飞行器系统的制作方法
1.本发明涉及用于飞行器的飞行器系统、涉及在起飞过程期间对飞行器的飞行器系统的控制器进行操作的方法并且涉及飞行器。
背景技术:
2.在许多已知的飞行器中,飞行器的起落架在飞行器位于地面上时被保持处于伸出位置,并且一旦飞行器已经起飞,飞行器的起落架就被收回至收起位置。起落架在收起位置与伸出位置之间的运动通常是由飞行员使用飞行器的驾驶舱控制件、比如起落架杆来控制的。在这些已知的飞行器中的几种飞行器中,起落架舱门在处于关闭位置时部分地或完全地覆盖起落架舱,起落架在处于收起位置时被储存在起落架舱中。起落架和起落架舱门在起飞过程期间引起飞行器阻力,直到起落架和起落架舱门到达它们相应的收起位置和关闭位置为止。
技术实现要素:
3.本发明的第一方面提供了一种用于飞行器的飞行器系统,该飞行器系统包括控制器,该控制器配置成在起飞过程期间基于在控制器判定飞行器的速度等于或大于第一阈值速度时做出的对满足一个发动机不运行条件的判定而在接收使起落架收回的命令之前启动与起落架相关联的起落架舱门从关闭位置朝向打开位置的自动打开。
4.可选地,第一阈值速度小于飞行器的v1。可选地,第一阈值速度等于飞行器的v1。
5.可选地,控制器配置成当该判定在控制器判定飞行器的速度小于或等于第二阈值速度时发生时,基于该判定而启动起落架舱门的自动打开,并且在满足一个发动机不运行条件的判定在飞行器的速度大于第二阈值速度时发生时禁止起落架舱门的自动打开。
6.可选地,第二阈值速度大于飞行器的v1。
7.可选地,基于下述各者中的一者或更多者来确定第二阈值速度:飞行器的起飞重量、飞行器的类型、飞行器的配置、能够由飞行器生成的推力、跑道形貌以及环境条件。
8.可选地,第二阈值速度小于飞行器的升空速度。
9.可选地,控制器配置成使得仅当满足一个发动机不运行条件的判定在飞行器的速度等于或大于第一阈值速度时发生时,启动起落架舱门的自动打开。
10.可选地,控制器配置成使得仅在满足一个发动机不运行条件的判定在飞行器的速度小于或等于第二阈值速度时发生时,才启动起落架舱门的自动打开。
11.可选地,控制器配置成当判定发生在决定时段内时,基于该判定而启动起落架舱门的自动打开,决定时段在控制器判定飞行器的速度等于第一阈值速度时开始,并且控制器配置成在满足一个发动机不运行条件的判定在决定时段已经过去之后才发生时禁止起落架舱门的自动打开
12.可选地,决定时段的持续时间基于下述各者中的一者或更多者来确定:飞行器的起飞重量、飞行器的类型、飞行器的配置、能够由飞行器生成的推力、飞行器的v1、升空速
度、地面速度、加速度、跑道形貌以及环境条件。
13.可选地,控制器配置成判定飞行器的升空已经发生。
14.可选地,控制器配置成在满足一个发动机不运行条件的判定在控制器判定飞行器的升空已经发生之后才发生时禁止起落架舱门的自动打开。
15.可选地,控制器配置成使得控制器仅在控制器判定飞行器的升空已经发生时才启动起落架舱门的自动打开。
16.可选地,在控制器启动起落架舱门的自动打开的情况下,由控制器在从控制器判定飞行器的升空已经发生起的预定时间内启动自动打开。
17.可选地,预定时间基于起落架舱门在控制器启动自动打开之后从关闭位置移动至打开位置所花费的时间。
18.可选地,控制器配置成接收对飞行器中包括的两个或更多个发动机的发动机速度进行指示的输入信号,并且基于两个或更多个的发动机速度之间的差来判定满足一个发动机不运行条件。
19.可选地,飞行器系统包括起落架、起落架舱门和起落架伸出和收回系统,该起落架伸出和收回系统配置成使起落架伸出和收回并且使起落架舱门打开和关闭。
20.本发明的第二方面提供了一种用于飞行器的飞行器系统,该飞行器系统包括控制器,该控制器配置成在起飞过程期间基于在预定时段内做出的对满足一个发动机不运行条件的判定而在接收使起落架收回的命令之前启动与起落架相关联的起落架舱门从关闭位置朝向打开位置的自动打开,预定时段在起飞过程期间。
