一种可折叠扶腰式半自动月面行走装置
1.本发明属星球车技术领域,具体涉及一种可折叠扶腰式半自动月面行走装置。
背景技术:
2.由于月球重力仅为地球的六分之一,宇航员在月面行走时容易出现跃起离地等不稳定情况,存在摔倒等危险,行走装置可提供稳定搀扶作用,以满足宇航员近距离机动需求;同时,当宇航员行走距离较远或疲劳时,可以双脚离地,开启全支撑行驶模式,行走装置提供行驶作用;此外,在载人月球车遇到故障等无法通过的情况时,行走装置可作为应急返回装置,帮助宇航员返回基地或着陆器。因此提出一种可折叠的扶腰式半自动月面行走辅助装置,辅助宇航员的月面行走,提高宇航员一定距离的机动性能。本装置可根据宇航员的身高调节车身高度及角度,对不同宇航员的适应性较强,本装置折叠后体积较小,可置于载人月球车上,作为某一模块或单独放置。
技术实现要素:
3.本发明的目的是为了辅助宇航员在月面低重力环境下的安全稳定行走,同时提供全支撑的行驶模式,设计了一款半自动月面行走装置,在宇航员行走时提供辅助行走及稳定功能,当宇航员行走不便时,切换行驶模式,行走装置提供动力四轮驱动行驶,具有质量轻、折叠比高、机动性强的特点,可作为宇航员月面工作时的辅助行走装置,也可在载人月球车故障后作为应急返回装置。
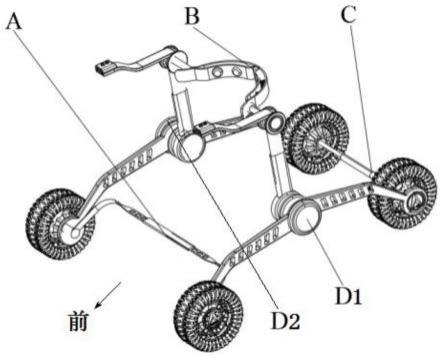
4.本发明的一种可折叠扶腰式半自动月面行走装置,由前悬架a、支撑结构b、后悬架c、夹角调整结构ⅰd1、夹角调整结构ⅱd2组成,其中,前悬架a的右前摇臂e后端通过保护罩ⅱx2与夹角调整结构ⅱd2的第一旋转轴ⅱ12b键连接,前悬架a的左前摇臂f后端通过保护罩ⅰx1与夹角调整结构ⅰd1的第一旋转轴ⅰ12a键连接,前悬架a位于夹角调整结构ⅰd1、夹角调整结构ⅱd2的前方;后悬架c中右后摇臂w前端的连轴孔ⅱ7b与夹角调整结构ⅱd2的第二旋转轴ⅱ13b键连接,后悬架c中左后摇臂s前端的连轴孔ⅰ7a与夹角调整结构ⅰd1的第二旋转轴ⅰ13a键连接;后悬架c位于夹角调整结构ⅰd1和夹角调整结构ⅱd2的后方;支撑结构b的右伸缩管n的下端口ⅱ6b经保护罩x2的预留孔与夹角调整结构ⅱd2的上托板ⅱ14b固接,支撑结构b的左伸缩管p的下端口ⅰ6a经保护罩x1的预留孔与夹角调整结构ⅰd1的上托板ⅰ14a固接;支撑结构b位于夹角调整结构ⅰd1和夹角调整结构ⅱd2的正上方,且左伸缩管p与右伸缩管n均垂直于地面。
5.所述的前悬架a由右前摇臂e、左前摇臂f、左前轮g、左棘轮调角器h、伸缩脚托板i、右棘轮调角器j和右前轮k组成,其中伸缩脚托板i由右伸缩板21、套板22、左伸缩板23组成,左伸缩板23、套板22和右伸缩板21自左至右排列,且右伸缩板21和左伸缩板23均与套板22滑动连接;所述的左棘轮调角器h和右棘轮调角器j的结构相同,方向相反,其中左棘轮调角器h由压缩弹簧26、棘爪27、销对28、棘轮29、压盖30、棘爪轮31、连板ⅰ32a、固定片34、端盖36组成,压缩弹簧26上端与压盖30上端内面固接,压缩弹簧26下端与棘爪27上端固接,棘爪27
