基于磁流体动力学的动量轮的制作方法
1.本实用新型涉及一种动量轮,特别是涉及一种基于磁流体动力学的动量轮。
背景技术:
2.动量轮作为卫星姿态确定与控制系统中最为重要的控制组件已经得到十分广泛的应用,也发展出了多种形式动量轮以满足不同的应用需求。目前主流的动量轮结构为飞轮结构,由电机带动飞轮转动,利用角动量守恒原理来实现对卫星姿态的控制与调节。但该结构对飞轮、轴承等结构件的对称性和电机可靠性的要求较高,限制了飞轮的使用寿命和调控精度,一般需要配合磁力矩器等其他卸载装置完成卸载过程。
3.磁流体动量轮是一种新型的动量轮,利用电场和磁场产生的洛伦兹力加速导电流体的旋转,进而输出角动量。磁流体动量轮不含一定的机加结构件,具有可靠性高、寿命长、抗冲击等优点。目前国内的许多机构和研究院所在开展磁流体动量轮技术的研究,已公开文献1(专利申请号cn201811428186.5)和文献2(专利申请号cn201811428680.1)介绍了两种基于磁流体动力学设计的用于控制卫星姿态的环形和对称电磁结构,文献3(专利申请号cn201910746524.8)介绍了一种用于航天器的磁流体飞轮,但以上设计均不能实现磁流体动量轮角动量的自我卸载过程,需要配合磁力矩器等其他卸载装置进行卸载。
技术实现要素:
4.本实用新型目的在于克服现有技术的上述缺陷,提供一种可靠性高、结构简单、寿命长、能进行自加载和卸载过程的基于磁流体动力学的动量轮。
5.为实现上述目的,本实用新型基于磁流体动力学的动量轮,其特别之处在于主要由下向扣板式上盖、上敞口桶形下壳体以及封装在上盖下壳体内的上、下密封垫,第一至第四电极,第一、二永磁体,充满导电流体的第一、二环形磁道组成。
6.所述下密封垫自下至上依次将第一永磁体固定一层封装在下壳体内腔下部,将第一电极、第二电极、第三电极及第四电极限位约束二层封装在下壳体内腔中部;所述上密封垫将第二永磁体封固在下壳体内腔上部,同时与下密封垫一起对位于所述电极间内含导电流体的第一环形磁道和第二环形磁道起密封作用;上下方为永磁体的导电流体在洛伦兹力的作用下发生旋转转动产生角动量。第一环形磁道用于角动量的加载,第二环形磁道用于角动量的卸载,该设计实现了动量轮自加载和卸载功能,无需配合其他卸载设备即可单独使用;其中动量轮进行卸载时两个环形磁道内磁场方向相同,电场方向相反。动量轮工作时,第一电极和第二电极通电,第一环形磁道内导电流体发生旋转产生角动量,基于角动量守恒原理对卫星进行调姿;第一环形磁道产生的角动量饱和需要卸载时,第三电极和第四电极通电,第二环形磁道导电流体产生与第一环形磁道导电流体相反的角动量,进而完成动量轮的自卸载过程。具有可靠性高、结构简单、寿命长、能进行自加载和卸载过程的优点。
7.作为优化,所述第一环形磁道由第一电极、第二电极、上密封垫和下密封垫围成;所述第二环形磁道由第三电极、第四电极、上密封垫和下密封垫围成;第二电极侧壁与第三
电极侧壁之间通过下密封垫凸起环形结构物理隔离绝缘,第四电极侧壁与下壳体内侧壁之间通过下密封垫凸起环形结构物理隔离绝缘。
8.作为优化,第一永磁体的厚度大于第二永磁体厚度,动量轮进行卸载时两个环形磁道内磁场方向相同,电场方向相反。
9.作为优化,所述第一电极、第二电极、第三电极和第四电极为环形金属结构,并且均可单独控制电极极性;第一电极和第二电极一个为正极另一个为负极,第三电极和第四电极一个为正极另一个为负极,电场方向为径向。
