具有安装机构的机器人无人驾驶飞行器的制作方法
具有安装机构的机器人无人驾驶飞行器
1.本技术为分案申请,原申请的申请日是2017年4月3日、申请号是201780018720.2、发明名称为“具有安装机构的机器人无人驾驶飞行器”。
2.本技术要求于2016年4月17日提交的美国临时专利申请62/323,723的优先权,所述申请的内容特此以引用的方式全部并入。
技术领域
3.本发明属于移动机器人领域。更具体地说,属于能够执行各种实用任务的机器人无人驾驶飞行器领域。
技术实现要素:
4.本发明是一种机器人无人驾驶飞行器(以下简称“uarv”),其可以穿过空气飞到物体上、在所述物体附近悬停就位、并且使用安装机构将自身临时安装在所述物体上的位置处。
5.所设想的uarv的第一优选示例性实施例包括:全向垂直升降无人机,其具有附接到uarv主体的一个或多个推进器;安装机构,其包括具有多个链接板的一个或多个夹持臂;以及可缩回的活动工具臂,其具有附接到所述uarv主体的近端和具有用于执行一项或多项实用功能的工具部件的远端。
6.所述uarv可以穿过大气飞到与物体上的安装位置相邻的位置,所述物体如树、电线杆、建筑物等...。所述uarv可以悬停在所述安装位置旁边,同时所述夹持臂在一个或多个引导柱的帮助下展开并操纵成围绕所述安装位置。优选实施例利用动态平衡系统,当所述夹持臂在安装和拆卸操作期间和/或在实用系统操作期间移动时,所述动态平衡系统转移uarv内部电池的重量以帮助维持uarv的平衡。一旦夹持臂在安装位置处就位,uarv就通过向夹持臂施加收缩力而安装到物体上,所述收缩力使夹持臂在安装位置处基本上围绕并牢固地包裹物体的外边缘。一旦夹持臂在安装位置处牢固地夹紧到物体上,uarv就将稳固且可靠地安装。
7.在本文所述的其它所设想实施例中,安装机构包括安装臂,所述安装臂具有附接到uarv主体的近端和具有夹持机构的远端,所述夹持机构具有多个夹持钳口。在这种实施例中,可设想,安装臂被操纵以便将夹持钳口放置在安装位置周围。一旦夹持钳口在安装位置处就位,uarv就通过向夹持钳口施加夹紧力而安装到物体上,所述夹紧力使夹持钳口朝着彼此移动,使得夹持钳口在安装位置处夹紧到物体上。优选地,安装臂然后相对于uarv主体锁定就位。在夹持机构夹紧到安装位置上并且安装臂锁定就位的情况下,uarv将在安装位置处稳固且可释放地安装到物体上。
8.可设想,当安装到物体上时,包含推进器在内的uarv飞行系统可以保持通电并且可以在可以被称为保持模式的模式下操作。在保持模式下,利用安装机构将uarv安装到物体上将在飞行系统仍处于接合状态的同时进行的实用系统操作期间提供额外的稳定性。如果uarv将频繁地从一个安装位置移动到另一个安装位置,则使用这种保持模式可能是令人
期望的,并且对飞行系统进行重复通电和断电可能导致不期望的功率消耗激增或者对在通电与断电之间重复且频繁加速的部件的过度机械磨损。
9.在uarv将保持处于特定安装位置处持续相当长时间的其它情况下,可能令人期望的是,使飞行系统断电以帮助节省能量以及降低噪声和电磁干扰。因此,一旦通过安装机构稳固地安装到物体上,uarv就可以使包含推进器在内的飞行系统断电并进入可以被称为停放模式的模式。
10.可设想,存在许多应用使本发明的uarv处于停放模式,在所述停放模式下,uarv频繁定位在特定安装位置处持续相当长的时间段。作为实例而非限制,这种应用可以包含既定位置,uarv通常将被定位或停放在所述既定位置处以在所述位置处或附近进行树木修剪、修理或维护、通信、监视、安全和/或uarv电源充电。因此,除了使用夹持臂或具有夹持机构的安装臂的uarv的实施例之外,可设想,将存在将对接系统用于处于停放模式的uarv的实施例,其中安装机构包括飞行器底座连接器,其被配置成与附接在物体(如树或电线杆)上的安装位置处的物体对接端口形成可释放耦联连接。在这种实施例中,具有飞行器底座连接器的安装机构可以是唯一的uarv安装机构,或者其可以是一个或多个其它uarv安装机构的补充。
11.在使用对接系统时,在安装位置处、在飞行器底座连接器与物体对接端口之间建立可释放耦联连接。一旦建立了可释放耦联连接,uarv就将在安装位置处稳固地安装在物体上,并且uarv可以使其系统中的一个或多个、包含但不限于所述推进器中的任何推进器断电,并且可以保持安装在所述位置持续延长的时间段。可设想,这种对接系统可以并有一条或多条导电总线,所述导电总线用于在uarv与底座之间传送电力和/或数据。
12.可设想,本发明的uarv可以被配置成用于各种操作,包含但不限于树修剪、修理和维护、监视、安全和防御以及通信。一旦通过安装机构稳固地安装到物体上,uarv就可以通过将推进器以及使uarv保持处于空中所需的任何其它系统断电来节省能量并降低噪音和电磁干扰。
13.可设想,uarv可具有安装在uarv主体上或中、用于执行功能操作的一个或多个系统。作为实例而非限制,这种系统可以包含切割系统、监视系统、武器系统和/或通信系统。在一些所设想实施例中,这种系统被并入到附接到工具臂的工具部件中或被配置成由其利用。在优选实施例中,工具部件可从工具臂拆卸,从而允许不同的工具部件安装在uarv工具臂上以进行不同的操作。在优选实施例中,uarv工具臂是可移动的并且用于将工具部件操纵就位以利用工具部件执行一项或多项实用功能,如例如,利用切割系统修剪树叶、利用修理工具系统执行修理操作、利用监视系统进行监视、使武器系统瞄准和发射或使用通信系统进行通信。
14.在uarv的一些实施例中,可设想,除了用于将uarv安装到物体上使得其可以使其飞行系统断电的安装机构之外,还将存在固定地定位在基本上邻近工具臂的工具部件的位置处或可移动到所述位置的较小工具臂夹持器。可设想,在使用工具部件时,工具臂夹持器能够穿过小空间进行操纵并且将小物体(例如,小树枝和细枝)稳固地夹持和保持就位。在这种实施例中,可设想,uarv可以能够在仍然悬停在空中并且未使用安装机构安装到物体上的同时执行操作。使用工具臂夹持器将提供增强的稳定性。这可以将uarv的有用范围扩展到使用安装机构进行安装不实用或不令人期望的位置。
