆带动轴承座上下移动,轴承座带动推拉板移动,棉垫通过通槽移动至框体外侧,当第二摄像头本体转动时会与棉垫进行摩擦,从而棉垫将第二摄像头本体表面的霜进行擦拭,整个过程简单便捷,通过简单的结构实现以上功能,具有较大的实用性。
附图说明
21.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
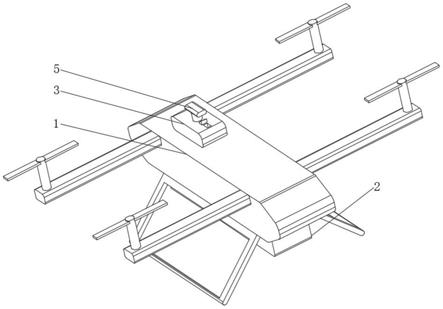
22.图1为本发明结构示意图;
23.图2为本发明结构剖视图;
24.图3为本发明中第一皮带轮的前视剖视图;
25.图4为图2中的a处放大图;
26.图5为图2中的b处放大图。
27.图中:1、机体;2、壳体;3、框体;4、翻转机构;41、梯形板;42、辊轴;43、第一摄像头本体;44、第一电机;45、螺纹杆;46、螺纹块;47、矩形板;48、转动杆;49、传动齿轮;491、第一皮带轮;492、第二皮带轮;493、齿条板;494、齿条;495、推动板;496、第一限位板;5、旋转机构;51、第二摄像头本体;52、第二电机;53、第一圆杆;54、齿轮框;55、第一锥齿轮;56、第二圆杆;57、第二锥齿轮;6、除雾机构;61、第一管体;62、第二管体;63、滤网;64、排气管;65、加热网;66、导流板;67、加热板;68、往复丝杆;69、第三锥齿轮;691、第四锥齿轮;692、轴承座;693、推拉板;694、第二限位板;695、棉垫。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.请参阅图1-5,本发明提供一种技术方案:一种运用ai技术的自动修正航道无人机,包括机体1,机体1底部固定连接有壳体2,机体1顶部固定连接有框体3,壳体2内部底部固定连接有翻转机构4,框体3内部转动连接有旋转机构5,框体3和壳体2内部均固定连接有除雾机构6。
30.翻转机构4包括两个梯形板41,两个梯形板41均固定连接于壳体2底部,两个梯形板41之间设置有辊轴42,辊轴42前侧和后侧均与梯形板41转动连接,辊轴42外部固定连接有第一摄像头本体43,壳体2内腔底部固定连接有第一电机44,第一电机44通过输出轴固定连接有螺纹杆45,螺纹杆45外部设置有螺纹块46,螺纹块46与螺纹杆45通过螺纹连接,壳体2内腔底部固定连接有矩形板47,矩形板47一侧与螺纹杆45一侧转动连接,壳体2内部转动连接有转动杆48,转动杆48外部固定连接有传动齿轮49,辊轴42外部固定连接有第一皮带轮491,转动杆48外部固定连接有第二皮带轮492,第一皮带轮491与第二皮带轮492之间设
置有皮带,第一皮带轮491与第二皮带轮492通过皮带连接,第二皮带轮492设置于传动齿轮49后侧,壳体2内部设置有齿条板493,齿条板493底部固定连接有齿条494,齿条494设置于传动齿轮49顶部,齿条494与传动齿轮49相啮合,螺纹块46顶部固定连接有推动板495,推动板495一侧与齿条板493一侧固定连接,齿条板493顶部固定连接有衔接板,衔接板内部设置有第一限位板496,第一限位板496贯穿衔接板,第一限位板496两侧分别与壳体2内腔两侧壁固定连接。
31.旋转机构5包括第二摄像头本体51,第二摄像头本体51设置于框体3顶部,框体3内部固定连接有第二电机52,第二电机52通过输出轴固定连接有第一圆杆53,第一圆杆53一侧与框体3内腔一侧壁转动连接,框体3内腔底部固定连接有齿轮框54,第一圆杆53贯穿齿轮框54并与齿轮框54转动连接,第一圆杆53外部固定连接有第一锥齿轮55,第一锥齿轮55与第一圆杆53通过单向轴承连接,第二摄像头本体51底部固定连接有第二圆杆56,第二圆杆56分别贯穿框体3和齿轮框54顶部并与框体3和齿轮框54转动连接,第二圆杆56底部固定连接有第二锥齿轮57,第二锥齿轮57设置于第一锥齿轮55顶部,第二锥齿轮57与第一锥齿轮55相啮合。