10.作为优化,所述上盖和下壳体是材质为磁导率高的金属机加工结构件,所述导电流体为粘附力小的导电流体。磁导率高金属优选为轭铁,粘附力小的导电流体优选液态金属汞。
11.作为优化,所述上密封垫和下密封垫的材质具有绝缘、限位和密封作用的陶瓷非金属密封材料;上密封垫设电极接线导引槽,上盖和上密封垫共设联通电极接线导引槽的导线孔,穿过的导引槽及导线孔的电极接线与外界设备进行连接控制。
12.作为优化,所述下壳体是上敞口圆形桶体上端口制有外周横向外凸的圆环兰盘,上盖是圆形兰盘下面向下制有外周与所述上敞口圆形桶体内周口套配的下凸圆盘,圆环兰盘与圆形兰盘外周部通过紧固件连接为一体。圆环兰盘与圆形兰盘外周部通过螺钉螺孔连接为一体。
13.下壳体上敞口圆形桶体内底面与上盖下凸圆盘下端面之间自下至上依次用下密封垫封装第一永磁体层,和第一电极、第二电极、第三电极、第四电极和第一环形磁道及第二环形磁道层;还以下密封垫封装第一永磁体层与第一电极、第二电极、第三电极、第四电极和第一环形磁道及第二环形磁道层之间的间隙层。
14.自上至下依次用上密封垫封装第二永磁体层,和第二永磁体层与第一电极、第二电极、第三电极、第四电极和第一环形磁道及第二环形磁道层之间的间隙层。
15.作为优化,所述第一永磁体和第二永磁体为圆盘形,所述第一电极、第二电极和第三电极及第四电极和第一环形磁道及第二环形磁道为圆环形。
16.上盖下凸圆盘下端面中部贴合圆盘形第二永磁体上端面,圆盘形第二永磁体外侧周面与上敞口圆形桶体上部内侧周面及下凸圆盘下面外周部之间密封固装上密封垫上环形部;上密封垫上环形部下面与第二永磁体下端面下面密封固装上密封垫下圆形部层。
17.下壳体上敞口圆形桶体内底面中部贴合圆盘形第一永磁体下端面,圆盘形第一永磁体外侧周面与下壳体上敞口圆形桶体内底面外周部及下壳体上敞口圆形桶体内侧周壁下部之间密封固装下密封垫下环形部;下密封垫下环形部上面与第一永磁体上端面密封固装下密封垫上圆形部层。
18.上密封垫下圆形部层下面与下密封垫上圆形部层上面之间是以绝缘、限位和密封方式封装第一电极、第二电极、第三电极、第四电极和第一环形磁道及第二环形磁道层的下密封垫上凸中心圆柱部、上凸周边圆环部、上凸中间圆环部。
19.作为优化,下密封垫上圆形部层向上密封垫下圆形部层下面设制有上凸中心圆柱部、上凸周边圆环部、上凸中间圆环部;上凸中心圆柱部外侧周以绝缘、限位和密封方式衬封圆环形第一电极,上凸周边圆环部内侧周以绝缘、限位和密封方式衬封圆环形第四电极,上凸中间圆环部内外侧周部分别以绝缘、限位和密封方式衬封圆环形第二电极和圆环形第
三电极。
20.圆环形第一电极外侧周面和圆环形第二电极内侧周面与上密封垫下圆形部层下面和下密封垫上圆形部层上面之间为以绝缘、限位和密封方式封闭的第一环形磁道;圆环形第三电极外侧周面和圆环形第四电极内侧周面与上密封垫下圆形部层下面和下密封垫上圆形部层上面之间为以绝缘、限位和密封方式封闭的第二环形磁道。
21.作为优化,一侧的上密封垫上环形部及其下方的上密封垫下圆形部和上方的上盖设置竖向导线孔;所述第一电极、第二电极、第三电极、第四电极、第一永磁体与下密封垫之间采用胶液粘接固定;第二永磁体与上密封垫之间采用胶液粘接,胶层厚度小于0.1mm。上密封垫和下密封垫上下面贴合处涂有密封脂。