21.可选地,飞行器系统包括上面参考本发明的第一方面所描述的特征中的任何特征。
22.本发明的第三方面提供了一种在起飞过程期间对飞行器的飞行器系统的控制器进行操作的方法。该方法包括:控制器对满足一个发动机不运行条件进行判定,并且控制器基于在控制器判定飞行器的速度等于或大于第一阈值速度时做出的满足一个发动机不运行条件的判定而在接收使起落架收回的命令之前启动与起落架相关联的起落架舱门从关闭位置朝向打开位置的自动打开。
23.可选地,该方法包括在控制器判定飞行器的速度小于或等于第二阈值速度时做出判定时,控制器基于该判定来启动起落架舱门的自动打开,其中,第二阈值速度大于飞行器的v1,并且控制器在飞行器的速度大于第二阈值速度时做出的一个发动机不运行条件的判定时禁止起落架舱门的自动打开。
24.可选地,该方法包括在决定时段内做出判定时,控制器基于该判定来启动起落架舱门的自动打开,决定时段在控制器判定飞行器的速度等于第一阈值速度时开始,并且控制器在决定时段过去之后才做出一个发动机不运行条件的判定时禁止起落架舱门的自动打开。
25.本发明的第四方面提供了一种非暂态性计算机可读存储介质,所述非暂态性计算机可读存储介质存储下述指令:所述指令在由飞行器的飞行器系统的控制器执行的情况下使控制器执行根据本发明的第三方面所述的方法。
26.本发明的第五方面提供了一种飞行器,该飞行器包括根据本发明的第一方面或第二方面的飞行器系统,或者包括根据本发明的第四方面的非暂态性计算机可读存储介质。
附图说明
27.现在将参照附图仅通过示例的方式描述本发明的实施方式,在附图中:
28.图1示出了在不同起飞场景中的起飞过程期间的飞行器轨迹的示意图;
29.图2示出了飞行器系统的示例的示意图;
30.图3示出了在起飞过程期间飞行器轨迹的图形表示;
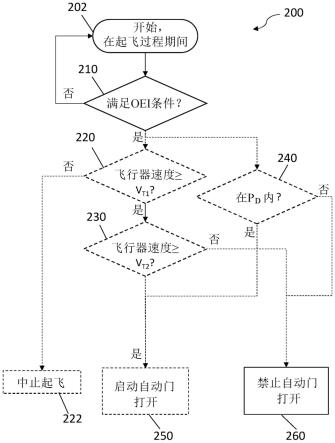
31.图4示出了流程图,其示出了在起飞过程期间对飞行器的飞行器系统的控制器进行操作的方法的示例;
32.图5示出了非暂态性计算机可读存储介质的示例的示意图;以及
33.图6示出了飞行器的示例的示意性正视图。
具体实施方式
34.如上所述,在一些已知的飞行器中,起落架在飞行器位于地面上时被保持处于伸出位置,并且一旦飞行器已经起飞,起落架就收起在起落架舱中处于收起位置。起落架的这种收起有助于减小飞行器阻力和噪声以及起落架在飞行中被损坏的风险。随后,起落架在飞行器着陆之前再次伸出至伸出位置。起落架舱门可以在关闭时至少部分地覆盖起落架舱,并且起落架舱门能够打开以使得起落架能够在收起位置与伸出位置之间移动。起落架和起落架舱门的运动通常由飞行员使用飞行器的驾驶舱飞行控制件、比如起落架控制杆来控制。
35.起飞过程是对于飞行机组人员而言的最高工作负荷的飞行阶段之一。起落架在升空后的收回是在飞行机组人员于该时间段期间执行的许多行动中。在起飞过程期间,飞行员通常将在确认飞行器爬升速率为正时手动地启动起落架收回过程。通常由飞行员或飞行机组人员的另一成员通过驾驶舱的窗户进行查看来检查飞行器从地面上升或对用于高度增加的高度仪或竖直速度指示器进行检查来确认正爬升速率。这种确认通常在升空时发生或升空后前三秒钟处发生。
36.如果在飞行器的发动机中发生故障或错误(通常称为“一个发动机不运行”或“oei”状况),则起飞过程期间的工作负荷可能增加。尽管飞行器将被设计成使得其余发动机可以生成足够的推力以使飞行器在空中具有可接受的安全余量,但是由飞行器生成或能够生成的总推力中仍然会减少,这意味着与“所有发动机可运行”、或“aeo”状况相比,由起落架引起的阻力对飞行器性能具有更大比例影响。
