一种无人机自适应灯具的制作方法
1.本实用新型涉及无人机照明技术领域,尤其是指一种无人机自适应灯具。
背景技术:
2.近年来,随着航拍无人机市场的不断发展与完善,航拍无人机在各行各业得到广泛应用。为了提高航拍无人机的拍摄效果,通常会在航拍无人机上增设灯具,用于打光和照明。然而现有的灯具在使用时的局限性很大,将灯具与无人机进行软件和硬件的适配后,并需要通过远程遥控设备控制灯具的照射角度与航拍无人机的相机的拍摄角度相适应,现有的灯具的连接和适配复杂,操作步骤繁琐。因此,缺陷十分明显,亟需提供一种解决方案。
技术实现要素:
3.为了解决上述技术问题,本实用新型的目的在于提供一种无人机自适应灯具。
4.为了实现上述目的,本实用新型采用如下技术方案:
5.一种无人机自适应灯具,其包括灯体一、灯体二、用于连接无人机的连接结构及分别设置于连接结构上的控制主体、传感器一、驱动装置一和驱动装置二,所述驱动装置一的输出端与灯体一连接,所述驱动装置二的输出端与灯体二连接,所述传感器一、驱动装置一、驱动装置二、灯体一和灯体二分别与控制主体电连接,所述传感器一用于感应无人机的相机的旋转角度。
6.进一步地,所述无人机自适应灯具还包括设置于连接结构内的供电模块;所述供电模块能分别为控制主体、传感器一、驱动装置一、驱动装置二、灯体一和灯体二供电。
7.进一步地,所述连接结构上设置有挂钩。
8.进一步地,所述连接结构上还设置有卡接槽;所述挂钩的数量为两个;所述卡接槽位于两个挂钩之间。
9.进一步地,所述驱动装置一和驱动装置二分别设置于连接结构的两侧。
10.进一步地,所述连接结构上设置有容置槽及锁定件,所述供电模块装设于容置槽内,所述锁定件用于对容置槽内的供电模块进行锁定或解锁。
11.进一步地,所述传感器一设置于连接结构上,所述传感器一还能用于感应无人机的飞行姿态。
12.进一步地,所述无人机自适应灯具还包括用于感应无人机的飞行姿态的传感器二;所述传感器二与控制主体电连接。
13.本实用新型的有益效果:本实用新型无需与无人机进行适配,只需将无人机自适应灯具挂设于无人机上即可使用,连接结构的结构简单,与无人机的连接方便,通过控制主体和传感器一配合同步控制灯体一及灯体二转动,灯体一、灯体二和无人机的相机的角度调节的同步性好,灯体一和灯体二的照明更为灵活、迅捷,提高了无人机的相机的拍照效果及拍摄效率。
附图说明
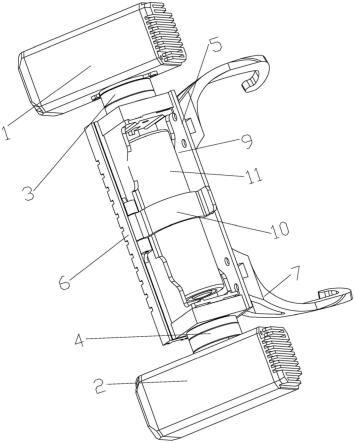
14.图1为本实用新型的立体结构示意图。
15.图2为本实用新型的正视结构示意图。
16.附图标记说明:
17.1、灯体一;2、灯体二;3、驱动装置一;4、驱动装置二;5、连接结构;6、控制主体;7、挂钩;8、卡接槽;9、容置槽;10、锁定件;11、供电模块。
具体实施方式
18.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
19.如图1至图2所示,本实用新型提供的一种无人机自适应灯具,其包括灯体一1、灯体二2、用于连接无人机的连接结构5及分别设置于连接结构5上的控制主体6、传感器一、驱动装置一3和驱动装置二4,所述驱动装置一3的输出端与灯体一1连接,所述驱动装置二4的输出端与灯体二2连接,所述传感器一、驱动装置一3、驱动装置二4、灯体一1和灯体二2分别与控制主体6电连接,所述传感器一用于感应无人机的相机的旋转角度。