15.可设想,在uarv的一些实施例中,将并有一个或多个碎片筛网以保护uarv的如推进器等一个或多个部分免受可能由空中运输或执行uarv实用操作而引起的任何碎片或障碍物的影响。
16.可设想,本发明的uarv的实施例可以根据安装在uarv上或中的控制器中含有的预编程指令进行自主操作,或者可以由操作者使用允许操作者近乎实时地控制uarv的远程控制器进行远程操作。
17.设想了用于本发明的uarv的所设想实施例的商业系统,其中用户(即,顾客)通过网络接口(即,互联网连接的计算装置)创建在线账户以获得uarv服务。通过网络接口,用户可以访问本发明的uarv的所有者或操作者的基于云的计算系统,并且通过网络传送用户和账户信息、服务站点位置、期望的服务类型、期望的服务时间表和服务支付信息。支付可由uarv所有者或操作者通过常规支付系统(例如,信用卡、paypal、银行转账等...)进行处理,并且然后顾客服务信息(例如,站点坐标和时间表)可以传送到和/或存储在uarv中。
18.下面将更大地描述本发明的这些和其它特征和方面。
附图说明
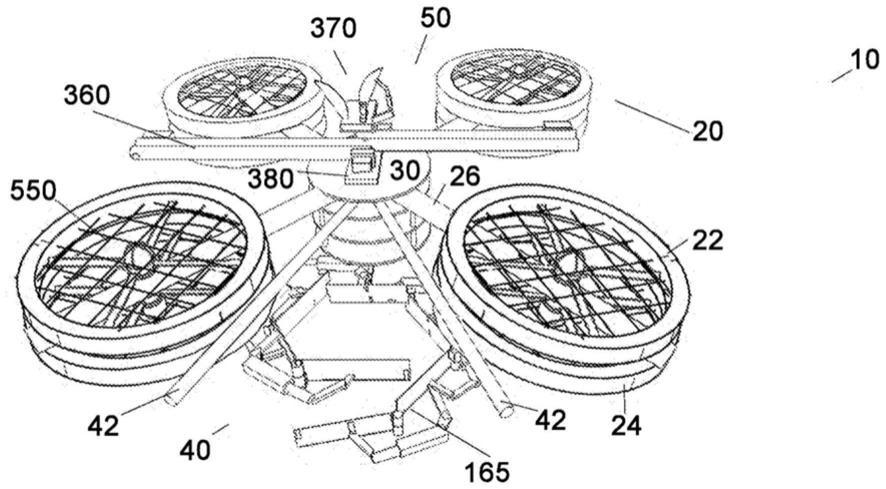
19.图1是本发明的uarv的优选树修剪实施例的立视前透视图,所述uarv具有包括夹持臂的安装机构和处于缩回运输配置的工具臂。
20.图2是本发明的uarv的优选树修剪实施例的立视前透视图,所述uarv具有包括夹持臂的安装机构和处于展开操作配置的工具臂。
21.图3是本发明的处于缩回配置的uarv工具臂的实施例的俯视图。
22.图4是本发明的处于展开配置的uarv工具臂的实施例的俯视图。
23.图5是本发明的安装到圆柱形物体(如,树干)上的uarv的实施例的俯视图,所述uarv具有包括安装臂和夹持机构的uarv安装机构以及处于展开操作配置的uarv工具臂。
24.图6是本uarv发明的处于打开展开配置的多段式夹持臂的立视内侧透视图。
25.图7是本uarv发明的处于缩回闭合配置的多段式夹持臂的立视顶侧透视图。
26.图8是本uarv发明的围绕物体处于缩回闭合配置的多段式夹持臂的立视顶侧透视图。
27.图9是本发明的uarv的立视前透视图,其示出了使用包括夹持臂的安装机构在安装位置处安装到物体上的uarv。
28.图10是本发明的uarv的技术人员实施例的立视前透视图,所述uarv具有安装机构和工具臂,所述安装机构具有带有单个安装夹持机构的安装臂,并且所述工具臂具有所附接的灵巧手工具部件。
29.图11是本发明的uarv的通信实施例的立视右前透视图,所述uarv具有安装臂和工具臂,所述安装臂具有双安装夹持机构,并且所述工具臂具有所附接的通信系统工具部件,其示出了使用所述双安装夹持机构在安装位置处安装到物体上的uarv。
30.图12是用于与本发明的uarv一起使用的远程控制器系统的示例性实施例的示意图。
31.图13a到图13e是使用图12的远程控制器系统对uarv工具臂和工具部件进行的手势控制的图示。
32.图14是与本发明的uarv的用户网络接口系统的示意图。
33.图15是本发明的uarv的战术武器实施例的立视右前前透视图,所述uarv具有带有安装夹持机构的安装臂、飞行器底座连接器和武器系统。
34.图16是用于与本发明的uarv的监视实施例一起使用的对接系统的立视右前透视图。
35.图17是使用具有柱配置的飞行器底座连接器和具有柱套筒配置的物体对接端口的示例性对接系统的立视右前透视图。
36.图18是示例性对接系统的立视左前透视图,示出了图17的飞行器底座连接器,所述飞行器底座连接器在所述柱中具有感应飞行器电力总线线圈并且在所述柱套筒中具有感应物体电力总线线圈。
37.图19是本发明的uarv主体的实施例的正面横截面视图。
38.图20是uarv主体的电池盒区段的立视左前视图,其示出了使用动态平衡系统的本发明实施例中的活动电池支撑件和电池支撑件致动器。
39.图21是本发明的uarv(未示出实用系统)的前视图,其示出了具有动态平衡系统的uarv主体的实施例。
40.图22是具有用于与本发明的uarv一起使用的夹持增强件的液压安装夹持机构的鲨鱼咬合实施例的俯视图。
41.图23是具有作为夹持增强件的可充气膜的安装夹持机构的实施例的立视前侧透视图。
42.图24是本发明的uarv的具有作为可充气膜的夹持增强件的安装夹持机构段的前侧截面视图。
43.图25是具有工具部件的工具臂的右侧视图,所述工具部件具有切割工具和工具臂夹持机构。
44.图26是具有工具部件的工具臂的顶侧视图,所述工具部件具有切割工具和工具臂夹持机构。
45.图27是本发明的uarv的安装夹持机构的超级夹持手实施例的立视左侧示意图。
46.图28是本发明的uarv的与待安装物体接合的安装夹持机构的超级夹持手实施例的立视左侧示意图。
47.图29是本发明的uarv的安装夹持机构的超级夹持s手实施例的立视左侧示意图。
48.图30是与待安装物体接合的本发明的uarv的安装夹持机构的超级夹持s手实施例的立视左侧示意图。
49.图31是安装在物体上的本发明的uarv的安装夹持机构的超级夹持s手实施例的立视左侧示意图。
具体实施方式
50.参照图1,示出了本发明的机器人无人驾驶飞行器(uarv)10的第一优选实施例。在所示实施例中,uarv 10包括全向垂直升降无人机,作为实例而非限制,所述无人机总体上如美国专利3,053,480中所描述和示出的那样进行操作,所述美国专利的内容特此以引用的方式全部并入。在图1所示的实施例中,uarv 10利用八个推进器20,所述推进器各自包括