22.即本实用新型基于磁流体动力的动量轮结构包含上盖、下壳体、上密封垫、下密封垫、第一永磁体、第二永磁体、第一电极、第二电极、第三电极、第四电极、第一环形磁道、第二环形磁道和导线孔组成;下密封垫位于下壳体底部,用于固定第一永磁体,同时对第一电极、第二电极、第三电极和第四电极起限位约束作用;第一电极和第二电极围成第一环形磁道,第三电极和第四电极围成第二环形磁道,第一环形磁道和第二环形磁道磁道内含有导电流体,上下两端为永磁体,在洛伦兹力的作用下导电流体发生转动;上密封垫用于固定第二永磁体,同时与下密封垫一起对第一环形磁道和第二环形磁道起密封作用;结构上盖与下壳体用螺钉连接为一体。
23.所述第一电极、第二电极、第三电极、第四电极为环形金属结构,第一电极和第二电极一个为正极另一个为负极,第三电极和第四电极一个为正极另一个为负极,电场方向为径向;第二电极和第三电极间通过下垫圈结构物理隔离绝缘。
24.所述上密封垫和下密封垫为陶瓷非金属密封材料,同时具有绝缘和密封作用;上密封垫含电极接线导引槽,与外界设备进行连接。
25.所述第一永磁体和第二永磁体通过上、下垫圈与上盖和下壳体固定,第一环形磁道和第二环形磁道含高强度的垂直磁场,磁场方向为轴向。
26.所述第一环形磁道和第二环形磁道内充满导电流体,磁场与电场方向垂直,在洛伦兹力的作用下,导电流体发生旋转运动产生角动量。
27.所述第一电极、第二电极、第三电极、第四电极、第一永磁体与下密封垫采用胶液粘接固定;第二永磁体与上密封垫采用胶液粘接。
28.本新型与现有技术相比具有如下有益效果:(1)本新型含两个磁流体腔式环形磁道,第一磁流体腔式环形磁道用于角动量的加载,第二磁流体腔式环形磁道用于角动量的卸载,该设计实现了动量轮自加载和卸载功能,无需配合其他卸载设备即可单独使用。(2)本新型结构简单,装配方便;上密封垫和下密封垫单独设计,密封性好,可为磁极和导流环提供力学支撑,同时起到物理隔离绝缘和限位作用。(3)本新型永磁体位于环形磁道上下两侧,加载磁道和卸载磁道共用永磁体,设计灵活,能为磁流体域提供高强度的稳定均匀磁场;永磁体与动量轮封闭结构壳体直接接触,漏磁少。
29.采用上述技术方案后,本实用新型基于磁流体动力学的动量轮具有密封性好,可靠性高、结构简单,漏磁少、寿命长,能进行自加载和卸载过程的优点。
附图说明
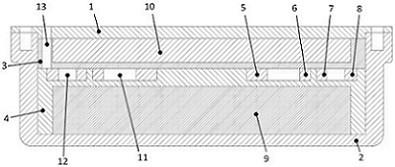
30.图1是本实用新型基于磁流体动力学的动量轮的剖视结构示意图;图2是本实用新型基于磁流体动力学的动量轮的装配结构示意图。
具体实施方式
31.如图所示,本实用新型基于磁流体动力学的动量轮主要由下向扣板式上盖1、上敞口桶形下壳体2以及封装在上盖下壳体内的上密封垫3、下密封垫4、第一电极5、第二电极6、第三电极7、第四电极8、第一永磁体9、第二永磁体10、充满导电流体的第一环形磁道11、充满导电流体的第二环形磁道12组成。所述下密封垫4自下至上依次将第一永磁体9固定一层封装在下壳体2内腔下部,和第一电极5、第二电极6、第三电极7及第四电极8限位约束二层封装在下壳体2内腔中部;所述上密封垫3将第二永磁体10封固在下壳体2内腔上部,同时与下密封垫4一起对位于所述电极间内含导电流体的第一环形磁道11和第二环形磁道12起密封作用;上下方为永磁体的导电流体在洛伦兹力的作用下导电流体发生旋转转动产生角动量。第一环形磁道用于角动量的加载,第二环形磁道用于角动量的卸载,该设计实现了动量轮自加载和卸载功能,无需配合其他卸载设备即可单独使用;其中动量轮进行卸载时两个环形磁道内磁场方向相同,电场方向相反。此动量轮工作时,第一电极5和第二电极6通电,第一环形磁道11内导电流体发生旋转产生角动量,基于角动量守恒原理对卫星进行调姿;第一环形磁道11产生的角动量饱和需要卸载时,第三电极7和第四电极8通电,第二环形磁道12导电流体产生与第一环形磁道11导电流体相反的角动量,进而完成动量轮的自卸载过程。具有可靠性高、结构简单、寿命长、能进行自加载和卸载过程的优点。