37.本文中讨论的一些示例涉及在oei状况下在升空后使飞行器的起落架收回所花费的时间减少。特别地,一些示例涉及确定oei状况已经发生并基于oei情况已经发生来确定是否自动打开与起落架相关的起落架舱门。自动打开起落架舱门能够使飞行器爬升速率在起飞过程期间更早增加,或者使飞行器更快地到达给定的高度。这是因为起落架在接收使起落架收回的命令之后更快收回。这种情况和其他优点是可以实现的,同时保持了用于使起落架收回的权限可以属于飞行员或飞行机组人员中的另一飞行成员。
38.本文中所论述的技术至少在民用飞行器、军用飞行器和无人飞行器(uav)中有所应用。当只有一个飞行机组人员或根本没有飞行机组人员时,本文中所论述的一些示例能够在这些应用领域内实现。本文中讨论的飞行器的发动机可以是用于生成推力的任何类型的飞行器发动机、比如燃气涡轮发动机、电动马达或活塞发动机。
39.图1示出了在起飞场景s1、s2和s3中的起飞过程期间飞行器轨迹的图形表示。起飞过程是在飞行器在跑道上开始起飞加速与飞行器在升空之后到达加速高度之间被执行的过程。在s1中,起飞过程在aeo的情况下发生,并且起落架舱门响应于在控制器处接收使相关起落架收回的命令而打开。在s2中,起飞过程在oei的情况下发生,并且起落架舱门响应于接收使起落架收回的命令而再次打开。在s3中,起飞过程在oei的情况下发生,但是起落架舱门在控制器接收使起落架收回的命令之前打开。
40.图1示出了与s2和s3相比,在s1中实现更高的飞行器爬升速率。这是因为,如讨论的,与aeo状况相比,在oei状况下能够产生较少的推力。图1还示出了与响应于接收使起落架收回的命令而打开起落架舱门(如在s2中)相比,在接收使起落架收回的命令之前打开起落架舱门(如在s3中)可以有助于飞行器在oei状况中更快地到达给定高度。这是因为,在s3中,在控制器处接收使起落架收回的命令时,起落架的收回可以更快地开始,因为起落架舱门将部分或完全打开。图1还示出了与s2相比,s3中的初始爬升阶段的飞行器爬升速率的略微减小。这是由于与s3中相比,在s3中的起飞过程中,通过在更早时刻打开起落架舱门而引起的额外阻力。然而,这更多通过起落架在起飞过程中的相对更早时刻处到达收起位置的性能优点而被弥补,使得实现了更大的最终爬升速率。
41.图2示出了根据示例的用于飞行器的飞行器系统100的示意图。系统100包括控制器110和起落架伸出和收回系统(lgers)120。lgers 120包括起落架舱门130和起落架140。在其他示例中,可以从飞行器系统100中省略起落架伸出和收回系统120、起落架舱门130和起落架140中的一者或更多者。也就是说,它们可以例如包括在与系统100相互作用的一个或更多个其他系统中。起落架舱门130是起落架舱的用于容纳起落架140的门。在由控制器110接收使起落架140伸出或收回的命令之后,通过控制器110使lgers 120伸出或收回起落架140。在收起位置中,起落架140定位起落架舱中。当起落架舱门130处于关闭位置时,起落架舱的开口被起落架舱门130至少部分地覆盖或阻挡,并且当起落架舱门130从关闭位置移动至打开位置时,起落架舱的开口没有被起落架舱门130覆盖。与起落架舱门130处于打开位置时相比,当起落架舱门130处于关闭位置处时,开口的覆盖程度更大。起落架伸出和收回系统120构造成使起落架140伸出和收回以及使起落架舱门130打开和关闭。
42.图3示出了场景s3中示例飞行器轨迹的图形表示(如参照图1所限定)。如下面将更详细描述的,参考沿着跑道或相对于跑道(图3的x轴线)的距离示出了在场景s3期间由飞行器实现的各种速度,在起飞过程中发生各种速度。例如,图3示出了飞行器的v1(可以安全启动中断起飞的最大速度)在飞行器于跑道上时获得,飞行器的v
lof
(飞行器的升空速度)在飞行器的v1之后并且在升空已经发生时获得,并且飞行器的v2(在飞行器的v1之后在oei状况的情况下,维持直到加速高度的最小速度)在初始爬升阶段获得。