螺旋桨组合件(即,直升机旋翼)。推进器20通过一个或多个推进器臂26附接到uarv主体30。安装机构40和至少一个实用系统50附接到uarv主体30。
51.在图1的第一优选实施例中,所述八个螺旋桨组合件推进器20优选地如所示那样被布置成背靠背配置,其中上推进器22与下推进器24处于相对的定向。上推进器22和下推进器24被定向和配置成操作以使得其相应推力可以累积。应当注意,用于本发明的推进器的类型、数目、大小、功率和定向可以根据uarv的配置(例如,大小和重量)、操作环境和目的而变化。推进器可以是包含螺旋桨组合件在内的任何装置,所述装置可以单独地或与其它推进器组合地产生足够的升力和/或推力以将uarv从一个位置移动到另一个位置。
52.参照图1和图2,在所示的第一优选实施例中,安装机构40包括附接到uarv主体30的一个或多个多段式安装夹持臂165。参照图6到图8,每个安装夹持臂165包括多个板162,所述板通过板连接器164以阶梯方式活动地连结在一起。在优选实施例中,板162是轻质钛。在每个板连接器164中可以使用钛螺栓、垫圈和螺母。板致动器166连接到每个板162,所述板致动器用于相对于彼此对板162进行定位,从而以阶梯状方式打开(即,展开)和闭合(即,缩回)多段式安装夹持臂165。安装夹持臂165的这种多段式阶梯状配置有利于安装夹持臂165能够在不使板162重叠的情况下稳固地夹持不同大小的物体。还参照图1和图2,可设想,本发明的uarv 10将利用附接到uarv主体30的一个或多个安装引导柱42以帮助促进使用安装机构40将uarv 10安装到如树干或电线杆等圆柱形物体上。
53.参照图9到图11,在其它所设想实施例中,安装机构40包括安装臂60和安装夹持机构70,其中安装臂60可朝着和远离uarv主体30旋转和延伸。在这种实施例中,安装臂60是使用安装臂转台80而附接到uarv主体30的,所述安装臂转台可以由uarv主体30上或中的安装臂马达(未示出)旋转。安装臂转台80可枢转地附接到近侧安装臂部分90。近侧安装臂部分90可枢转地附接到远侧安装臂部分100。安装夹持机构70附接在远侧安装臂部分100的远侧接合部130处。近侧安装臂部分90可以与安装臂转台80绕转台接合部110枢转。远侧安装臂部分100可以与近侧安装臂部分90绕近侧接合部120枢转。安装夹持机构70可以与远侧安装臂部分100绕远侧接合部130枢转。
54.在图9、图10和图11所示的实施例中,安装夹持机构70是多方向且可旋转的抓斗,所述抓斗模拟手和手腕移动,由此使uarv安装臂60能够在安装位置150处抓握到如树干或电线杆等物体140上。安装夹持机构70包括多个优选弓形多段式夹紧钳口160,所述钳钳口可以用于在物体140上的安装位置150处抓住所述物体。可设想,安装夹持机构70可以以作为实例而非限制在以下文献中示出和描述的多种不同方式构造:美国专利申请公开us2005/0135915a1(hall),所述公开中的每一个的内容特此以引用的方式全部并入;美国专利4,993,912,所述专利中的每一个的内容特此以引用的方式全部并入;中国公开专利申请cn 104972460a,所述专利申请中的每一个的内容特此以引用的方式全部并入;中国专利cn 105500362,所述专利中的每一个的内容特此以引用的方式全部并入;《软体且可连续变形的2d机器人操纵系统的设计和控制(design and control of a soft and continuously deformable 2d robotic manipulation system)》(marchese等人,2014年纽约ieee,2014年ieee机器人与自动化国际会议(icra)),所述文献中的每一个的内容特此以引用的方式全部并入;以及《软流弹性体机器人配方(a recipe for soft fluidic elastomer robots)》(marchese等人,《软体机器人(soft robotics)》,第2卷,第1期,2015
年,mary ann liebert,inc.,doi:10.1089/soro.2014.0022),所述文献的内容特此以引用的方式全部并入。
55.参照图27和图28,可设想,在一些实施例中,uarv安装夹持机构70将采用“超级夹持手(super grip hand)”配置的形式。在超级夹持手配置中,附接到机动安装臂60的远端(附接到未示出的uarv主体)的安装夹持机构70包括旋转马达610、夹持马达620、夹持臂630、夹持手640和反转臂650。当安装夹持机构70被操纵成与物体140接触时,夹持马达620将使夹持臂630旋转,直到夹持臂630紧固到物体140上。一旦夹持臂630紧固到物体140上,如通过并入到安装机构70中的一个或多个传感器(例如,扭矩或运动传感器)所检测到的,夹持马达620就使反向旋转臂650旋转直到其也紧固到物体140上(如由一个或多个传感器所检测到的)。一旦夹持臂630和反向旋转臂650紧固到物体140上,uarv就将安装到物体140上。旋转马达610防止旋转力通过安装臂60传递到uarv主体。
56.参照图29到图31,可设想,在一些实施例中,uarv安装夹持机构70将采用“超级夹持s手(super grip s hand)”配置的形式。在超级夹持s手配置中,附接到机动安装臂60的远端(附接到未示出的uarv主体)的安装臂机构70包括旋转马达610、夹持马达620、夹持臂630、夹持手640、致动器670和竖直臂680。当安装夹持机构70被操纵成与物体140接触时,夹持马达620将使夹持臂630旋转,直到夹持臂630紧固到物体140上。一旦夹持臂630紧固到物体140上,如由并入到安装机构70中的一个或多个传感器(例如,扭矩或运动传感器)所检测到的,致动器670就使竖直臂680旋转以便从基本上平行且邻近于所述物体140的定向(例如,竖直)移动到所述物体140后面的基本上垂直(例如,水平)的定向,使得安装夹持机构70更完全地包裹在物体140周围。一旦夹持臂630和竖直臂680紧固到物体140上并围绕所述物体,uarv就将安装到物体140上。旋转马达610防止旋转力通过安装臂60传递到uarv主体。