下端与棘轮29外圈活动接触;压盖30经销对28的两个销固接于棘爪轮31外圈;端盖36经固定片34与棘轮29固接;连板ⅰ32a下部设有连板孔ⅰ33a,连板ⅰ32a上端与棘爪轮31下端固接;左棘轮调角器h的连板ⅰ32a套入左伸缩板23末端的连接套孔ⅰ24a并用螺栓通过连板孔ⅰ33a与连接通孔ⅰ25a固接二者,右棘轮调角器j的连板ⅱ32b套入右伸缩板21末端的连接套孔ⅱ24b并用螺栓通过连板孔ⅱ33b与连接通孔ⅱ25b固接二者;左前轮g外端的连轴端ⅰ1a设有四个通孔,并经螺钉与左前摇臂f的连轮轴ⅰ2a固接;左前摇臂f经右端连接键槽ⅰ3a与伸缩脚托板i的左棘轮调角器h的棘轮通孔ⅰ35a键连接;右前轮k外端的连轴端ⅱ1b设有四个通孔,并经螺钉与右前摇臂e的连轮轴ⅱ2b固接;右前摇臂e经左端连接键槽ⅱ3b与伸缩脚托板i的右棘轮调角器j的棘轮通孔ⅱ35b键连接。
6.所述的支撑结构b由右伸缩管n、左伸缩管p、右调角结构m、左调角结构q、右扶手l、左扶手r及腰托结构o组成,其中所述的右伸缩管n和左伸缩管p结构相同方向相反,均由电机ⅲ55、连接轴56、支座57、丝杠ⅲ58、丝杠螺母ⅲ59、外管61、内管62组成;外管61上部内壁与内管62下部内壁滑动连接;内管62下端设有通孔60;丝杠螺母ⅲ59固接于内管62下端面;丝杠ⅲ58的下端经连接轴56与电机ⅲ55的输出轴上端固接,丝杠ⅲ58近下端与支座57的中心孔螺纹连接,丝杠ⅲ58上部与丝杠螺母ⅲ59螺纹连接;支座57的左右两侧固接于外管61下部内壁;腰托结构o由球头套ⅰ45a、球头套ⅱ45b、左后腰托带46a、右后腰托带46b、销组47a、弹簧组47b、左前腰托带48a、右前腰托带48b、合页49组成,腰托结构o由球头套ⅰ45a、球头套ⅱ45b、左后腰托带46a、右后腰托带46b、销组47a、弹簧组47b、左前腰托带48a、右前腰托带48b、合页49组成,右后腰托带46b左端经合页49与左后腰托带46a右端活动连接;左前腰托带48a和右前腰托带48b经销组47a的四个销,分别固接于左后腰托带46a和右后腰托带46b前面;弹簧组47b的四个弹簧分别套于销组47a的四个销中;球头套ⅰ45a固接于左后腰托带46a的近前端左面;球头套ⅱ45b固接于右后腰托带46b的近前端右面;腰托结构o的球头套ⅰ45a与左调角结构q连接轴ⅰ4a的连接球头ⅰ43a球面副连接,球头套ⅱ45b与右调角结构m连接轴ⅱ4b的连接球头ⅱ43b球面副连接;右伸缩管n的上端口ⅱ5b固接于右调角结构m的固定筒ⅱ44b表面;左伸缩管p的上端口ⅰ5a固接于左调角结构q的固定筒ⅰ44a表面;左调角结构q和右调角结构m结构相同方向相反,其中右调角结构m由连接轴ⅱ4b、方轴37、按压端盖ⅱ38b、固定齿盘39、活动齿盘40、弹簧41和固定端盖42、固定筒ⅱ44b组成,按压端盖ⅱ38b、固定齿盘39、活动齿盘40、弹簧41、固定端盖42和连接轴ⅱ4b自右至左顺序排列,按压端盖ⅱ38b与活动齿盘40经方轴37固接,固定端盖42与固定筒ⅱ44b固接,固定筒ⅱ44b与固定齿盘39固接,活动齿盘40在固定筒ⅱ44b内部滑动连接,弹簧41连接活动齿盘40与固定端盖42,连接轴ⅱ4b固定于固定端盖42;连接轴ⅱ4b左端设有连接球头ⅱ43b,连接轴ⅰ4a右端设有连接球头ⅰ43a,右扶手l末端与右调角结构m的按压端盖ⅱ38b固连,左扶手r末端与左调角结构q的按压端盖ⅰ38a固连。
