一种无人机红外线测距装置
1.本实用新型涉及无人机零部件技术领域,尤其涉及一种无人机红外线测距装置。
背景技术:
2.无人机是一种无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器,在工作中一般由操作员操作无人机的飞行路径,但由于无人机在低空飞行时,周围会出现很多障碍物,操作员在地面会难以精确观测无人机的实际飞行状,因此就需要在无人机上安装红外测距装置,用于无人机与障碍物保持安全距离。
3.但是目前的无人机均在前后安装两个红外线测距装置,且该红外线测距装置的角度是固定的,无法根据无人机的飞行轨迹及时调整红外线测距装置的角度,容易出现测距盲角,影响无人机的飞行安全。另外,用于处理红外测距装置的单片机和模数转换器等芯片均位于无人机内部,当红外线测距装置出现故障时,需要将无人机拆卸后才能维修,因此本实用新型提出一种无人机红外线测距装置。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种无人机红外线测距装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种无人机红外线测距装置,包括固定盘,所述固定盘中部两侧均开设有凹槽,所述凹槽内部通过转轴转动连接有主动齿轮和从动齿轮,所述主动齿轮和从动齿轮相互远离的一侧分别通过转轴转动连接有第一调节齿轮和第二调节齿轮,所述第一调节齿轮和第二调节齿轮中部的转轴表面均固定套接有转动杆,所述转动杆另一端固定连接有第一红外模块,所述固定盘下表面两侧均固定有微型电机,且微型电机为精密伺服电机,所述固定盘顶端开设有顶腔,且顶腔内底壁设有单片机和模数转换器,所述顶腔顶端设有顶盖。
6.进一步的,所述微型电机的驱动端与主动齿轮中部的转轴固定连接,所述主动齿轮与从动齿轮和第一调节齿轮啮合连接,所述第二调节齿轮与从动齿轮啮合连接,便于通过微型电机同时带动第一调节齿轮和第二调节齿轮转动,进而调节第一红外模块的角度。
7.进一步的,所述主动齿轮和从动齿轮的齿数相同,所述第一调节齿轮和第二调节齿轮齿数相同,且主动齿轮和从动齿轮齿数多于第一调节齿轮和第二调节齿轮的齿数,当主动齿轮和从动齿轮转动较小的角度时,第一调节齿轮和第二调节齿轮就会大幅度转动,从而实现第一红外模块角度的快速调节。
8.进一步的,所述固定盘下表面中部固定有控制器,且微型电机与控制器电性连接,控制器与无人机内部控制电路连接,当无人机飞行轨迹改变后,控制器就会控制微型电机转动。
9.进一步的,所述固定盘外侧壁固定有四个固定杆,四个所述固定杆另一端均固定有第二红外模块,所述第一红外模块和第二红外模块均包括红外发射头和红外接收头,便
于通过多个第一红外模块和多个第二红外模块全方位的测量无人机周围障碍物的距离。
10.进一步的,所述第一红外模块和第二红外模块均与模数转换器电性连接,所述模数转换器与单片机电性连接,单片机与无人机内部警报模块电性连接,当第一红外模块或第二红外模块检测到无人机与障碍物之间的距离处于危险距离时,无人机就会发出报警。
11.进一步的,所述固定盘上表面两侧均固定有连接板,且连接板中部开设有安装孔,便于通过连接板将整个装置安装在无人机外部。
12.本实用新型的有益效果:
13.本实用新型在使用时,通过设置固定盘,固定盘两侧开设有两个凹槽,两个凹槽内部均设有主动齿轮、从动齿轮、第一调节齿轮和第二调节齿轮,而第一调节齿轮和第二调节齿轮中部的连接轴表面均固定套有转动杆,转动杆一端连接有第一红外模块,并且主动齿轮中部的连接轴与固定盘底部的微型电机的驱动端相连接,从而当无人机在飞行时,通过微型电机的转动就可以带动转动杆转动,使得无人机在飞行时,第一红外模块可以及时调节角度来测量与障碍物之间的距离,提高无人机在高速飞行过程中的安全性。另外,该装置通过连接板安装在无人机外部底端,从而便于对该装置进行安装或拆卸,维修起来更加简单方便。
附图说明
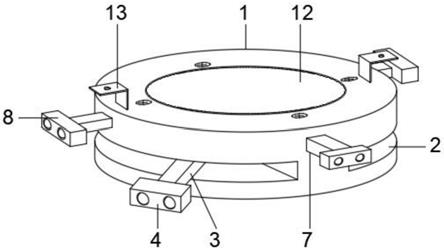
14.图1为本实用新型的立体图;
15.图2为本实用新型的俯剖图;
16.图3为本实用新型的主剖图。
17.图例说明:
18.1、固定盘;2、凹槽;21、主动齿轮;22、从动齿轮;23、第一调节齿轮;24、第二调节齿轮;3、转动杆;4、第一红外模块;5、微型电机;6、控制器;7、固定杆;8、第二红外模块;9、顶腔;10、单片机;11、模数转换器;12、顶盖;13、连接板。
具体实施方式
19.如图1-3所示,涉及一种无人机红外线测距装置,包括固定盘1,固定盘1中部两侧均开设有凹槽2,凹槽2内部通过转轴转动连接有主动齿轮21和从动齿轮22,主动齿轮21和从动齿轮22相互远离的一侧分别通过转轴转动连接有第一调节齿轮23和第二调节齿轮24,第一调节齿轮23和第二调节齿轮24中部的转轴表面均固定套接有转动杆3,转动杆3另一端固定连接有第一红外模块4,固定盘1下表面两侧均固定有微型电机5,且微型电机5为精密伺服电机,固定盘1顶端开设有顶腔9,且顶腔9内底壁设有单片机10和模数转换器11,顶腔9顶端设有顶盖12。固定盘1外侧壁固定有四个固定杆7,四个固定杆7另一端均固定有第二红外模块8,第一红外模块4和第二红外模块8均包括红外发射头和红外接收头。固定盘1上表面两侧均固定有连接板13,且连接板13中部开设有安装孔。
20.如图2和图3所示,微型电机5的驱动端与主动齿轮21中部的转轴固定连接,主动齿轮21与从动齿轮22和第一调节齿轮23啮合连接,第二调节齿轮24与从动齿轮22啮合连接。主动齿轮21和从动齿轮22的齿数相同,第一调节齿轮23和第二调节齿轮24齿数相同,且主动齿轮21和从动齿轮22齿数多于第一调节齿轮23和第二调节齿轮24的齿数。固定盘1下表
面中部固定有控制器6,且微型电机5与控制器6电性连接。第一红外模块4和第二红外模块8均与模数转换器11电性连接,模数转换器11与单片机10电性连接。
21.使用时:通过连接板13将该装置安装在无人机底端,当无人机正常前后左右飞行时,与固定杆7连接的第二红外模块8会测量正前后左右的障碍物距离,当无人机飞行轨迹并非正向前或正向后时,控制器6就会控制对应的微型电机5转动,通过微型电机5带动主动齿轮21转动,主动齿轮21就会带动从动齿轮22转动,而主动齿轮21和从动齿轮22会同时带动第一调节齿轮23和第二调节齿轮24转动,进而带动第一调节齿轮23和第二调节齿轮24中部转轴表面的转动杆3转动,使得对应的第一红外模块4朝向无人机飞行的方向转动,用于测量无人机飞行方向上的障碍物距离。当飞行过程中,无人机前方有障碍物时,第一红外模块4或第二红外模块8上的红外发射头发出红外线被障碍物反射后,由红外接收头接收,接着由模数转换器11将发射和接收的时间差信息传递到单片机10进行计算,算出无人机与障碍物之间的距离,如果该距离小于安全距离时,无人机内部的警报模块就会发出警报,而警报模块为无人机现有技术,不再赘述。
22.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1