57.可设想,可以使用通常可用的液压系统、汽油马达和/或电动马达系统来操作安装夹持臂165和安装夹持机构钳口160的致动器。进一步可设想,在本发明的一些实施例中,uarv安装机构40的任何电动马达系统和/或液压系统的电源可以远离uarv定位(例如,在地面上的单元中、在飞行器中或附接到待安装物体),并且这种远程电源将通过系绳电缆可操作地连接到安装机构40,所述系绳电缆具有足够的长度以到达电源的位置与uarv 10的期望安装位置之间。还可设想,在其它实施例中,安装机构40的任何电动马达系统和/或液压系统的电源可以并入到uarv主体30上或中。
58.参照图11,可设想,在一些实施例中,安装臂60可以进一步包括各自终止于补充安装夹持机构190的一个或多个补充远侧安装臂部分200。可设想,每个补充远侧安装臂部分100和每个补充安装夹持机构190将分别具有与相邻且更近侧的远侧安装臂部分100和近侧安装夹持机构70类似的配置。然而,还可设想,在具有多个安装夹持机构的实施例中,可以存在安装夹持机构的配置的变化。在具有多个安装夹持机构的实施例(例如,双安装夹持件实施例、三安装夹持件实施例等)中,可设想,每个连续的补充远侧安装臂部分200将可围绕紧邻的且更近侧的远侧安装臂部分100的远侧接合部130移动。可设想,每个连续的补充安装夹持机构190将可与相关联的补充远侧安装臂部分200一起绕补充接合部210移动。使用一个或多个补充安装夹持机构190可以有助于在uarv10安装到物体140上时提高其稳固性和稳定性。一旦安装夹持机构钳口160就位,就通过向相反安装夹持机构钳口160施加力来将uarv 10安装到安装到物体140上,所述钳口朝向彼此移动,使得所述钳口夹紧在安装位
置150周围。优选地,然后相对于uarv主体30将安装臂60锁定就位。
59.参照图19到图21,本发明的优选实施例利用动态平衡系统,所述动态平衡系统在安装机构和/或实用系统在操作期间移动时转移uarv内部电池的重量以帮助维持uarv的平衡并且最小化用于维持uarv平衡的推进器所消耗的电力。表示uarv 10的重量的很大一部分的内部uarv电池18附接到uarv主体30的电池盒12中的活动电池支撑件720。电池支撑件致动器730附接到活动电池支撑件720,并且可以响应于感测和/或预料到uarv 10的定向或重心变化而移动电池支撑件720和所附接电池18。可设想,致动器730将受一个或多个电子控制器控制,所述电子控制器接收关于uarv 10定向和/或重心的传感器信息,并且可以容纳在uarv主体30中的电子装置隔室16内。因此,举例来说,安装机构40在影响uarv 10的平衡的安装或拆卸操作期间的移动可以被感测到并且可以通过由致动器730实现的电池18移动来进行补偿。
60.可设想,甚至是在使用电池的补偿移动的实施例中,动态平衡系统也可以并有对一个或多个推进器20的推力和/或定向的调节以帮助维持uarv 10的定向和/或使其稳定。可设想,在uarv电池18移动或不移动的情况下,可以彼此独立地控制和调节推进器20的速度和/或方向以实现uarv 10的期望推力、升力、速度和/或定向。进一步可设想,可以将导航和控制系统安装在uarv 10上或中以帮助在安装和其它操作期间自动地使将uarv 10保持处于某个定向或高度或速度。
61.可设想,uarv 10可利用一个或多个接近传感器系统来确定uarv 10与待安装物体140的接近度。这种接近传感器系统将接近警报传送给uarv的操作者以使他们知道uarv 10何时处于使用安装机构将uarv 10安装到物体140上的范围内。
62.可设想,在最初安装物体时,uarv 10可以利用稳固安装测试系统(即,锁定测试),在所述系统中,响应于对来自推进器20的推力的调节而监测uarv 10的移动,所述调节可以是或可以不是预编程的。如果uarv 10的所测量移动处于可以是或可以不是预编程的某个范围内,则生成并传输安装成功信号。响应于所述安装成功信号,uarv 10的操作者或uarv 10的自主控制系统然后可以使飞行系统断电。如果uarv 10的所测量运动不处于令人满意的范围内,从而表明初始安装不稳固,则可以产生安装警报信号。响应于安装警报信号,操作者或uarv 10自主控制系统可以尝试将安装进一步稳固在所述位置处或尝试安装在另一位置处。
63.可设想,在安装到物体上的同时,稳固安装测试系统可以保持活动,使得在检测到uarv 10处于预定范围之外移动的情况下,可以生成并传输安装警报信号。uarv 10可以被预编程为使用一个或多个动作对安装警报系统进行响应,如例如,安全地擦除uarv 10可能含有的任何敏感数据或信息(在盗窃未遂的情况下)和或为飞行系统供电、拆卸以及使用机载卫星(即,gps)导航系统前往预定位置。
64.在安装机构40牢固地固定到安装位置150并且任何安装臂60锁定就位的情况下,uarv 10在安装位置150处稳固地安装到物体140上。一旦通过安装机构40稳固地安装到物体140上,uarv 10就可以预期短暂的安装周期而使飞行系统保持通电并且在保持模式下操作,或者如果预期安装周期延长,则其可以通过对如推进器20等飞行系统进行断电而进入停放模式以节省能量。
65.参照图22、图23和图24,在本发明的优选实施例中,可设想,安装夹持臂165或安装