7.所述的后悬架c由右后摇臂w、右后轮v、伸缩管u、左后摇臂s、左后轮t组成,其中,所述的伸缩管u由左管50a、右管50b、丝杠螺母ⅰ51a、丝杠螺母ⅱ51b、丝杠ⅰ52a、丝杠ⅱ52b、中管53、电机ⅱ54组成,其中:左管50a的左端设有左板11a,左管50a的右端设有螺纹孔ⅰ51c;右管50b的右端设有右板11b,右管50b的左端设有螺纹孔ⅱ51d;左管50a、中管53和右管50b自左至右排列,电机ⅱ54固接于中管53内圈中部;丝杠ⅰ52a右端固接于电机ⅱ54的左输出端,丝杠ⅱ52b左端固接于电机ⅱ54的右输出端;左管50a的螺纹孔ⅰ51c右端与丝杠螺
母ⅰ51a左面固接,丝杠螺母ⅰ51a与丝杠ⅰ52a螺纹连接,左管50a的外圈与中管53的左孔滑动连接;右管50b的螺纹孔ⅱ51d左端与丝杠螺母ⅱ51b右面固接,丝杠螺母ⅱ51b与丝杠ⅱ52b螺纹连接,右管50b的外圈与中管53的右孔滑动连接;左后摇臂s前端设有连轴孔ⅰ7a,左后摇臂s后端设有连轮孔ⅰ8a;右后摇臂w前端设有连轴孔ⅱ7b,右后摇臂w后端设有连轮孔ⅱ8b;右后摇臂w的连轮孔ⅱ8b与右后轮v的外连轴端ⅱ9b固接;右后轮v的内连轴端ⅱ10b与伸缩管u的右板11b固接;左后摇臂s的连轮孔ⅰ8a与左后轮t的外连轴端ⅰ9a固接;左后轮t的内连轴端ⅰ10a与伸缩管u的左板11a固接。
8.所述的夹角调整结构ⅰd1和夹角调整结构ⅱd2结构相同方向相反,其中夹角调整结构ⅱd2由保护罩ⅱx2、上托板ⅱ14b、固定端15、下托板16和摇臂调角结构ⅱy2组成,上托板ⅱ14b左端固接于固定端15近上端右面,下托板16左端固接于固定端15近下端右面,夹角调整结构ⅱd2经上托板ⅱ14b与下托板16固定于二者之间。所述摇臂调角结构ⅱy2由第一旋转轴ⅱ12b、第二旋转轴ⅱ13b、锥齿轮ⅰ17、锥齿轮ⅱ18、电机ⅰ19、锥齿轮ⅲ20组成,第一旋转轴ⅱ12b、第二旋转轴ⅱ13b、锥齿轮ⅰ17、锥齿轮ⅲ20自右至左顺序排列;电机ⅰ19固接于上托板ⅱ14b和下托板16的后侧,电机ⅰ19输出轴与锥齿轮ⅱ18中心固接;锥齿轮ⅱ18分别与锥齿轮ⅰ17和锥齿轮ⅲ20啮合,锥齿轮ⅰ17与第一旋转轴ⅱ12b同轴转动,锥齿轮ⅲ20与第二旋转轴ⅱ13b同轴转动;夹角调整结构ⅰd1中与夹角调整结构ⅱd2中保护罩ⅱx2、摇臂调角结构ⅱy2、上托板ⅱ14b、第一旋转轴ⅱ12b、第二旋转轴ⅱ13b相对应的零部件分别为:保护罩ⅰx1、摇臂调角结构ⅰy1、上托板ⅰ14a,第一旋转轴ⅰ12a与第二旋转轴ⅰ13a。
9.所述的可折叠扶腰式半自动月面行走装置,展开过程包括:伸缩管u伸出左管50a与右管50b增大左右轮距;左调角结构q与右调角结构m旋转将扶手展开;夹角调整结构ⅰd1与夹角调整结构ⅱd2旋转将前后主摇臂调整至合适角度,最后调节伸缩脚托板i的角度至适合位置。
10.本发明的装置展开后,前轮的轮距相较于后轮更宽,折叠后前轮在外,后轮在内。
