飞行器的制作方法
1.本公开涉及飞行器技术领域,具体地,涉及一种飞行器。
背景技术:
2.现有技术中,无论是对于四旋翼还是六旋翼乃至更多旋翼飞行器中,旋翼的径向平面和机体所在平面都是相互平行的,即,旋翼的转动轴线垂直于机体所在的平面。在飞机向前飞或向后飞时,机体需要相对于水平面倾斜,从而使旋翼的径向平面相对于水平面倾斜,进而使旋翼能够为机体提供沿水平方向的分力,以供机体向前飞或向后飞。
3.然而,在机体倾斜时会形成阻力,飞行速度越快阻力越大,并且机体会受到一个向下的压力,此时要保持飞行速度或飞行高度则需要增加旋翼的转速,导致飞行器功率消耗增加。
技术实现要素:
4.本公开的目的是提供一种飞行器,以解决相关技术中存在的技术问题。
5.为了实现上述目的,本公开提供一种飞行器,包括机体、旋翼以及旋翼降噪结构,所述旋翼安装于所述机体,所述旋翼包括转轴和连接于所述转轴的多个翼片,所述翼片沿所述转轴的径向延伸,所述转轴的轴线与所述机体所在的平面成角度设置,且所述转轴的轴线与所述机体所在的平面之间的夹角为锐角,所述多个翼片远离所述转轴的翼尖通过所述旋翼降噪结构相互连接。
6.可选地,所述机体的左右两侧均设置有多个所述旋翼,所述机体的左右两侧的多个所述旋翼均沿所述机体的前后方向排列;
7.沿从所述机体的前方至所述机体的后方的方向,所述机体左侧的多个所述旋翼与所述机体的底面之间的距离逐渐增大;
8.沿从所述机体的前方至所述机体的后方的方向,所述机体右侧的多个所述旋翼与所述机体的底面之间的距离逐渐增大。
9.可选地,所述机体左侧的每相邻两个所述旋翼在所述机体的上下方向上的间距相同,且所述机体左侧的每相邻两个所述旋翼在所述机体的前后方向上的间距相同;
10.所述机体右侧的每相邻两个所述旋翼在所述机体的上下方向上的间距相同,且所述机体右侧的每相邻两个所述旋翼在所述机体的前后方向上的间距相同。
11.可选地,所述机体左侧的多个所述旋翼与所述机体右侧的多个所述旋翼关于所述机体的中心轴线对称。
12.可选地,所述飞行器还包括旋翼安装臂,所述旋翼安装臂的一端连接于所述机体,所述旋翼安装臂的另一端设置有用于安装所述转轴的安装面,所述安装面与所述机体所在的平面成角度设置,且所述安装面与所述机体所在的平面之间的夹角角度与所述转轴的轴线与所述机体所在的平面之间的夹角角度相同。
13.可选地,所述旋翼降噪结构形成为圆环状结构,所述圆环状结构的圆心与所述转
轴的轴线重合,所述翼片位于所述圆环状结构的内侧。
14.可选地,所述旋翼降噪结构由碳纤维材料制成。
15.可选地,所述旋翼降噪结构与所述翼片一体成型。
16.可选地,所述转轴的轴线与所述机体所在的平面之间的夹角为60
°‑
85
°
。
17.可选地,所述飞行器还包括连接于所述机体的起落架,所述起落架包括位于所述机体下方的支撑部,所述支撑部具有用于支撑在水平地面上的支撑面,所述支撑面与所述机体所在的平面成角度设置,且所述支撑面垂直于所述转轴的轴线,以使在所述支撑面支撑在所述水平地面上时,所述转轴的轴线能够与所述水平地面垂直。
18.通过上述技术方案,由于旋翼的转轴的轴线与机体所在的平面成角度设置,当飞行器需要垂直起飞时,可以使机体所在的平面处于相对于水平面倾斜的状态,从而使旋翼的转轴与水平面垂直,这样,旋翼在转动时能产生垂直向上的升力,实现飞行器的垂直起飞。当飞行器飞行到合适的高度需要巡航时(即飞行器需要向前飞行或向后飞行时),可以通过调整旋翼的转速等使机体所在的平面处于与水平面相互平行的状态,从而使旋翼的转轴的轴线相对于水平面倾斜,这样,旋翼能够产生一个水平方向的分力,以供飞行器向前或向后飞行。在飞行器向前或向后飞行时,由于机体所在的平面处于与水平面相互平行的状态,可以减小飞行器在飞行过程中的迎风面积,从而减小飞行器飞行过程中的迎风阻力,以达到提升飞行器的飞行速度、降低旋翼的功率消耗的目的。
