姿态可控模块单元、飞行器及姿态控制方法
1.本发明涉及姿态可控装置及飞行器,具体涉及姿态可控模块单元、飞行器及姿态控制方法,属于飞行器技术领域。
背景技术:
2.传统飞行器在垂直起降阶段时多依靠发动机的推力差实现姿态的控制,而部分发动机如涡喷发动机的推力响应速度无法满足飞行器的位姿控制需求;螺旋桨能量密度低,且体积大,布置于机身外围,而常用的涡喷发动机尾喷管旋转范围小,如若旋转发动机会破坏机身流线型。
技术实现要素:
3.本发明为克服现有技术不足,提供一种姿态可控模块单元、飞行器及姿态控制方法。
4.姿态可控模块单元包含喷气推力装置、方向调控装置、弯管和机架;喷气推力装置安装在机架上,弯管与喷气推力装置的喷气口相连,气流可沿弯管喷出,弯管可由设置在机架上的方向调控装置驱动,弯管可绕与喷气口对接的端面轴线旋转。
5.飞行器包含机体和四个姿态可控模块单元;四个姿态可控模块单元阵列布置在机体上,每个姿态可控模块单元的机架固定在机体上。
6.姿态控制方法包含:俯仰运动控制:控制方向调控装置使得第一弯管和第二弯管同时向前或向后偏转,控制方向调控装置使得第三弯管和第四弯管出口向下,此时第三弯管和第四弯管沿z轴上的力为f3和f4,第一弯管和第二弯管沿z轴上的力为f21,f1=f2=f3=f4>f21,所以合力产生一个低头力矩,飞行器低头;同理当控制方向调控装置使得第三弯管和第四弯管同时向前或后偏转时,合力会产生抬头力矩,飞行器抬头,实现俯仰运动;
7.横滚运动控制:控制方向调控装置使得第一弯管和第四弯管分别向两侧偏转,此时第一弯管和第四弯管沿z轴上的力为f11和f41,控制方向调控装置使得第二弯管和第三弯管的出口向下,此时第二弯管和第三弯管沿z轴上的力为f2和f3,f2=f3>f11>f41,合力产生一个左滚翻力矩,飞行器向左滚转;同理当控制方向调控装置使得第二弯管和第三弯管分别向两侧偏转时,控制方向调控装置使得第一弯管和第四弯管的出口向下,合力会产生右滚翻力矩,飞行器向右滚转,实现横滚运动;
8.偏航运动控制:控制方向调控装置使得第一弯管和第四弯管同时向后偏转,控制方向调控装置使得第二弯管和第三弯管同时向前偏转时,其合力产生一个左偏航力矩,飞行器向左偏航;同理当控制方向调控装置使得第一弯管和第四个弯管同时向前偏转,控制方向调控装置使得第二弯管和第三弯管同时向后偏转时,其合力会产生右偏航力矩,飞行器向右偏航,实现偏航运动。
9.本发明相比现有技术的有益效果是:
10.本发明的姿态可控模块单元为一维矢量结构,对力的方向调节最高可实现不超过
180
°
的范围调节,调节范围较大;一维矢量姿态可控模块单元可降低对发动机推力调节速度的依赖,可以使发动机转速固定;一维矢量姿态可控模块单元的弯管外露,降低了对驱动的需求,同时只有弯管露在机身外侧,不会破坏机身的流线型。一维矢量姿态可控模块单元搭配固定翼机身可以完成垂直起降、过渡转快速平飞,既可以拥有普通旋翼飞机的快速机动能力,也拥有高速巡航的能力,同时体积小负载大续航能力强。
11.飞行器中,经过弯管后喷气推力装置产生的高速气流被迫发生转向,而通过控制弯管的旋转方向可以控制弯管产生推力的大小和方向,四个姿态可控模块单元的推力相同且固定不变,经过弯管后,四个姿态可控模块单元产生的力大小相同,方向不同,利用此原理设计出飞行器及相应的控制策略。设计的飞行器的喷气动力包括但不限于涡喷、涵道风扇等,飞行器形式包括但不限于垂直起降机、垂直起降固定翼等。
12.飞行器姿态控制方法可以通过控制俯仰、偏航、横滚三个姿态以及竖直方向的四个自由度实现飞行器的稳定的位姿控制,当飞行器在竖直方向上进行运动时,仅需控制四个一维矢量的姿态可控模块单元的弯管推力和,控制四个弯管的推力,可实现俯仰、偏航、横滚三个姿态运动。
13.下面结合附图和实施例对本发明的技术方案作进一步地说明:
附图说明
14.图1为本发明立体结构示意图;
15.图2为本发明分解结构示意图;
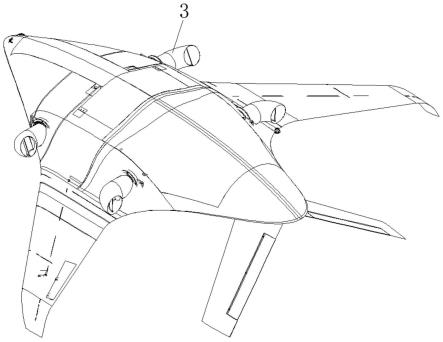
16.图3为喷气推力装置采用涵道风扇驱动的飞行器的结构图;
17.图4为喷气推力装置采用涡喷发动机驱动的飞行器的俯视图;
18.图5为喷气推力装置采用涡喷发动机驱动的飞行器的立体图;
19.图6为等效四杆机构示意图;
20.图7为弯管转动范围示意图;
21.图8为俯仰运动姿态的控制图;
22.图9为横滚运动姿态的控制图;
23.图10为偏航运动姿态的控制图。
具体实施方式
24.如图1-图2所示,本实施方式的姿态可控模块单元包含喷气推力装置1、方向调控装置2、弯管3和机架4;喷气推力装置1安装在机架4上,弯管3与喷气推力装置1的喷气口相连,气流可沿弯管喷出,弯管3可由设置在机架4上的方向调控装置2驱动,弯管3可绕与喷气口对接的端面轴线旋转。