11.本发明的装置展开过程中,根据宇航员的身高及位姿,通过调整伸缩管u以及夹角调整结构ⅰd1、夹角调整结构ⅱd2来调节前主摇臂与后主摇臂之间的夹角来实现整车高度的调节;
12.本发明的有益效果在于:
13.能辅助宇航员行走,满足宇航员近距离机动需求;也可在载人月球车故障后作为应急返回装置。
14.能提供两种行驶方式,一为全支撑行驶模式,由轮毂电机驱动行驶;二为半自主行驶模式,宇航员步行,装置起稳固及保护作用。
附图说明
15.图1为可折叠扶腰式半自动月面行走装置的立体图;
16.图2为前悬架a的俯视图;
17.图3为支撑结构b的分解图;
18.图4为后悬架c的分解图;
19.图5为夹角调整结构ⅱd2的立体图;
20.图6为夹角调整结构ⅱd2的内部结构图;
21.图7为夹角调整结构ⅰd1的内部结构图;
22.图8为保护罩ⅱx2的正视图;
23.图9为摇臂调角结构ⅱy2的正视图;
24.图10为摇臂调角结构ⅰy1的正视图;
25.图11为保护罩ⅰx1的俯视图;
26.图12为摇臂调角结构ⅱy2k的俯视图;
27.图13为右前轮k的连接示意图;
28.图14为伸缩脚托板i的俯视图;
29.图15为左棘轮调角器h的正视图;
30.图16为左棘轮调角器h的剖视图;
31.图17为右棘轮调角器j的结构示意图;
32.图18为左调角结构q的立体图;
33.图19为右调角结构m的分解图;
34.图20为右调角结构m的剖视图;
35.图21为腰托结构o俯视图;
36.图22为伸缩管u的剖视图;
37.图23为右伸缩管n的剖视图;
38.图24为可折叠扶腰式半自动月面行走装置展开过程示意图;
39.图25为全支撑行驶模式的示意图;
40.图26为半自主行驶模式的示意图;
41.其中:a.前悬架b.支撑结构c.后悬架d1.夹角调整结构ⅰd2.夹角调整结构ⅱe.右前摇臂f.左前摇臂g.左前轮h.左棘轮调角器i.伸缩脚托板j.右棘轮调角器k.右前轮l.右扶手m.右调角结构n.右伸缩管o.腰托结构p.左伸缩管q.左调角结构r.左扶手s.左后摇臂t.左后轮u.伸缩管v.右后轮w.右后摇臂x1.保护罩ⅰx2.保护罩ⅱy1.摇臂调角结构ⅰy2.摇臂调角结构ⅱ1a.连轴端ⅰ1b.连轴端ⅱ2a.连轮轴ⅰ2b.连轮轴ⅱ3a.连接键槽ⅰ3b.连接键槽ⅱ4a.连接轴ⅰ4b.连接轴ⅱ5a.上端口ⅰ5b.上端口ⅱ6a.下端口ⅰ6b.下端口ⅱ7a.连轴孔ⅰ7b.连轴孔ⅱ8a.连轮孔ⅰ8b.连轮孔ⅱ9a.外连轴端ⅰ9b.外连轴端ⅱ10a.内连轴端ⅰ10b.内连轴端ⅱ11a.左板11b.右板12a.第一旋转轴ⅰ12b.第一旋转轴ⅱ13a.第二旋转轴ⅰ13b.第二旋转轴ⅱ14a.上托板ⅰ14b.上托板ⅱ15.固定端16.下托板17.锥齿轮ⅰ18.锥齿轮ⅱ19.电机ⅰ20.锥齿轮ⅲ21.右伸缩板22.套板23.左伸缩板24a.连接套孔ⅰ24b.连接套孔ⅱ25a.连接通孔ⅰ25b.连接通孔ⅱ26.压缩弹簧27.棘爪28.销对29.棘轮30.压盖31.棘爪轮32a.连板ⅰ32b.连板ⅱ33a.连板孔ⅰ33b.连板孔ⅱ34.固定片35a.棘轮通孔ⅰ35b.棘轮通孔ⅱ36.端盖37.方轴38a.按压端盖ⅰ38b.按压端盖ⅱ39.