43.参见图2和图3,控制器110配置成在起飞过程期间在接收使起落架140收回的命令之前,启动起落架舱门130从关闭位置朝向打开位置的自动打开。在该示例中,在控制器110启动起落架舱门130的自动打开之前,执行起落架舱门130的预先准备(例如,将lger 120加压并且将起落架舱门130解锁)以备用于起落架舱门130的自动打开,例如在图3中所指示的场景s3期间的时刻处。基于下述判定来启动自动打开:在由控制器确定飞行器的速度为等于或大于第一阈值速度v
t1
时进行该判定,判定满足oei条件。满足oei条件的判定可以以本领域技术人员已知的许多合适方式来实现,并且下面讨论一些示例性方式。在该示例中,飞
行器的速度是地面速度,但在其他示例中,飞行器的速度是空中速度。
44.在该示例中,第一阈值速度v
t1
小于飞行器的v1。在一些其他示例中,第一阈值速度v
t1
等于飞行器的v1。在一些示例中,第一阈值速度v
t1
是飞行器在达到飞行器的v1之前的特定时间处的速度,比如飞行器在达到飞行器的v1之前一秒的速度。在一些示例中,当满足oei条件的判定在飞行器的速度达到第一阈值速度v
t1
之前发生,起飞过程中止。
45.在该示例中,控制器110配置成基于下述判定来启动起落架舱门130的自动打开:该判定在由控制器确定的飞行器的速度小于或等于第二阈值速度v
t2
时发生。在该示例中,第二阈值速度v
t2
大于飞行器的v1。控制器110还配置成当满足oei条件的判定在飞行器的速度大于第二阈值速度v
t2
发生时,禁止起落架舱门130的自动打开。
46.判定在飞行器的速度大于v
t2
时满足oei条件可能意味着该飞行器具有足够的推力以完成起飞过程,而不需要自动打开起落架舱门130。在一个示例中,第二阈值速度v
t2
小于飞行器的升空速度v
lof
。在另一示例中,第二阈值速度v
t2
可以等于飞行器的升空速度v
lof
。在又一示例中,第二阈值速度v
t2
可以大于飞行器的升空速度v
lof
。
47.通过设定第一阈值速度v
t1
和第二阈值速度v
t2
,限定了检测速度窗口vd。在该示例中,如果满足oei条件的判定在飞行器处于检测速度窗口vd内的速度发生时,控制器110将在起飞过程期间的预定的时间处启动起落架舱门130的自动打开(将如下所述)。检测速度窗口vd限定飞行器速度范围,在该飞行器速度范围内,如果在飞行器处于限定的速度范围内的速度时判定已经发生了oei,则起落架舱门130的后续自动打开将有助于通过减少使起落架收回的时间来增加飞行器爬升速率、或允许飞行器更快达到给定高度。在该示例中,如果满足oei条件的判定在飞行器处于检测速度窗口vd之外的速度发生时,则控制器110将禁止起落架舱门130的自动打开。在该示例中,如果满足oei条件的判定在飞行器速度低于限定范围时进行,则起飞过程中止,但是在其他示例中不必如此。类似地,在该示例中,如果在飞行器速度高于限定范围时进行oei条件判定,则该飞行器被认为具有足够的推力以完成起飞过程而不需要随后自动打开起落架舱门130。
48.在一些示例中,第二阈值速度v
t2
基于下述各者中的一者或更多者来确定:飞行器的起飞重量、飞行器的类型、飞行器的配置、能够由飞行器生成的推力、跑道形貌以及环境条件。这些变量中的每个变量可能影响飞行器在起飞过程期间的加速度和升空速度v
lof
,因此可以在设定第二阈值速度v
t2
时考虑这些变量中的每个变量。在一些示例中,飞行器系统100配置成从一个或更多个单独的飞行器系统102(其中,一个飞行器系统在图2中以虚线示出)接收对上述变量中的一者或更多者进行指示的信号。
49.在一些示例中,第二阈值速度v
t2
是与飞行器的v1相关的速度。例如,第二阈值速度v
t2
与飞行器的v1成比例地相关,比如比飞行器的v1大特定百分比或是飞行器的v1的倍数。替代性地,第二阈值速度v
t2
可以是下述速度:该速度是比飞行器的v1大的固定量,例如不论飞行器的v1的大小如何,该速度比飞行器的v1大10节。
50.在该示例中,控制器110配置成确定飞行器的速度并将飞行器的速度与第一阈值速度v