25.本实施方式中气流经过弯管后,喷气推力装置产生的高速气流被迫发生转向,借助方向调控装置驱动弯管可实现一维旋转运动,而通过控制弯管的旋转方向可以控制弯管产生的推力的大小和方向。基于这一原理可实现应用于制作飞行器。
26.基于上述方案,可选地,所述方向调控装置2为连杆机构;所述连杆机构包含舵机2-1、第一连杆2-2和第二连杆2-3;舵机2-1安装在机架4上,第一连杆2-2的一端与舵机2-1的输出轴固接,第一连杆2-2的另一端与第二连杆2-3的一端铰接,第二连杆2-3的另一端与
弯管3的外侧面铰接。如图5所示,第一连杆2-2、第二连杆2-3、弯管3对接端面中心与第二连杆2-3另一端连线、弯管3对接端面中心与第一连杆2-2的一端连线构建为等效四杆机构,由于弯管3为一维矢量旋转,对接端面中心不发生变化,则构建的等效四杆机构会在舵机2-1的驱动下发生变化,进而带的弯管3进行一维矢量旋转。
27.如图6所示,由舵机2-1驱动的等效四杆机构可以带动弯管3进行旋转,弯管3的旋转角度范围为120
°
,并可通过调节等效四杆机构的杆长条件(当为平行四杆机构时,弯管3的旋转范围受平行四杆机构的死点限制)可实现不超过180
°
的旋转范围。图中双箭头方向为连杆偏摆方向。
28.如图2所示,通常,所述弯管3通过轴承固定组件5可转动地支撑在机架4上。进一步地,所述轴承固定组件5包含轴承5-1、轴承固定座5-2、外圈固定环5-3和内圈固定环5-4;轴承固定座5-2安装在机架4上,轴承5-1安装在轴承固定座5-2内,轴承5-1由外圈固定环5-3和内圈固定环5-4定位,外圈固定环5-3固定在轴承固定座5-2上,外管3的端面卡在轴承内圈的一侧面上,外管3与布置在轴承内圈另一侧面的内圈固定环5-4相连,第二连杆2-3的另一端与内圈固定环5-4铰接。可选地,外管3通过螺栓固定在内圈固定环5-4上,轴承固定组件5可实现外管3持续稳定正反旋转,实现一维矢量转动,用于飞行器姿态调节。进一步地,所述喷气推力装置1为涡喷发动机或者涵道风扇。
29.另一个具体实施方式还提供飞行器,该飞行器基于所述姿态可控模块单元制作。包含机体a和四个姿态可控模块单元;四个姿态可控模块单元阵列布置在机体a上,每个姿态可控模块单元的机架4固定在机体a上。可选地,所述飞行器采用涵道风扇或者涡喷发动机提供动力。所述飞行器为垂直起降机或者垂直起降固定翼。
30.基于上述飞行器,再一个实施方式还提供飞行器的姿态控制方法,飞行器姿态控制方法可以通过控制俯仰、偏航、横滚三个姿态以及竖直方向的四个自由度实现飞行器的稳定的位姿控制,当飞行器在竖直方向上进行运动时,仅需控制四个一维矢量的姿态可控模块单元的弯管推力和,不在阐述。控制四个弯管的推力和实现俯仰、偏航、横滚三个姿态运动,为便于表述,如图7-图9所示,设定四个姿态可控模块单元的弯管3为结构相同的第一弯管31、第二弯管32、第三弯管33和第四分弯管34,其中f1、f2、f3、f4分别表示第一弯管31、第二弯管32、第三弯管33和第四弯管34的气流出口的推力。具体标记如图7-图9所示。所述方法包含:
31.如图7所示,俯仰运动控制;控制方向调控装置2使得第一弯管31和第二弯管32同时向前或向后偏转,控制方向调控装置2使得第三弯管33和第四弯管34出口向下,此时第三弯管33和第四弯管34沿z轴上的力为f3和f4,第一弯管31和第二弯管32沿z轴上的力为f21,f1=f2=f3=f4>f21,所以合力产生一个低头力矩,飞行器低头;同理当控制方向调控装置2使得第三弯管33和第四弯管34同时向前或后偏转,合力会产生抬头力矩,飞行器抬头,实现俯仰运动;
32.如图8所示,横滚运动控制:控制方向调控装置2使得第一弯管31和第四弯管34分别向两侧偏转,此时第一弯管31和第四弯管34沿z轴上的力为f11和f41,控制方向调控装置2使得第二弯管32和第三弯管33的出口向下,此时第二弯管32和第三弯管33沿竖直z轴上的力为f2和f3,f1=f2=f3=f4>f11=f41,合力产生一个左滚翻力矩,飞行器向左滚转;同理当控制方向调控装置2使得第二弯管32和第三弯管33分别向两侧偏转,控制方向调控装
置2使得第一弯管31和第四弯管34的出口向下,合力会产生右滚翻力矩,飞行器向右滚转,实现横滚运动;
33.如图9所示,偏航运动控制:控制方向调控装置2使得第一弯管31和第四弯管34同时向后偏转,控制方向调控装置2使得第二弯管32和第三弯管33同时向前偏转时,合力产生一个左偏航力矩,飞行器向左偏航;同理当控制方向调控装置2使得第一弯管31和第四个弯管34同时向前偏转,控制方向调控装置2使得第二弯管32和第三弯管33同时向后偏转,合力会产生右偏航力矩,飞行器向右偏航,实现偏航运动。
34.本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1