固定齿盘40.活动齿盘41.弹簧42.固定端盖43a.连接球头ⅰ43b.连接球头ⅱ44a.固定筒ⅰ44b.固定筒ⅱ45a.球头套ⅰ45b.球头套ⅱ46a.左后腰托带46b.右后腰托带47a.销组47b.弹簧组48a.左前腰托带48b.左前腰托带49.合页50a.左管50b.右管51a.丝杠螺母ⅰ51b.丝杠螺母ⅱ51c.螺纹孔ⅰ51d.螺纹孔ⅱ52a.丝杠ⅰ52b.丝杠ⅱ53.中管54.电机ⅱ55.电机ⅲ56.连接轴57.支座58.丝杠ⅲ59.丝杠螺母ⅲ60.通孔61.外管62.内管。
具体实施方式
42.下面结合附图描述本发明。
43.如图1至图3、图6和图7所示,本发明的一种可折叠扶腰式半自动月面行走装置,由前悬架a、支撑结构b、后悬架c、夹角调整结构ⅰd1、夹角调整结构ⅱd2组成,其中,前悬架a的右前摇臂e后端通过保护罩ⅱx2与夹角调整结构ⅱd2的第一旋转轴ⅱ12b键连接,前悬架a的左前摇臂f后端通过保护罩ⅰx1与夹角调整结构ⅰd1的第一旋转轴ⅰ12a键连接,前悬架a位于夹角调整结构ⅰd1、夹角调整结构ⅱd2的前方;后悬架c中右后摇臂w前端的连轴孔ⅱ7b与夹角调整结构ⅱd2的第二旋转轴ⅱ13b键连接,后悬架c中左后摇臂s前端的连轴孔ⅰ7a与夹角调整结构ⅰd1的第二旋转轴ⅰ13a键连接;后悬架c位于夹角调整结构ⅰd1和夹角调整结构ⅱd2的后方;支撑结构b的右伸缩管n的下端口ⅱ6b经保护罩x2的预留孔与夹角调整结构ⅱd2的上托板ⅱ14b固接,支撑结构b的左伸缩管p的下端口ⅰ6a经保护罩x1的预留孔与夹角调整结构ⅰd1的上托板ⅰ14a固接;支撑结构b位于夹角调整结构ⅰd1和夹角调整结构ⅱd2的正上方,且左伸缩管p与右伸缩管n均垂直于地面。
44.如图2、图13至图17所示,所述的前悬架a由右前摇臂e、左前摇臂f、左前轮g、左棘轮调角器h、伸缩脚托板i、右棘轮调角器j和右前轮k组成,其中伸缩脚托板i由右伸缩板21、套板22、左伸缩板23组成,左伸缩板23、套板22和右伸缩板21自左至右排列,且右伸缩板21和左伸缩板23均与套板22滑动连接;所述的左棘轮调角器h和右棘轮调角器j的结构相同,方向相反,其中左棘轮调角器h由压缩弹簧26、棘爪27、销对28、棘轮29、压盖30、棘爪轮31、连板ⅰ32a、固定片34、端盖36组成,压缩弹簧26上端与压盖30上端内面固接,压缩弹簧26下端与棘爪27上端固接,棘爪27下端与棘轮29外圈活动接触;压盖30经销对28的两个销固接于棘爪轮31外圈;端盖36经固定片34与棘轮29固接;连板ⅰ32a下部设有连板孔ⅰ33a,连板ⅰ32a上端与棘爪轮31下端固接;左棘轮调角器h的连板ⅰ32a套入左伸缩板23末端的连接套孔ⅰ24a并用螺栓通过连板孔ⅰ33a与连接通孔ⅰ25a固接二者,右棘轮调角器j的连板ⅱ32b套入右伸缩板21末端的连接套孔ⅱ24b并用螺栓通过连板孔ⅱ33b与连接通孔ⅱ25b固接二者;左前轮g外端的连轴端ⅰ1a设有四个通孔,并经螺钉与左前摇臂f的连轮轴ⅰ2a固接;左前摇臂f经右端连接键槽ⅰ3a与伸缩脚托板i的左棘轮调角器h的棘轮通孔ⅰ35a键连接;右前轮k外端的连轴端ⅱ1b设有四个通孔,并经螺钉与右前摇臂e的连轮轴ⅱ2b固接;右前摇臂e经左端连接键槽ⅱ3b与伸缩脚托板i的右棘轮调角器j的棘轮通孔ⅱ35b键连接。