t1
和第二阈值速度v
t2
中的一者或两者进行比较。在一些示例中,控制器110基于比较的结果来启动起落架舱门130的自动打开。在另一示例中,控制器110配置成从单独的飞行器系统、比如上面提到的单独的飞行器系统102接收对飞行器的速度进行指示的信号,并且控制器110配置成将飞行器的速度与第一阈值速度v
t1
和第二阈值速度v
t2
中的一者或两者
进行比较。在一些示例中,控制器110配置成基于飞行器的速度与第一阈值速度v
t1
和第二阈值速度v
t2
中的一者或两者之间的比较来启动起落架舱门130的自动打开。在另一示例中,控制器110配置成接收对飞行器的速度与第一阈值速度v
t1
和第二阈值速度v
t2
中的一者或两者之间的差进行指示的信号,并且配置成基于所接收的信号来启动起落架舱门130的自动打开。
51.在该示例中,控制器110配置成使得仅在判定满足oei条件在飞行器的速度等于或大于第一阈值速度v
t1
且小于或等于第二阈值速度v
t2
发生时,才启动起落架舱门130的自动打开。也就是说,仅在判定满足oei条件在飞行器的检测速度处于检测速度窗口vd内发生时,才由控制器110启动起落架舱门130的自动打开。在其他示例中,控制器110还配置成在其他场景中启动起落架舱门的自动打开。
52.图3示出了被示出为阴影框的决定时段pd。当控制器判定飞行器的速度等于第一阈值速度v
t1
并且在控制器判定飞行器的速度等于v
t1
之后经过一预定时间后,决定时段pd开始。
53.在图2中所示的飞行器系统100的另一示例中,控制器110配置成基于判定在决定时段pd内发生的判定来启动起落架舱门130的自动打开,而不是在先前描述示例中的那样,基于检测速度窗口vd由控制器110来启动自动打开。在该示例中,控制器110还配置成在判定满足oei条件在决定时段pd已经过去之后发生时禁止起落架舱门130的自动打开。如图3中所示,在飞行器的升空已经发生后,决定时段pd过去。在其他示例中,在飞行器的升空之前或在飞行器的升空时,决定时段pd就过去了。在一些示例中,仅在判定满足oei条件在决定时段pd期间发生时,才由控制器110启动起落架舱门130的自动打开。在其他示例中,控制器110还配置成在其他场景中启动起落架舱门的自动打开。
54.在一些示例中,决定时段pd的持续时间基于下述各者中的一者或更多者来确定:飞行器的起飞重量、飞行器的类型、飞行器的配置、能够由飞行器生成的推力、飞行器的v1、飞行器的升空速度v
lof
、地面速度、加速度、跑道形貌以及环境条件。这些变量中的每个变量可能会影响飞行器在起飞过程期间的加速度,并且因此可以在设定决定时段pd时考虑这些变量中的每个变量。在一些示例中,飞行器系统100配置成从单独飞行器系统、比如上面讨论的单独飞行器系统102接收对上述变量中的一者或更多者进行指示的信号。
55.在一些示例中,控制器110配置成判定飞行器的升空已经发生。在一些示例中,控制器110还配置成在判定满足oei条件在控制器判定在飞行器的升空已经发生之后发生时,禁止起落架舱门130的自动打开。例如,当判定满足oei条件在在升空之后发生时,飞行器可以具有足够的推力以执行起飞过程,而不需要与本文中所述的系统相关的优点。在一些示例中,其中,控制器110基于是否在速度检测窗口vd内确定oei条件而启动自动打开,第二阈值速度是飞行器在飞行器的升空v
lof
处的速度。在一些示例中,其中,控制器110基于是否在检测时段pd期间确定oei条件并且检测时段pd在升空的时刻尚未过去而启动自动打开,控制器110配置成禁止起落架舱门130的自动打开,即使在判定满足oei条件在检测时段pd的剩余期间发生时也是如此。也就是说,升空已经发生的检测可以优先于检测时段pd。
56.在一些示例中,控制器110配置成使得仅当控制器110判定飞行器的升空已经发生时,才由控制器110启动起落架舱门130的自动打开。这可以确保一旦飞行器在飞行中,起落架舱门130才打开。可能有益的是,将起落架舱门130在升空前保持处于关闭位置,以防止例