19.也就是说,在本公开提供的飞行器中,由于旋翼的转的轴线与机体所在的平面成角度设置,使得在飞行器向前飞行或向后飞行时,机体所在的平面能够处于与水平面相互平行的状态,与现有技术中飞行器在飞行时,其机体所在的平面相对于水平面倾斜的技术方案相比,本公开提供的飞行器能够减小机体在飞行过程中受到的阻力,进而能够在降低旋翼的功率消耗的同时,保证飞行器的飞行速度。
20.另外,本公开提供的飞行器中还设置有旋翼降噪结构,由于该旋翼降噪结构与翼片远离转轴的翼尖连接,一方面,旋翼降噪结构可以对翼片起到保护作用,避免翼片在转动过程中与外界发生干涉,造成对翼片的损坏,另一方面,可以减小翼片在转动过程中翼片的尖部的振动及诱导阻力,降低了气流运动的激烈程度,从而减小翼片在转动过程中产生的噪声,达到降低噪音的目的,并且,上述旋翼降噪结构还能减少紊流,有效阻止诱导阻力带来的螺旋桨效率降低。
21.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
22.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
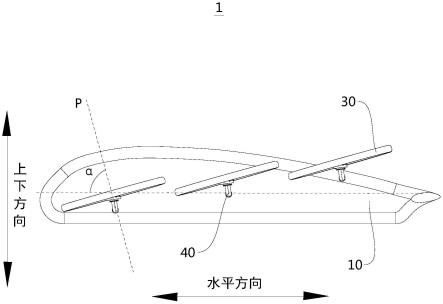
23.图1是本公开一种示例性实施例提供的飞行器的侧视图,其中,转轴的轴线与机体所在的平面之间成角度设置;
24.图2是本公开一种示例性实施例提供的飞行器的侧视图,其中,转轴的轴线处于与水平面垂直的状态;
25.图3是本公开一种示例性实施例提供的飞行器的局部分解图;
26.图4是图3的a部分的放大图;
27.图5是本公开一种示例性实施例提供的飞行器的另一角度的局部分解图;
28.图6是本公开一种示例性实施例提供的飞行器的立体图;
29.图7是本公开一种示例性实施例提供的飞行器的侧视图,其中,还示出了起落架;
30.图8是本公开一种示例性实施例提供的飞行器与支撑斜面相配合的示意图。
31.附图标记说明
32.1-飞行器;10-机体;20-旋翼;21-转轴;p-转轴的轴线;22-翼片;30-旋翼降噪结构;40-旋翼安装臂;41-安装面;50-起落架;51-支撑部;510-支撑面;100-斜坡平台;101-支撑斜面;102-限位结构。
具体实施方式
33.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
34.在本公开中,在未作相反说明的情况下,使用的方位词如“上下方向、左右方向、前后方向、水平方向”通常是指飞行器在正常飞行状态下的上下方向、左右方向、前后方向、水平方向,具体地,可以参考图1-图3以及图5、图7以及图8所示。“内、外”是指相应结构的内、外,“远、近”是指距离相应结构的远、近。
35.参考图1-图8所示,本公开提供一种飞行器1,包括机体10、旋翼20以及旋翼降噪结构30,旋翼20安装于机体10,旋翼20包括转轴21和连接于转轴21的多个翼片22,翼片22沿转轴21的径向延伸,转轴21的轴线与机体10所在的平面成角度设置,且转轴21的轴线p与机体10所在的平面之间的夹角α为锐角,多个翼片22远离转轴21的翼尖通过旋翼降噪结构30相互连接。
36.这里,需要说明的是,上述机体10所在的平面指的是:机体10的长度方向和机体10的宽度方向所共同限定的平面。
37.通过上述技术方案,由于旋翼20的转轴21的轴线p与机体10所在的平面成角度设置,当飞行器1需要垂直起飞时,可以使机体10所在的平面处于相对于水平面倾斜的状态,从而使旋翼20的转轴21与水平面垂直(如图2所示),这样,旋翼20在转动时能产生垂直向上的升力,实现飞行器1的垂直起飞。当飞行器1飞行到合适的高度需要巡航时(即飞行器1需要向前飞行或向后飞行时),可以通过调整旋翼20的转速等使机体10所在的平面处于与水平面相互平行的状态,从而使旋翼20的转轴21的轴线p相对于水平面倾斜(如图1所示),这样,旋翼20能够产生一个水平方向的分力,以供飞行器1向前或向后飞行。在飞行器1向前或向后飞行时,由于机体10所在的平面处于与水平面相互平行的状态,可以减小飞行器1在飞行过程中的迎风面积,从而减小飞行器1飞行过程中的迎风阻力,以达到提升飞行器1的飞行速度、降低旋翼20的功率消耗的目的。