45.如图3、图18至图20、图23所示,所述的支撑结构b由右伸缩管n、左伸缩管p、右调角结构m、左调角结构q、右扶手l、左扶手r及腰托结构o组成,其中所述的右伸缩管n和左伸缩管p结构相同方向相反,均由电机ⅲ55、连接轴56、支座57、丝杠ⅲ58、丝杠螺母ⅲ59、外管61、内管62组成;外管61上部内壁与内管62下部内壁滑动连接;内管62下端设有通孔60;丝杠螺母ⅲ59固接于内管62下端面;丝杠ⅲ58的下端经连接轴56与电机ⅲ55的输出轴上端固接,丝杠ⅲ58近下端与支座57的中心孔螺纹连接,丝杠ⅲ58上部与丝杠螺母ⅲ59螺纹连接;支座57的左右两侧固接于外管61下部内壁;腰托结构o由球头套ⅰ45a、球头套ⅱ45b、左后腰托带46a、右后腰托带46b、销组47a、弹簧组47b、左前腰托带48a、右前腰托带48b、合页49组成,腰托结构o由球头套ⅰ45a、球头套ⅱ45b、左后腰托带46a、右后腰托带46b、销组47a、弹簧组47b、左前腰托带48a、右前腰托带48b、合页49组成,右后腰托带46b左端经合页49与左后腰托带46a右端活动连接;左前腰托带48a和右前腰托带48b经销组47a的四个销,分别固接
于左后腰托带46a和右后腰托带46b前面;弹簧组47b的四个弹簧分别套于销组47a的四个销中;球头套ⅰ45a固接于左后腰托带46a的近前端左面;球头套ⅱ45b固接于右后腰托带46b的近前端右面;腰托结构o的球头套ⅰ45a与左调角结构q连接轴ⅰ4a的连接球头ⅰ43a球面副连接,球头套ⅱ45b与右调角结构m连接轴ⅱ4b的连接球头ⅱ43b球面副连接;右伸缩管n的上端口ⅱ5b固接于右调角结构m的固定筒ⅱ44b表面;左伸缩管p的上端口ⅰ5a固接于左调角结构q的固定筒ⅰ44a表面;左调角结构q和右调角结构m结构相同方向相反,其中右调角结构m由连接轴ⅱ4b、方轴37、按压端盖ⅱ38b、固定齿盘39、活动齿盘40、弹簧41和固定端盖42、固定筒ⅱ44b组成,按压端盖ⅱ38b、固定齿盘39、活动齿盘40、弹簧41、固定端盖42和连接轴ⅱ4b自右至左顺序排列,按压端盖ⅱ38b与活动齿盘40经方轴37固接,固定端盖42与固定筒ⅱ44b固接,固定筒ⅱ44b与固定齿盘39固接,活动齿盘40在固定筒ⅱ44b内部滑动连接,弹簧41连接活动齿盘40与固定端盖42,连接轴ⅱ4b固定于固定端盖42;连接轴ⅱ4b左端设有连接球头ⅱ43b,连接轴ⅰ4a右端设有连接球头ⅰ43a,右扶手l末端与右调角结构m的按压端盖ⅱ38b固连,左扶手r末端与左调角结构q的按压端盖ⅰ38a固连。