夹持机构70的一个或多个内部安装夹持表面240具有一个或多个夹持增强件250。在第一示例性实施例中,可设想,夹持增强件250可以包括橡胶或橡胶状夹持垫以增强对物体140的摩擦接触和抓握。在夹持增强件250的第二示例性实施例中,可设想,夹持增强件250可以包括来自内部安装夹持表面240的一个或多个凸出部(例如,一个或多个楔子、齿等...)以增强对物体140的摩擦接触和抓握。这种凸出部可以由任何合适的材料制成,包含但不限于天然或合成橡胶、塑料、金属、陶瓷或木材。在夹持增强件250的第三示例性实施例中,可设想,夹持增强件250可以包括由研磨材料(如砂纸)构成的表面。在第四示例性实施例中,可设想,夹持增强件250可以包括能够通过来自由uarv 10承载的或连接到所述uarv的加压气体供应的气体(例如,空气)进行充气的可充气膜260。
66.可设想,在一些实施例中,安装机构40可以能够实现双重目的:使用夹持机构在某个高度处将uarv10安装到物体上,以及在uarv 10着陆在基本上水平且平坦的表面上时充当uarv的起落架(即,起落装置)。作为实例而非限制,安装机构可以具有由三个或更多个可移动夹持机构钳口构成的夹持机构。因此,在到如树干或电线杆等具有大致圆柱形形状的物体的安装操作期间,可以使用所述夹持机构钳口中彼此相对的两个来抓握物体以将uarv安装到物体上,同时夹持机构的另一额外钳口缩回到某个位置以便不妨碍抓握物体。
67.在uarv到基本上水平且平面的表面(例如,地面、飞行器的平台床、船的甲板等...)上的着陆操作期间,可以操纵所有三个夹持机构钳口并将其打开成着陆器配置,在所述配置中,夹持机构的钳口张开到基本上共面的位置,其中张开的钳口基本上等距离分开。安装机构的安装臂用于将夹持机构定位到基本上处于uarv主体30下方的着陆位置中,使得夹持机构的钳口在处于着陆器配置时将与着陆表面实质接触。在这种配置中,安装机构将充当起落架,所述起落架在uarv推进器断电时将uarv主体30支撑和保持于着陆表面上方。
68.应当注意,带有具有三个钳口的夹持机构的着陆器配置的前述实施例仅仅是示例性实施例。设想了其它配置,其中安装机构可以用作具有带有多个钳口的夹持机构的起落架,所述多个钳口的数目不同于三个钳口的数目(例如,四个钳口、五个钳口等...)和/或对具有还可以(或可以不)在着陆器配置中使用的一个或多个补充夹持机构的安装机构的使用。
69.可设想,本发明的uarv存在大量应用,其中uarv可以频繁地定位在特定安装位置处持续很长的时间段。作为实例而非限制,这种应用可以包含既定位置,uarv将通常保持定位在所述既定位置处以便进行树修剪、修理或维护、通信、监视、安全和/或uarv电源充电。
70.参照图16,设想了用于在停放模式下将uarv 10长期安装在物体140上的对接系统270,其中uarv 10具有安装机构40,所述安装机构包括附接到uarv主体30的飞行器底座连接器280,所述飞行器底座连接器被配置成与附接在物体140(如树或电线杆)上的安装位置150处的物体对接端口290形成可释放耦联连接。可设想,作为实例而非限制,飞行器底座连接器280和物体对接端口290可以像美国专利8,245,370(ritter等人)中所描述和示出的那样进行配置,所述美国专利的内容特此以引用的方式全部并入。进一步可设想,飞行器底座连接器280可以通过可旋转的转台附接到uarv主体30和/或可展开和可缩回以帮助促进连接到对接端口290。飞行器底座连接器280还可以(永久地或可移除地)附接在推进器悬臂26的端部或安装臂60的端部。参照图17和图18,设想了对接系统的实施例,其中飞行器底座连
接器280包括一个或多个飞行器底座连接器套筒690,并且物体对接端口290包括一个或多个物体对接端口柱700。附接到uarv主体30的飞行器底座连接器套筒690可定位在对应物体对接端口柱700上方以在uarv飞行器底座连接器280与物体对接端口290之间、在安装位置处形成可释放耦联连接。然后,uarv将在安装位置处稳固地安装在物体上,并且uarv可以使其系统中的一个或多个、包含但不限于所述推进器中的任何推进器断电,并且可以保持在停放模式下安装在所述位置处持续延长的时段。
71.进一步可设想,本发明的对接系统包含可操作地连接到物体对接端口的电力系统、数据和/或通信部件。作为实例而非限制,可设想,对接系统可以具有一个或多个物体发电站300。将使用对接端口将物体发电站安装在物体上、在所述物体中或以其它方式功能上紧密靠近所述物体。物体发电站300可以例如包括一个或多个太阳能电池板310和/或能量储存装置320,如化学电池(例如,铅酸、锂离子、nimh、镉)、一个或多个电容器、燃料电池等...。可替代地,物体发电站300可以包含连接到高压ac电力线的变电站。可替代地,物体发电站300可以包含风车发电机或水力发电机。可替代地,物体发电站300可以包括(例如,通过电缆的方式)到被定位成远离物体的电源的连接,所述电源例如飞行器电池、电源逆变器或家用电气插座。
72.作为实例而非限制,可设想,对接系统270可以具有一个或多个相关联的物体通信站330。将使用物体对接端口290将物体通信站330安装在物体140上、在所述物体中或者以其它方式在功能上紧密靠近所述物体。物体通信站330可以例如包括一个或多个天线和/或收发器装置,如无线电装置(例如,短波、蜂窝、卫星、am、fm等...)。可设想,物体通信站330可以由物体发电站300供电。可设想,一个或多个数据存储装置将与物体通信站330相关联,使得数据可以由通信站传输、接收和存储。这种数据存储装置可以安装在物体对接端口300上或中。