如来自跑道的碎屑进入起落架舱并且可能损坏起落架舱。
57.在一些示例中,判定升空已经发生是基于下述各者中的一者或更多者:飞行器速度、飞行器高度、轮上的重量、轮速度、起落架支柱长度、飞行器旋转和飞行器角度。在一些示例中,控制器110配置成从单独的飞行器系统、比如单独的飞行器系统102接收对上述变量中的一者或更多者进行指示的信号。在其他示例中,控制器110配置成接收对升空已经发生进行指示的信号。
58.在一些示例中,在控制器110启动起落架舱门130的自动打开的情况下,控制器110在从控制器判定飞行器的升空已经发生起的预定时间p
lof
(如图3中所示)内启动自动打开。这可以确保起落架舱门130在控制器110接收使起落架140收回的命令时处于打开位置、或者至少处于关闭位置与打开位置之间,使得与起落架舱门130在控制器110接收使起落架140收回的命令时处于关闭位置相比,起落架更早地到达收起位置。
59.在一些示例中,预定时间p
lof
是基于起落架舱门130在控制器110启动自动打开之后从关闭位置移动至打开位置所花费的时间。在一些示例中,从升空起的预定时间p
lof
基于从升空起的由控制器110接收使起落架140收回的命令的平均时间。例如,该命令通常可以在升空后平均三秒被接收,并且起落架舱门130可能花费2.5秒从关闭位置移动至打开位置,因此从升空起的预定时间p
lof
可以是0.5秒,使得起落架舱门在升空后三秒处于打开位置。
60.一个发动机不运行(oei)条件可以以本领域技术人员已知的任何合适的方式进行检测。例如,控制器110配置成接收对飞行器中包括的两个或更多个发动机的发动机速度进行指示的输入信号,并且基于两个或更多个发动机的发动机速度之间的差来判定满足oei条件。在其他示例中,控制器110在飞行器发动机的发动机速度之间的差超过差阈值预定时间段时判定满足oei条件。
61.在其他示例中,控制器110配置成基于下述各者中的一者或更多者来判定满足一个发动机不运行条件:指示发动机油温度的信号;指示发动机油压力的信号;指示发动机振动的信号;指示发动机推力的信号;指示排气温度的信号;指示发动机压力比的信号;以及指示在起飞过程期间的飞行器加速度的信号。
62.在示例中,用于飞行器的飞行器系统包括控制器、比如图1中所示的控制器110,并且控制器配置成在起飞过程期间基于在预定时段内进行的对满足一个发动机不运行条件的判定而在接收使起落架收回的命令之前启动与起落架相关联的起落架舱门从关闭位置朝向打开位置的自动打开,预定时段在起飞过程期间。
63.在示例中,预定时段是如图3中所示的决定时段pd,并且预定时段在由控制器110确定飞行器的速度等于第一阈值速度v
t1
时开始。在其他示例中,预定时段基于下述各者中的一者或更多者而开始;飞行器沿着跑道到达位置、飞行器达到飞行器的速度v1、以及飞行器达到预定的加速度。在示例中,预定时段在控制器判定飞行器的升空已经发生时过去。在其他示例中,预定时段的持续时间基于下述各者中的一者或更多者;飞行器的起飞重量、飞行器的类型、飞行器的配置、飞行器的速度、能够通过飞行器生成的推力、跑道形貌以及环境条件。
64.现在将描述在起飞过程期间对飞行器的飞行器系统的控制器进行操作的方法。飞行器系统可以是上述任何飞行器系统,比如图1中所图示的飞行器系统100。控制器可以是
如上面给出的示例中的任何示例中所述的控制器110。图4示出了根据各个示例示出的方法200的流程图。在其他示例中,可以省略所图示的方法200的一个或更多个部分。
65.方法200在飞行器的起飞过程期间、例如在沿着跑道的加速度开始时开始(如开始框202中所示)。
66.方法200包括控制器判定满足oei条件(如判定框210中所示)。在该示例中,当判定框210的结果为肯定时,控制器进行下述判定:关于判定满足oei条件是否在控制器判定飞行器的速度等于或大于第一阈值v
