一种创新型立式垂直起降固定翼无人机的制作方法
1.本实用新型涉及一种创新型立式垂直起降固定翼无人机。
背景技术:
2.现有的固定翼无人机的主翼大部分为组装式结构,主翼一般由两个分段构成,在进行机体两侧的主翼组装时,需要利用一根碳管横穿机体,然后实现主翼与机体的稳定连接,上述组装及碳管的应用,导致现有的固定无人机存在以下问题:第一,上述组装方式时间长,导致无人机现场组装效率较低,不利于无人机快速执行现场监测任务;第二,碳管的长度较长,增加了无人机的整体重量,继而不利于无人机飞行时间的延长;第三,因碳管横穿机体,导致机舱只能设计成分离式,从而降低机舱利用率;第四,无人机起飞用的螺旋桨设置在主翼上,从而在主翼组装时,同时进行信号传输线路的对接,信号传输线路采用对接方式连接,在无人机长时间飞行过程中,常出现传输线路对接松动现象,线路松动则导致电源或信号传输中断,从而导致无人机出现失控现象。
技术实现要素:
3.本实用新型的目的在于提供一种创新型立式垂直起降固定翼无人机,该无人机主翼和垂直翼均采用折叠方式进行组装,其组装效率高,利于飞行任务的快速执行;无碳管横穿机舱,继而提高了机舱的空间利用率;无人机的电源及信号传输管路均采用整段方式设置在机体及固定主翼上,从而在飞行过程中,不会出现管路对接松动现象,继而保证电源及信号的稳定传输。
4.本实用新型解决其技术问题所采取的技术方案是:一种创新型立式垂直起降固定翼无人机,包括机体,在所述机体的前部左右两侧各设置一鸭翼,在所述机体的后部左右两侧各设置一主翼,在所述主翼的后侧设置有副翼,在所述机体后侧设置有两个垂直翼,其特征是,所述主翼和副翼远离机体尾部的一段能够同步向机体腹部方向进行摆动折叠收起,且能够展开,所述垂直翼远离机体尾部的一段能够向主翼方向进行摆动折叠收起,且能够展开。
5.优选地,所述主翼包括固定主翼和可折叠主翼,可折叠主翼和固定主翼的对接处下侧通过第一铰接机构实现铰接连接,可折叠主翼和固定主翼的对接处上侧通过一第一卡接机构实现稳定卡置连接,所述副翼包括固定副翼和可折叠副翼,所述固定副翼相应的设置在所述固定主翼上,所述可折叠副翼相应的设置在所述可折叠主翼上,且可折叠副翼和固定副翼的对接处下侧通过第二铰接机构实现铰接连接。
6.进一步地,所述垂直翼包括固定垂直翼和可折叠垂直翼,所述固定垂直翼和可折叠垂直翼的对接处外侧,通过第三铰接机构实现铰接连接,所述固定垂直翼和可折叠垂直翼的对接处内侧,通过第二卡接机构实现稳定卡置连接。
7.进一步地,在所述固定主翼的前侧或鸭翼的后侧设有无人机飞行用螺旋桨。
8.进一步地,所述第一铰接机构和第三铰接机构均包括至少两个阻尼铰链,所述第
二铰接机构至少包括一个阻尼铰链,所述第一卡接机构和第二卡接机构均包括至少一个搭扣。
9.优选地,在两个所述鸭翼前侧均安装一用于辅助实现避障功能的第一摄像头,在两个所述鸭翼的下侧均安装一用于辅助实现地形跟踪功能的第二摄像头。
10.进一步地,在所述机体后部两侧均设置一用于辅助实现无人机精准降落功能的第三摄像头,在所述机体的下部设置一用于辅助实现无人机精准降落功能的激光测距仪。