73.可设想,这种uarv对接系统包含uarv与对接端口之间的一条或多条导电总线和总线连接,其可以用于来往于uarv上的系统传送电力、数据和/或通信。这种导电总线和总线连接可以传导电信号和/或电能、光信号和/或光能或任何其它形式的能量或资料。参照图18,在优选实施例中,飞行器底座连接器套筒690包括连接到uarv 10电源的盘绕式飞行器电力总线710,并且物体对接端口柱700包括连接到提供ac电力的物体发电站的盘绕式物体电力总线712。当飞行器底座连接器套筒690与物体对接端口柱700耦联时,盘绕式飞行器电力总线710变成通过电感应而电连接到物体电力总线712。
74.参照图16,示出了对接系统的实施例,所述对接系统具有全都附接到物体140并且可操作地连接到物体对接端口290的物体通信站330和发电站300,所述发电站并有太阳能电池板340和能量储存装置320。物体通信站330可以用于通过物体对接端口290来往于机载uarv数据和通信系统接收和/或传输数据。安装在uarv主体30上或中的电池可以通过物体对接端口290直接从太阳能电池板340、直接从能量储存装置320或两者的组合接收再充电电力。还可设想,能量可以从安装在uarv 10上的太阳能电池板和/或安装在uarv 10上或中的电池传递到物体对接端口290并且通过所述物体对接端口传递。这种能量可以由附接到物体140的能量储存装置320接收和储存以供附接到物体140的其它部件利用或者以供稍后可能地通过物体对接端口290传递到所连接uarv。
75.参照图1,在本发明的优选实施例中,可以通过使用包括一个或多个安装引导柱42
的安装机构引导系统来促进对安装机构40的操纵。参照图9到图11,还可设想,可以通过使用电子安装机构引导系统350来促进对安装机构40的操纵。作为实例而非限制,安装机构引导系统350可以是将实时视频传输到uarv的远程操作者的相机系统。安装机构引导系统350还可以是机器视觉系统,作为实例而非限制,如在美国专利6,362,875(burkley)中描述和示出的系统,所述专利的内容特此以引用的方式全部并入。
76.参照图1到图5,在本发明的优选实施例中,uarv 10配备有实用系统50,所述实用系统包括工具臂360,所述工具臂用于将至少一个工具部件370操纵就位以执行实用任务。工具臂360可以由碳纤维管构成。第一优选实施例中的工具臂360可以朝着和远离uarv主体30旋转和延伸。在优选实施例中,工具臂360包括工具臂转台380,所述工具臂转台可以由uarv主体30上或中的工具臂电机(未示出)旋转。工具臂转台380可枢转地附接到近侧工具臂部分390,所述近侧工具臂部分可枢转地附接到中间工具臂部分405,所述中间工具臂部分可枢转地附接到远侧工具臂部分400。工具臂伺服402用于移动工具臂部分。近侧工具臂部分390可以与工具臂转台380绕近侧工具臂接合部410枢转。中间工具臂部分405可以绕中间工具臂接合部404和远侧工具臂接合部420枢转。远侧工具臂部分400可以与近侧工具臂部分390绕远侧工具臂接合部420枢转。工具部件370可以与远侧工具臂部分400绕工具部件接合部430枢转。参照图1,在优选的所设想实施例中,当工具臂360未处于用于使用工具部件370执行实用功能的展开操作配置时,可以将所述工具臂放置到缩回运输配置中,在所述缩回运输配置中,所述工具臂处于uarv主体30上方且抵靠所述主体置中的压缩折叠位置中。工具臂360的这种缩回运输配置可以帮助在飞行期间平衡和稳定uarv 10并使其能够在更受限的位置中进行操纵。
77.在优选实施例中,可设想,工具部件370可释放地附接到工具臂360,使得各种不同的工具部件可以与根据待由uarv 10执行的实用功能而与工具臂360一起使用。可设想,在一些实施例中,工具部件可以可释放地连接到工具臂360,作为实例而非限制,如在美国专利4,906,123(weskamp等人)中所描述和示出的那样,所述专利的内容特此以引用的方式全部并入。在uarv 10专用于执行单项实用功能的替代性实施例中,特定工具部件370(例如,切割工具)可以固定地附接到工具臂360。工具部件370可以包括任何类型的一个或多个工具,工具部件的工具集被选择用于待由本发明的uarv10执行的任务。
78.通过示例而非限制的方式,在uarv的树修剪器实施例中,可设想,工具部件370将包括一个或多个切割工具,所述切割工具可以包含可用于修剪uarv 10安装在其上或附近的树的树枝和树叶的机械剪切机、旋转锯片、往复式锯片、链锯等...。参照图2,切割工具部件445的优选实施例使用固定刀片446结合由刀片致动器提供动力的活动刀片447。可设想,uarv的树修剪器实施例与任何类型的树或灌木一起使用,但特别适合于对棕榈树进行周期性(例如,年度)修剪。
79.参照图25和图26,在树修剪器uarv的所设想实施例中,存在切割和飞行(cut-n-fly)工具部件370,所述工具部件包括工具部件夹持机构440,所述夹持机构可以固定地定位在邻近切割工具445的位置处或可移动到所述位置。可设想,工具部件夹持机构440将具有与安装机构夹持件的功能配置类似的功能配置、但是钳口大小比安装机构夹持件钳口的大小更小并且还被线性地成形有平坦内表面,所述平坦内表面可以在至少其长度的一部分上彼此完全接触(类似于尖嘴钳的配置)。在使用工具部件370时,此工具部件夹持配置可以
能够更有效地穿过小空间进行操纵并且夹持较小的树枝和细枝以将它们保持就位。进一步可设想,在这种cut-n-fly实施例中,工具臂360可以并有可移动的平衡配重450以帮助在切割操作期间稳定工具臂360和/或uarv 10。在仅使用工具部件夹持机构440的情况下,在未使用安装机构40将uarv 10安装到物体上的情况下,可设想,uarv推进器20将需要保持动力以在切割操作期间稳定uarv 10并将uarv 10维持就位。
80.在另一个实施例中,可设想,uarv 10被配置为技术人员uarv,并且工具部件370以单独或组合的方式包括一个或多个常规工具,所述工具用于修理或维护操作,作为实例而非限制,如具有一个或多个相关头部的螺丝刀、锤子、扳手、钳子、套筒扳手、烙铁和焊料分配器、电气特性测量工具(即,万用表)、老虎钳、钻机和钻头、美工刀和刀片、焊炬、钥匙、冲压机等...。