t1
时做出(如在判定框220中所示)。在该示例中,第一阈值速度v
t1
小于飞行器的v1。在其他示例中,第一阈值速度v
t1
等于飞行器的v1。在该示例中,当判定框220的结果为否定时,起飞过程中止(如动作框222中所示),并且方法200结束。在其他示例中,当判定框220的结果为否定时,采取不同的动作。
67.在该示例中,当判定框220的结果为肯定时,控制器进行下述判定:关于判定满足oei条件是否在控制器判定飞行器的速度小于或等于第二阈值v
t2
时做出(如在判定框230中所示)。在该示例中,第二阈值速度大于第一阈值速度v
t1
并且大于飞行器的v1。在该示例中,当判定框230的结果为否定时,方法200包括控制器禁止起落架舱门的自动打开(如动作框260中所示)。替代性地,当判定框230的结果为肯定时,方法200包括控制器在接收使起落架收回的命令之前启动与起落架相关联的起落架舱门从关闭位置朝向打开位置的自动打开(如动作框250中所示)。
68.在替代示例中,省略框220、222和230,并且当判定框210的结果为肯定时,控制器进行下述判定:判定满足oei条件是否在决定时段pd(如判定框240中所示)内做出。在一个这种示例中,决定时段pd在控制器判定飞行器的速度等于第一阈值速度v
t1
时开始。在该示例中,当判定框240的结果是肯定时,方法200包括控制器在接收使起落架收回的命令之前启动与起落架相关联的起落架舱门从关闭位置朝向打开位置的自动打开(如动作框250所示)。当判定框240的结果为否定时,使得判定满足oei条件在决定时段pd之外做出,该方法200包括控制器禁止起落架舱门的自动打开(如动作框260中所示的)。
69.图5示出了根据示例的非暂态性计算机可读存储介质300的示意图。非暂态性计算机可读存储介质300存储下述指令330:所述指令330在由控制器310的处理器320执行的情况下使处理器320执行根据示例的方法。在一些示例中,控制器310是如上参照图1的控制器110或本文中所讨论的控制器110的任何变型。指令330包括:判定332满足oei条件,并且然后基于在飞行器的速度等于或大于第一阈值速度v
t1
时进行判定的满足oei条件的判定,而在收到使起落架收回的命令之前启动334起落架舱的自动打开。在其他示例中,指令330包括执行本文中描述的任何其他示例方法、比如以上参照图4所描述的方法200中的一者的指令。
70.图6示出了根据示例的飞行器400的示意图。在该示例中,飞行器400包括两个主起落架410和机头起落架420,以及各自与相应的起落架410、420相关联的起落架舱门(现在示出)。飞行器400还包括上面参照图5讨论的非暂态性计算机可读存储介质300(未示出)。飞行器400还包括飞行器系统(未示出),比如上面参照图2的示例中的任何示例中所述的飞行器系统100。在该示例中,飞行器系统100包括多个起落架伸出和收回系统120,每个起落架伸出和收回系统120与飞行器400的相应起落架410、420相关联。飞行器400还具有驾驶舱430,来自驾驶舱430的使起落架收回的命令由飞行器系统100的控制器110接收,如以上所
述的。
71.要注意的是,除非另有明确说明,否则本文所使用的术语“或”应解释为意指“和/或”。
72.以上实施方式应当被理解为如何可以实现本发明及本发明的各方面的非限制性的说明性示例。设想了本发明的其他示例。应当理解的是,关于任何一个示例描述的任何特征可以单独使用或者与所描述的其他特征组合使用,并且还可以与任何其他示例或者任何其他示例的任何组合的一个或更多个特征组合使用。此外,在不背离所附权利要求中限定的本发明的范围的情况下,还可以采用上面未描述的等同方案和改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1