32.除雾机构6包括第一管体61,第一管体61嵌设与壳体2底部壁内,第一管体61顶部一侧固定连接有第二管体62,第二管体62延伸出壳体2底部壁外部并延伸入壳体2一侧壁内部,第二管体62一侧固定连接有滤网63,第一管体61固定连接有两个,两个第一管体61分别设置于梯形板41两侧,第一管体61底部固定连接有排气管64,第一管体61内部固定连接有三个加热网65,框体3顶部开设有通槽,框体3顶部固定连接有导流板66,框体3内腔底部固定连接有加热板67,框体3内腔顶部转动连接有往复丝杆68,往复丝杆68贯穿齿轮框54顶部并与齿轮框54转动连接,往复丝杆68外部固定连接有第三锥齿轮69,第三锥齿轮69底部设置有第四锥齿轮691,第四锥齿轮691与第三锥齿轮69相啮合,第一圆杆53贯穿第一锥齿轮55并与第四锥齿轮691通过单向轴承连接,往复丝杆68外部套接有轴承座692,轴承座692与往复丝杆68通过滚珠螺母副连接,轴承座692一侧固定连接有推拉板693,推拉板693一侧设置有棉垫695,框体3内腔顶部固定连接有第二限位板694,第二限位板694贯穿推拉板693,第二限位板694底部与框体3顶部固定连接。
33.在实际操作过程中,当此装置使用时,首先将本装置接通电源,由于第一圆杆53分别与第一锥齿轮55和第四锥齿轮691通过单向轴承连接,当第二电机52工作带动第一圆杆53转动时,当第二电机52正转,第一圆杆53带动第一锥齿轮55转动,此时第四锥齿轮691不转动,当第二电机52反转时,第一圆杆53带动第四锥齿轮691转动,此时第一锥齿轮55不转动,在机体1飞行过程中,第一电机44工作带动螺纹杆45转动,当第一电机44分别处于正转和反转不同转动时,螺纹杆45带动螺纹块46进行左右移动,螺纹块46带动推动板495移动,推动板495带动齿条板493左右移动,齿条板493带动齿条494移动,齿条494带动传动齿轮49转动,传动齿轮49带动转动杆48转动,转动杆48带动第二皮带轮492转动,第二皮带轮492通过皮带带动第一皮带轮491转动,第一皮带轮491带动辊轴42转动,辊轴42带动第一摄像头本体43进行翻转,以此来实现第一摄像头翻转过程中对前后两侧和底部的环境进行拍摄,当第二电机52正转时,第一锥齿轮55带动第二锥齿轮57转动,第二锥齿轮57带动第二圆杆56转动,第二圆杆56带动第二摄像头本体51进行转动,三百六十度旋转拍摄调整角度,在无人机向前或者后方飞行时,外界空气进入第二管体62,随后通过第二管体62进入第一管体
61内部,此时第一管体61内部的加热网65通电产生热量将空气加热,随后加热后的空气通过排气管64排出对第一摄像头本体43进行吹动,避免第一摄像头表面结霜,同时加热板67通电对棉垫695进行加热,随后第二电机52反转,此时第四锥齿轮691带动第三锥齿轮69转动,第三锥齿轮69带动往复丝杆68转动,往复丝杆68带动轴承座692上下移动,轴承座692带动推拉板693移动,推拉板693带动棉垫695进行移动,棉垫695通过通槽移动至框体3外侧,当第二摄像头本体51转动时会与棉垫695进行摩擦,从而棉垫695将第二摄像头本体51表面的霜进行擦拭,整个过程简单便捷,通过简单的结构实现以上功能,具有较大的实用性。
34.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1