81.可设想,技术人员uarv的工具部件370的工具可以是工具部件370的整体部分。可替代地,工具部件可以具有灵巧的手状配置590,其可以自主控制或由操作者远程控制以便抓握、利用、然后释放物品,如可以储存在uarv的可接近工具盒中的个别单独工具。工具部件的这种灵巧的手状配置可以如作为实例而非限制在美国专利6,247,738(winkel等人)中示出和描述的配置一样,所述专利的内容特此以引用的方式全部并入。
82.可设想,使用uarv工具臂360操纵370工具部件以及利用工具元件370可以通过工具臂引导系统460和/或工具部件引导系统促进。作为实例而非限制,工具臂引导系统460和/或工具部件引导系统可以是将实时感觉信息传输到uarv的远程操作者的相机系统。这种感觉信息可以包含视觉信息以及如音频、速度、位置、定向、物理测量和触觉反馈等其它信息。工具臂引导系统460和/或工具部件引导系统还可以是机器视觉系统,作为实例而非限制,如美国专利6,362,875(burkley)中描述和示出的系统,所述专利的内容特此以引用的方式全部并入。
83.参照图16,在本发明的另一个实施例中,uarv 10配置有实用系统,所述实用系统包括能够执行监视操作的监视系统470。在优选实施例中,监视uarv 10的主要部件包括:全向垂直升降直升机无人机,其具有附接到uarv主体30的推进器20;安装机构40,其包括安装臂60,所述安装臂具有附接到uarv主体30的近端和具有安装夹持机构70的远端;以及监视系统470。
84.在监视uarv 10的优选实施例中,监视系统50包括作为安装在uarv主体30上的转台的摄像机系统。监视转台480可以在水平和垂直平面中旋转,从而为监视系统50提供大视野。可设想,监视系统50可以包括可以检测各种信息的传感器系统,包含特殊相机(例如,红外相机)、运动检测器、音频拾取设备、无线电传输接收器等...。
85.在uarv 10的替代性的所设想实施例中,监视系统可以是附接到uarv 10的工具臂360的工具部件370。工具臂360可以用于将监视系统(例如,摄像机)操纵到某个位置以获得更好的视野,包含远离uarv主体30的位置。因此,工具臂360可以可能地改善工具部件监视系统的视野,并且可能地实现对uarv主体30和安装机构的更好隐藏。
86.作为实例而非限制,具有监视系统的uarv可以在黑暗的掩盖下从远程位置发射并且可以通过将uarv安装在树的能够使用监视臂将相机系统从树叶延伸到足够远以获得期望的监视视图的树枝和树叶当中而隐蔽地安装在树上。
87.如视频、音频、传感器测量等监视信息可以由监视系统获取并记录并存储在位于
uarv主体30上或中的存储媒体上。一旦完成监视任务,就可以从树(或其它物体)上卸下监视uarv,并且可以将任何所存储的监视信息返回给所有者/操作者。可替代地,可以使用位于uarv主体30上或中的无线电通信系统同时地或在预定时间将由监视uarv记录的信息传输到远程位置。
88.参照图15,在本发明的另一个实施例中,uarv 10具有实用系统,所述实用系统是能够使一个或多个武器500瞄准和发射的战术武器系统490。在优选实施例中,具有战术武器系统490的uarv包括全向垂直升降直升机无人机,其具有附接到uarv主体30的推进器20;安装机构40,其包括安装臂60,所述安装臂具有附接到uarv主体30的近端和具有安装夹持机构70的远端;以及安装在uarv主体30上的武器系统490。
89.在具有战术武器系统490的uarv的优选实施例中,武器系统490包括附接到武器转台510的枪500,所述武器转台安装在uarv主体30上。武器转台510可以在水平和垂直平面中旋转,从而为武器系统490提供大的目标场。在战术uarv的替代性的所设想实施例中,武器系统可以是附接到活动工具臂的工具部件,如本文其它地方所述。工具臂可以用于将武器系统操纵到某个位置以进行更好的瞄准,包含远离uarv主体30的位置。因此,工具臂可以可能地提供更大的目标场,并且可以可能地实现对uarv主体30和安装机构的更好隐藏。武器系统的武器不限于任何特定类型的武器或弹药并且可以包括用于安全或防御的任何类型的装置,作为实例而非限制,如各种口径的枪支(例如,散弹枪、步枪、大炮等...)、使用非致命弹药的装置(如豆袋、橡胶子弹等...)、分散化学剂(例如,胡椒喷雾或催泪瓦斯)的装置、能量释放武器(例如,激光器)、泰瑟系统、感觉过载武器(例如,光、声等...)、等等。
90.战术uarv的所设想实施例可以悬停在物体上的安装位置附近,这具有针对预期目标利用武器的有利视角,所述目标如树、灯柱或电力或电话电线杆。作为实例而非限制,战术uarv可以在黑暗的掩盖下从远程位置发射并且可以安装在树上、在可能存在敌方目标的区域中。通过将uarv安装在树的能够使用战术臂将武器从树叶延伸到足够远以发射uarv的树枝和树叶当中可以使uarv保持隐藏于敌方目标。
91.参照图11,在本发明的另一个实施例中,uarv 10的实用系统是能够使用一个或多个通信装置530执行通信操作的通信系统520。在优选实施例中,具有通信系统520的uarv 10包括:全向垂直升降直升机无人机,其具有附接到uarv主体30的推进器20;安装机构40,其包括安装臂60,所述安装臂具有附接到uarv主体30的近端和具有安装夹持机构70的远端;以及通信装置530。