11.本实用新型的有益效果是:本实用新型结构简单,加工制造便利;在实际应用中,可折叠主翼、可折叠副翼和可折叠垂直翼,可迅速展开并固定,继而利于快速实现无人机现场组装,从而便于提高无人机执行飞行任务的效率;可折叠主翼和垂直翼采用折叠方式收起,使得无人机占用空间小,继而利于无人机的存放及搬运;无人机的电源及信号传输管路均采用整段方式设置在机体及固定主翼上,从而在飞行过程中,不会出现管路对接松动现象,继而保证电源及信号的稳定传输;碳管应用的取消,不仅降低了无人机的整体重量,同时,也利于提高机舱的整体利用率,便于机舱内各控制器元件合理分布。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的部分优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
13.图1为本实用新型的整体结构示意图;
14.图2为本实用新型的整体结构侧视图;
15.图3为本实用新型折叠后的状态示意图;
16.图4为图1中a处放大图;
17.图5为图1中b处放大图;
18.图6为图1中c处放大图;
19.图7为图2中d处放大图;
20.图8为支撑腿相对于机体展开状态示意图;
21.图9为螺旋桨设置在鸭翼后边缘上的一种实施例示意图。
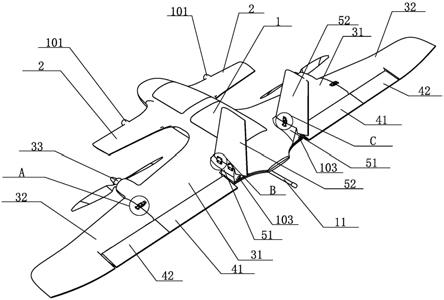
22.图中:1机体、11支撑腿、2鸭翼、31固定主翼、32可折叠主翼、33螺旋桨、41固定副翼、42可折叠副翼、51固定垂直翼、52可折叠垂直翼、6阻尼铰链、7搭扣、101第一摄像头、102第二摄像头、103第三摄像头、104激光测距仪、201第一机体、202第一鸭翼、 203第一螺旋桨。
具体实施方式
23.下面将结合具体实施例及附图1
‑
9,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分优选实施例,而不是全部的实施例。本领域技术人员可以在不违背本实用新型内涵的情况下做类似变形,因此本实用新型不受下面公开的具体实施例的限制。
24.本实用新型提供了一种创新型立式垂直起降固定翼无人机(如图1所示),包括机
体1,在所述机体1的前部左右两侧各设置一鸭翼2,在所述机体1的后部左右两侧各设置一主翼,在所述主翼的后侧设置有副翼,副翼在主翼上进行摆动的具体实施技术方案,为本领域内公知技术,故,在此,不再做详细描述;在所述机体1后侧设置有两个垂直翼,所述主翼和副翼远离机体尾部的一段能够同步向机体腹部方向进行摆动折叠收起,且能够展开,所述垂直翼远离机体尾部的一段能够向主翼方向进行摆动折叠收起,且能够展开。
25.在本具体实施例中,主翼和副翼进行折叠收起及展开的具体实施方式为:所述主翼包括固定主翼31和可折叠主翼32,可折叠主翼32和固定主翼31的对接处下侧通过第一铰接机构实现铰接连接,在本具体实施例中,第一铰接机构至少包括两个阻尼铰链6,通过阻尼铰链6的连接,实现固定主翼31和可折叠主翼32的铰接连接,从而实现可折叠主翼32向机体腹部方向的摆动,可折叠主翼32和固定主翼31的对接处上侧通过一第一卡接机构实现稳定卡置连接,在本具体实施例中,第一卡接机构至少包括一个搭扣7,通过搭扣7的连接作用,可实现可折叠主翼32和固定主翼31的稳定对接,从而确保无人机在飞行时,主翼的结构稳定性,当飞行任务结束后,将搭扣7打开,便可顺利实现可折叠主翼32的折叠收起。所述副翼包括固定副翼41和可折叠副翼42,所述固定副翼41相应的设置在所述固定主翼31上,所述可折叠副翼42相应的设置在所述可折叠主翼32上,且可折叠副翼42和固定副翼41的对接处下侧通过第二铰接机构实现铰接连接,在本具体实施例中,第二铰接机构至少包括一个阻尼铰链6,通过阻尼铰链6的连接,实现可折叠副翼42和固定副翼41的铰接连接,继而便于实现可折叠副翼42向机体腹部方向的摆动,同时,也可顺利实现固定副翼41带动可折叠副翼42相对于主翼的摆动动作,因可折叠副翼42是设置在可折叠主翼32上的,从而可保证可折叠副翼42和可折叠主翼32进行同步折叠动作,同时,在可折叠主翼32实现稳定展开时,可折叠副翼42也可实现稳定展开。