20.具体地,所述传感器一设置于连接结构5上并与无人机的相机云台电连接,所述传感器一可采用姿态传感器;所述连接结构5上设置有挂钩7,连接结构5通过挂钩7挂设于无人机上;所述无人机自适应灯具还包括设置于连接结构5内的供电模块11;所述供电模块11能分别为控制主体6、传感器一、驱动装置一3、驱动装置二4、灯体一1和灯体二2供电;所述控制主体6可采用mcu控制器;所述驱动装置一3和驱动装置二4均可采用无刷电机。在实际使用过程中,将挂钩7挂设于无人机上,再将传感器一与无人机的相机云台电连接,通过无人机的相机云台带动无人机的相机进行转动,传感器一对无人机的相机云台的姿态变化进行监测,并将监测到的无人机的相机云台的姿态变化数据传输至控制主体6,控制主体6接收、分析数据以通过驱动装置一3及驱动装置二4分别控制灯体一1及灯体二2跟随无人机的相机同步转动,使得灯体一1和灯体二2的照明角度与无人机的相机的拍摄角度相适应,从而实现无人机自适应灯具的照明角度的自适应调整。无人机自适应灯具具有一套完整的控制系统,无需与无人机进行适配,只需将无人机自适应灯具挂设于无人机上即可使用,连接结构5的结构简单,与无人机的连接方便,通过控制主体6和传感器一配合同步控制灯体一1及灯体二2转动,灯体一1、灯体二2和无人机的相机的角度调节的同步性好,灯体一1和灯体二2的照明更为灵活、迅捷,提高了无人机的相机的拍照效果及拍摄效率。
21.进一步地,所述连接结构5上还设置有卡接槽8;所述挂钩7的数量为两个;所述卡接槽8位于两个挂钩7之间。
22.在实际使用过程中,卡接槽8可与无人机的壳体或卡接部凹凸适配,从而进一步提高了连接结构5与无人机连接时的稳定性,防止高空拍摄时,灯体一1或/和灯体二2出现摇晃或晃动等问题,提高了照明质量。
23.进一步地,所述驱动装置一3和驱动装置二4分别设置于连接结构5的两侧。
24.在实际使用过程中,灯体一1和灯体二2对称设置于连接结构5的两侧,避免了无人机自适应灯具的重心产生偏移,提高了无人机自适应灯具在使用时的稳定性。
25.进一步地,所述连接结构5上还设置有容置槽9及锁定件10,所述供电模块11装设
于容置槽9内,所述锁定件10用于对容置槽9内的供电模块11进行锁定或解锁。
26.在实际使用过程中,供电模块11可采用蓄电池。将供电模块11卡设于容置槽9内,通过锁定件10将供电模块11锁定在容置槽9内,防止供电模块11从容置槽9内脱出,导致电路中断的问题,从而提高了供电模块11供电时的安全性。当需要对供电模块11进行充电时,可通过锁定件10对供电模块11进行解锁,将供电模块11从容置槽9内取出,并使用外部设备对供电模块11进行充电,供电模块11的拆装方便。
27.进一步地,所述传感器一还能用于感应无人机的飞行姿态。
28.由于传感器一设置于连接结构5上,传感器一跟随无人机同步飞行。传感器一能监测无人机的飞行姿态,并把监测到的姿态数据或信号传给控制主体6,控制主体6接收并分析收到的姿态数据或信号以控制灯体一1或/和灯体二2的开关,例如:无人机顺时针旋转360
°
,传感器一通过控制主体6控制灯体一1和灯体二2开灯;无人机逆时针旋转360
°
,传感器一通过控制主体6控制灯体一1和灯体二2关灯。本实用新型不但能实现灯体一1和灯体二2的自适应角度调节,还能通过感应无人机的飞行姿态实现灯体一1和灯体二2的自动开关,实用性强,自动化程度高。
29.实施例二。
30.进一步地,所述无人机自适应灯具还包括用于感应无人机的飞行姿态的传感器二;所述传感器二与控制主体6电连接。
31.具体地,所述传感器二可采用姿态传感器;所述供电模块11还能为传感器二供电;所述传感器二装设于连接结构5上。传感器一和传感器二分别监测无人机的相机云台和无人机的姿态变化,再通过控制主体6控制灯体一1或/和灯体二2旋转或开关。传感器一和传感器二的工作互不干扰,感应时的灵敏度高,提高了驱动装置一3和驱动装置二4同步转动时的精准度及灯体一1和灯体二2开关时的灵敏度。
32.本实施例中的所有技术特征均可根据实际需要而进行自由组合。
33.上述实施例为本实用新型较佳的实现方案,除此之外,本实用新型还可以其它方式实现,在不脱离本技术方案构思的前提下任何显而易见的替换均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1