92.在具有通信系统520的uarv 10的优选实施例中,通信装置530包括uarv主体30中或上的无线电装置,所述无线电装置具有活动地安装在uarv主体30上的一个或多个无线电天线540。能够将无线电装置操纵并且然后稳固地安装在具有用于传输和接收的更好视线的期望位置处有助于改进通信。在具有通信系统520的uarv的替代性的所设想实施例中,所述系统可以包含附接到活动工具臂的天线工具部件,如本文其它地方所述。附接到活动臂的天线工具部件可以是固定的、活动的或伸缩的。工具臂可以用于将天线工具部件操纵到某个位置以获得更好的传输或接收,包含远离uarv主体30的位置。因此,工具臂可以可能地提供改进的传输和接收,并且可能地实现对uarv主体30和安装机构的更好隐藏。虽然所描述的优选实施例使用无线电波进行通信,但应当注意,本发明不限于无线电通信并且可以使用可以利用电磁频谱(例如,激光或可视觉感知的传输)、声波等的任何部分的其它形式
的发送和接收。
93.具有通信系统520的uarv 10的所设想实施例可以悬停在具有用于接收和传输通信的有利位置的物体140上的安装位置150附近,如在树顶部、塔顶部、建筑物顶部、旗杆顶部、灯柱顶部或电力或电话电线杆顶部。安装臂60将安装夹持机构70的钳口160操纵到安装位置150上和/或周围。一旦安装夹持机构70夹紧到安装位置150上并且安装臂60锁定就位,通信uarv就变得在安装位置处稳固地安装到物体140上。一旦通过安装机构稳固地安装到物体上,uarv就可以通过使飞行系统断电来进入停放模式以节省能量、减少噪音和振动并减少电磁干扰。
94.参照图1和图2,可设想,在uarv的一些实施例中,将结合一个或多个筛网550以保护uarv 10的一个或多个部分、如推进器20免受可能在uarv运输或实用操作期间遇到的任何碎片的影响。作为实例而非限制,这种碎片可以是以下形式:来自正对其执行树修剪操作的树的树叶、在使用武器系统期间弹出的弹壳、从修理或维护操作中掉落的零件或工具。
95.参照图12,可设想,本发明的uarv的实施例可以由操作者使用远程控制器进行远程操作,所述远程控制器允许操作者近乎实时地对uarv的操作进行导航和控制,包含uarv飞行、悬停、安装和拆卸操作以及执行uarv的各种实用功能,如操纵工具部件。
96.作为实例而非限制,可设想,本发明的uarv可以由操作者使用远程控制器进行控制,所述远程控制器包括具有以下各项的系统:控制器模块(例如,计算装置)560;视觉显示装置570,其可操作地连接到所述控制器模块560或与其集成,从而允许操作者接收视觉信息;音频装置572,其可操作地连接到所述控制器模块560或与其集成,从而允许操作者接收音频信息;以及控制机构580,其可操作地连接到所述控制器模块560或与其集成,所述控制机构可以由操作者操纵以远程控制uarv。在所设想实施例中,视觉显示器570、音频装置572和/或控制机构580将可由操作者穿戴(例如,视觉显示器和音频耳机和手套控制器),作为实例而非限制,如以下文献所示:美国专利6,016,385(yee等人),所述专利的内容以引用的方式全部并入;以及美国专利6,128,004(mcdowall等人),所述专利的内容以引用的方式全部并入。参照图13a至13e,在另一个所设想实施例中,远程控制器将能够感测操作者的物理移动和/或表达并将其作为命令传送到远程uarv,如美国专利9,079,313(olivier,iii等人)中所示和所述,所述专利的内容以引用的方式全部并入。图13a示出了手套控制器的实施例,当拇指向前移动时,所述手套控制器使工具臂360展开。图13b示出了手套控制器的实施例,当手套上下移动时,所述手套控制器使工具臂360上下移动。图13c示出了手套控制器的实施例,当手套旋转时,所述手套控制器使工具臂360旋转。图13d示出了手套控制器的实施例,当手套控制器的手指移动时,所述手套控制器激活工具部件370。图13e示出了手套控制器的实施例,当手套左右移动时,所述手套控制器使工具臂360左右移动。
97.可设想,视觉显示器570、音频装置572、控制机构580以及控制器模块560可以集成到同一外壳中,或者视觉显示器570、音频装置572和/或控制机构580可以通过无线电通信574(例如,蓝牙)和/或有线连接576可操作地连接到控制器模块560。
98.参照图14,可设想,期望从本发明的uarv 10接收服务(例如,棕榈树修剪服务)的人(即,顾客)可以与uarv的所有者或操作者创建用户帐户。可设想,人可以通过网络接口800(即,具有对互联网的网络访问的通用计算机系统)创建这种用户帐户,所述网络接口将信息传送到由uarv 10所有者或操作者拥有和/或控制的基于云的计算机系统810(例如,网
络服务器托管的网站)。通过网络接口800,顾客可以向基于云的计算机系统传送用户信息、服务站点位置、期望的服务类型、期望的服务时间表和服务支付信息。支付可以由uarv 10的所有者或操作者通过常规的电子支付系统(例如,信用卡、paypal、银行转账等...)进行处理。一旦支付由uarv 10的所有者或操作者进行了处理,顾客的服务信息(例如,站点坐标、服务类型和时间表)就可以传送到和/或存储在uarv中、优选地通过网络接口传送到uarv 10。
99.可设想,在商业实践中,本发明的多个uarv可以由具有用于运输uarv、将其发射以及将其着陆在给定位置处的专用平台和/或斜坡的车辆(例如,卡车、轮船等...)进行运输。
100.可设想,本发明的uarv的实施例可以使用存储在机载计算系统和用于相同的导航和控制操作的自动驾驶系统中并从根据其执行的预编程指令进行自主操作。
101.以上描述公开了本发明的若干配置和用途。本发明易受配置和用途的修改以及制造方法和设备的改变影响。对于所属领域的技术人员来说,通过考虑本公开或本文公开的本发明实践,这种修改将变得明显。因此,意图是,本发明不限于本文中公开的特定实施例,而是本发明涵盖落入所附权利要求书中所具体化的本发明的真实范围和精神内的所有修改和替代方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1