32.所述第一环形磁道11由第一电极5、第二电极6、上密封垫3和下密封垫4围成;所述第二环形磁道12由第三电极7、第四电极8、上密封垫3和下密封垫4围成;第二电极6侧壁与第三电极7侧壁之间通过下密封垫4凸起环形结构物理隔离绝缘,第四电极8侧壁与下壳体2内侧壁之间通过下密封垫4凸起环形结构物理隔离绝缘。第一永磁体9的厚度大于第二永磁体10厚度,动量轮进行卸载时两个环形磁道内磁场方向相同,电场方向相反。所述第一电极5、第二电极6、第三电极7和第四电极8为环形金属结构,并且均可单独控制电极极性;第一电极5和第二电极6一个为正极另一个为负极,第三电极7和第四电极8一个为正极另一个为负极,电场方向为径向。所述上盖1和下壳体2是材质为磁导率高的金属机加工结构件,所述导电流体为粘附力小的导电流体。磁导率高金属优选为轭铁,粘附力小的导电流体优选液态金属汞。所述上密封垫3和下密封垫4由具有绝缘、限位和密封作用的陶瓷非金属密封材料制成;上密封垫3设电极接线导引槽,上盖1和上密封垫3共设联通电极接线导引槽的导线孔13,穿过的导引槽及导线孔13的电极接线与外界设备进行连接控制。
33.所述下壳体2是上敞口圆形桶体上端口制有外周横向外凸的圆环兰盘,上盖1是圆形兰盘下面向下制有外周与所述上敞口圆形桶体内周口套配的下凸圆盘,圆环兰盘与圆形兰盘外周部通过紧固件连接为一体。圆环兰盘与圆形兰盘外周部通过螺钉螺孔连接为一体。
34.下壳体上敞口圆形桶体内底面与上盖1下凸圆盘下端面之间自下至上是依次用下密封垫4封装第一永磁体9层,和第一电极5、第二电极6、第三电极7、第四电极8和第一环形磁道11及第二环形磁道12层,还以下密封垫4封装第一永磁体9层与第一电极5、第二电极6、
第三电极7、第四电极8和第一环形磁道11及第二环形磁道12层之间的间隙层。
35.自上至下是依次用上密封垫3封装第二永磁体10层,和第二永磁体10层与第一电极5、第二电极6、第三电极7、第四电极8和第一环形磁道11及第二环形磁道12层之间的间隙层。
36.所述第一永磁体9和第二永磁体10为圆盘形,所述第一电极5、第二电极6和第三电极7及第四电极8和第一环形磁道11及第二环形磁道12为圆环形。
37.上盖1下凸圆盘下端面中部贴合圆盘形第二永磁体10上端面,圆盘形第二永磁体10外侧周面与上敞口圆形桶体上部内侧周面及下凸圆盘下面外周部之间密封固装上密封垫3上环形部;上密封垫3上环形部下面与第二永磁体10下端面下面密封固装上密封垫3下圆形部层。
38.下壳体上敞口圆形桶体内底面中部贴合圆盘形第一永磁体9下端面,圆盘形第一永磁体9外侧周面与下壳体上敞口圆形桶体内底面外周部及下壳体上敞口圆形桶体内侧周壁下部之间密封固装下密封垫4下环形部;下密封垫4下环形部上面与第一永磁体9上端面密封固装下密封垫4上圆形部层。
39.上密封垫3下圆形部层下面与下密封垫4上圆形部层上面之间是以绝缘、限位和密封方式封装第一电极5、第二电极6、第三电极7、第四电极8和第一环形磁道11及第二环形磁道12层的下密封垫4上凸中心圆柱部、上凸周边圆环部、上凸中间圆环部。