26.在本具体实施例中,垂直翼实现折叠和展开的具体实施方式为:所述垂直翼包括固定垂直翼51和可折叠垂直翼52,所述固定垂直翼51和可折叠垂直翼52的对接处外侧,通过第三铰接机构实现铰接连接,在本具体实施例中,第三铰接机构至少包括两个阻尼铰链6,通过两个阻尼铰链6实现固定垂直翼51和可折叠垂直翼52的铰接连接,从而实现可折叠垂直翼52向主翼方向的摆动收起,所述固定垂直翼51和可折叠垂直翼52的对接处内侧,通过第二卡接机构实现稳定卡置连接,在本具体实施例中,第二卡接机构至少包括一个搭扣7,在可折叠垂直翼52展开后,通过搭扣7的连接作用,可实现固定垂直翼51和可折叠垂直翼在飞行过程中的稳定连接,继而确保无人机的稳定飞行。
27.在实际应用中,用于无人机起飞、平飞和降落的螺旋桨33,可设置在固定主翼31的前侧或鸭翼2的后侧,螺旋桨33设置在固定主翼31上的实施例如图1所示,两个螺旋桨33对称分布在固定主翼31上,螺旋桨33设置在鸭翼2的后侧的实施例如图9所示,两个第一鸭翼202对称设置在第一机体201的两侧,两个第一螺旋桨203对称设置在两个第一鸭翼202 的后边缘上。螺旋桨33设置在鸭翼2或固定主翼31上,因鸭翼2和固定主翼31为固定结构,从而使得传送螺旋桨33用的电源及信号管线为整段式分布,继而避免了管线松动现象的出现,确保螺旋桨33的可靠运转;进一步地,在机腹上设置一可自动摆动的支撑腿11,在无人机降落时,支撑腿11的摆动端向远离机腹的方向展开(如图8所示),从而在无人机降落在地面上后,为无人机提供支撑,使得无人机稳定站立的地面上,在无人机起飞后,支撑腿 11的摆动端向靠近机腹的方向摆动,从而实现支撑腿11的收起,支撑腿11收起后,减小了飞机飞行阻
力,利于提高无人机飞行的可靠性,同时,支撑腿11收起后,可避免支撑腿11 对无人机腹部安装的监测云台视线的遮挡,使得监测云台顺利进行360度无遮挡监测。
28.在实际应用中,为提高无人机飞行可靠性,在此,在两个所述鸭翼2前侧均安装一用于辅助实现避障功能的第一摄像头101,利用第一摄像头101可实时监控无人机飞行时,前方的飞行状况,并将飞行状况信息传递给无人机控制器,便于无人机控制器实时分析飞行状况,并根据分析结果,控制无人机飞行姿态,以便无人机避开前行障碍;为提高无人机的监测功能,在此,在两个所述鸭翼2的下侧均安装一用于辅助实现地形跟踪功能的第二摄像头102,利用第二摄像头102,便于无人机在平飞时,实现其下方的地形跟踪;为提高无人机的降落可靠性,在此,在所述机体后部两侧均设置一用于辅助实现无人机精准降落功能的第三摄像头 103,在所述机体的下部设置一用于辅助实现无人机精准降落功能的激光测距仪104,无人机控制器通过分析第三摄像头103实时传输的图像及激光测距仪104的测量数据,来控制无人机的实时飞行姿态,从而便于实现无人机的精准降落。
29.除说明书所述的技术特征外,均为本专业技术人员的已知技术。
30.以上所述结合附图对本实用新型的优选实施方式和实施例作了详述,但是本实用新型并不局限于上述实施方式和实施例,对于本技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1