46.如图4、图22所示,所述的后悬架c由右后摇臂w、右后轮v、伸缩管u、左后摇臂s、左后轮t组成,其中,所述的伸缩管u由左管50a、右管50b、丝杠螺母ⅰ51a、丝杠螺母ⅱ51b、丝杠ⅰ52a、丝杠ⅱ52b、中管53、电机ⅱ54组成,其中:左管50a的左端设有左板11a,左管50a的右端设有螺纹孔ⅰ51c;右管50b的右端设有右板11b,右管50b的左端设有螺纹孔ⅱ51d;左管50a、中管53和右管50b自左至右排列,电机ⅱ54固接于中管53内圈中部;丝杠ⅰ52a右端固接于电机ⅱ54的左输出端,丝杠ⅱ52b左端固接于电机ⅱ54的右输出端;左管50a的螺纹孔ⅰ51c右端与丝杠螺母ⅰ51a左面固接,丝杠螺母ⅰ51a与丝杠ⅰ52a螺纹连接,左管50a的外圈与中管53的左孔滑动连接;右管50b的螺纹孔ⅱ51d左端与丝杠螺母ⅱ51b右面固接,丝杠螺母ⅱ51b与丝杠ⅱ52b螺纹连接,右管50b的外圈与中管53的右孔滑动连接;左后摇臂s前端设有连轴孔ⅰ7a,左后摇臂s后端设有连轮孔ⅰ8a;右后摇臂w前端设有连轴孔ⅱ7b,右后摇臂w后端设有连轮孔ⅱ8b;右后摇臂w的连轮孔ⅱ8b与右后轮v的外连轴端ⅱ9b固接;右后轮v的内连轴端ⅱ10b与伸缩管u的右板11b固接;左后摇臂s的连轮孔ⅰ8a与左后轮t的外连轴端ⅰ9a固接;左后轮t的内连轴端ⅰ10a与伸缩管u的左板11a固接。
47.如图5-图12所示,所述的夹角调整结构ⅰd1和夹角调整结构ⅱd2结构相同方向相反,其中夹角调整结构ⅱd2由保护罩ⅱx2、上托板ⅱ14b、固定端15、下托板16和摇臂调角结构ⅱy2组成,上托板ⅱ14b左端固接于固定端15近上端右面,下托板16左端固接于固定端15近下端右面,夹角调整结构ⅱd2经上托板ⅱ14b与下托板16固定于二者之间。所述摇臂调角结构ⅱy2由第一旋转轴ⅱ12b、第二旋转轴ⅱ13b、锥齿轮ⅰ17、锥齿轮ⅱ18、电机ⅰ19、锥齿轮ⅲ20组成,第一旋转轴ⅱ12b、第二旋转轴ⅱ13b、锥齿轮ⅰ17、锥齿轮ⅲ20自右至左顺序排列;电机ⅰ19固接于上托板ⅱ14b和下托板16的后侧,电机ⅰ19输出轴与锥齿轮ⅱ18中心固接;锥齿轮ⅱ18分别与锥齿轮ⅰ17和锥齿轮ⅲ20啮合,锥齿轮ⅰ17与第一旋转轴ⅱ12b同轴转动,锥齿轮ⅲ20与第二旋转轴ⅱ13b同轴转动;夹角调整结构ⅰd1中与夹角调整结构ⅱd2中保护罩ⅱx2、摇臂调角结构ⅱy2、上托板ⅱ14b、第一旋转轴ⅱ12b、第二旋转轴ⅱ13b相对应的零部件分别为:保护罩ⅰx1、摇臂调角结构ⅰy1、上托板ⅰ14a,第一旋转轴ⅰ12a与第二旋转轴ⅰ13a。
48.如图15-图17所示,所述的左棘轮调角器h和右棘轮调角器j可单向调节角度,并且
具有反向锁死功能。
49.如图18-图20所示,左调角结构q和右调角结构m均通过按压按压端盖ⅰ38a与按压端盖ⅱ38b使得固定齿盘39与活动齿盘40分离,随后调节扶手的高度,调节完成后松开,在弹簧ⅰ41的作用下固定齿盘39与活动齿盘40重新啮合。
50.如图24所示,所述的月面行走装置,展开过程包括:伸缩管u伸出左管50a与右管50b增大左右轮距;左调角结构q与右调角结构m旋转将扶手展开;夹角调整结构ⅰd1与夹角调整结构ⅱd2旋转将前后主摇臂调整至合适角度,最后调节伸缩脚托板i的角度至适合位置。
51.如图25所示,为月面行走装置的全支撑行驶模式:由轮毂电机驱动行驶。
52.如图26所示,为半自主行驶模式:宇航员步行,装置起稳固及保护作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1