40.下密封垫4上圆形部层向上密封垫3下圆形部层设制有上凸中心圆柱部、上凸周边圆环部、上凸中间圆环部;上凸中心圆柱部外侧周以绝缘、限位和密封方式衬封圆环形第一电极5,上凸周边圆环部内侧周以绝缘、限位和密封方式衬封圆环形第四电极8,上凸中间圆环部内外侧周部分别以绝缘、限位和密封方式衬封圆环形第二电极6和圆环形第三电极7。
41.圆环形第一电极5外侧周面和圆环形第二电极6内侧周面与上密封垫3下圆形部层下面和下密封垫4上圆形部层上面之间为以绝缘、限位和密封方式封闭的第一环形磁道11;圆环形第三电极7外侧周面和圆环形第四电极8内侧周面与上密封垫3下圆形部层下面和下密封垫4上圆形部层上面之间为以绝缘、限位和密封方式封闭的第二环形磁道12。一侧的上密封垫3上环形部及其下方的上密封垫3下圆形部和上方的上盖1设置竖向导线孔13;所述第一电极、第二电极、第三电极、第四电极、第一永磁体与下密封垫之间采用胶液粘接固定;胶层厚度小于0.1mm。第二永磁体与上密封垫之间采用胶液粘接,上密封垫3和下密封垫4贴合处涂有密封脂。
42.为使本新型的目的、技术方案和优点更加清楚,下面将结合附图对本新型及运行方式做进一步详细描述。
43.本基于磁流体动力学的动量轮包含上盖1、下壳体2、上密封垫3、下密封垫4、第一电极5、第二电极6、第三电极7、第四电极8、第一永磁体9、第二永磁体10、第一环形磁道11、第二环形磁道12和导线孔13组成。
44.第一永磁体9与下密封垫4胶粘接,第二永磁体10与上密封垫3胶粘接,胶层厚度小于0.1mm;第一电极5、第二电极6、第三电极7和第四电极8与下密封垫4局部点胶粘接,第一电极5和第二电极6围成第一环形磁道11,第三电极7和第四电极8围成第二环形磁道12,第一环形磁道11和第二环形磁道12内充满导电流体,电场方向为径向;第一电极5、第二电极6、第三电极7和第四电极8导引线从导线孔13引出后将上密封垫3与下密封垫4贴合,环形磁
道轴向充满高强度磁场;上盖1和下壳体2用螺钉固定连接为一体。
45.第一电极5和第四电极8接正极,第二电极6和第三电极7接负极,通电后在洛伦兹力的作用下导电流体会发生旋转运动,进而产生角动量;第一环形磁道11和第二环形磁道12内磁场方向相同,电场方向相反,导电流体的旋转方向相反,可产生不同方向的角动量。
46.动量轮工作时,第一电极5和第二电极6通电,第一环形磁道11内导电流体发生旋转产生角动量,基于角动量守恒原理对卫星进行调姿;第一环形磁道11产生的角动量饱和需要卸载时,第三电极7和第四电极8通电,第二环形磁道12导电流体产生与第一环形磁道11导电流体相反的角动量,进而完成动量轮的自卸载过程。
47.所述上密封垫3和下密封垫4为陶瓷密封材料,其中上密封垫3含第一电极5、第二电极6、第三电极7导线导引槽,导线通过上密封垫的导线孔13引出;上密封垫3和下密封垫4贴合处涂有少量密封脂。所述导电流体为液态金属汞等粘附力小的导电流体。所述上盖1和下壳体2为轭铁材料机加结构件,上盖1和下壳体2分别与第一永磁体9和第二永磁体10直接接触。
48.总之,本实用新型基于磁流体动力学的动量轮具有密封性好,可靠性高、结构简单,漏磁少、寿命长,能进行自加载和卸载过程的优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1