38.也就是说,在本公开提供的飞行器1中,由于旋翼20的转轴21的轴线p与机体10所在的平面成角度设置,使得在飞行器1向前飞行或向后飞行时,机体10所在的平面能够处于与水平面相互平行的状态,与现有技术中飞行器在飞行时,其机体所在的平面相对于水平面倾斜的技术方案相比,本公开提供的飞行器1能够减小机体10在飞行过程中受到的阻力,进而能够在降低旋翼20的功率消耗的同时,保证飞行器1的飞行速度。
39.另外,本公开提供的飞行器1中还设置有旋翼降噪结构30,由于该旋翼降噪结构30
与翼片22远离转轴21的翼尖连接,一方面,旋翼降噪结构30可以对翼片22起到保护作用,避免翼片22在转动过程中与外界发生干涉,造成对翼片22的损坏,另一方面,可以减小翼片22在转动过程中翼片22的尖部的振动及诱导阻力,降低了气流运动的激烈程度,从而减小翼片22在转动过程中产生的噪声,达到降低噪音的目的,并且,上述旋翼降噪结构30还能减少紊流,有效阻止诱导阻力带来的螺旋桨效率降低。
40.可选地,转轴21的轴线p与机体10所在的平面之间的夹角α可以为60
°‑
85
°
。
41.上述旋翼20可以的数量可以为一个也可以为多个,且旋翼20可以设置在机体10的任意位置,例如,机体10的侧部、顶部、头部、尾部等,本公开对此不作限定。作为本公开提供的一种示例性实施方式,如图5、图6所示,机体10的左右两侧均可以设置有多个旋翼20,机体10的左右两侧的多个旋翼20均沿机体10的前后方向排列。
42.由于机体10从前到后设置有多个旋翼20,在飞行器1需要垂直起飞时,可以通过增大靠近机体10前方的旋翼20的转速来使机体10所在的平面相对于水平面倾斜,即,机体10处于机头上仰的状态;当飞行器1需要向前或向后飞行时,可以通过增大靠近机体10后方的旋翼20的转速来使机体10所在的平面处于与水平面平行的状态。当然,这里只是提供了一种供选择的通过调节各旋翼20转速的方式来调节机体10的姿态的方式,在飞行器1垂直起飞时,也可以通过后文提及的斜坡平台100或起落架50来使机体10所在的平面相对于水平面倾斜。
43.可选地,如图5、图6所示,沿从机体10的前方至机体10的后方的方向,机体10左侧的多个旋翼20与机体10的底面之间的距离逐渐增大,沿从机体10的前方至机体10的后方的方向,机体10右侧的多个旋翼20与机体10的底面之间的距离逐渐增大。也就是说,多个旋翼20分别设置在机体10的左右两侧,且设置在机体10左侧的旋翼20和右侧的旋翼20在机体10的高度方向上也不处于同一高度,一方面,可以避免相邻的旋翼20之间所产生的气流对彼此造成干扰,另一方面,可以使得机体10在左右方向以及上下方向的受力更加均匀,使得在对飞行器1的飞行控制过程中具有一个合适的冗余量。
44.在本公开提供的一种具体的实施方式中,如图5、图6所示,旋翼20的数量为六个,在机体10的左右两侧各设有三个旋翼20。当然,本公开并不限定旋翼20的设置数量,旋翼20的数量也可以为八个、十个、十二个或者更多。
45.为了进一步提升飞行器1在飞行过程中的稳定性,可选地,如图1-图8所示,机体10左侧的每相邻两个旋翼20在机体10的上下方向上的间距相同,且机体10左侧的每相邻两个旋翼20在机体10的前后方向上的间距相同,机体10右侧的每相邻两个旋翼20在机体10的上下方向上的间距相同,且机体10右侧的每相邻两个旋翼20在机体10的前后方向上的间距相同。一方面,可以是的旋翼20在机体10的左右、前后分布的更加均匀,在飞行器1飞行过程中,机体10在左右、前后两侧的受力更加均匀,更利于飞行器1在飞行过程中的平稳性。
46.可选地,在机体10左侧、右侧的每相邻的两个旋翼20在机体10的上下方向上的间距也可以相同,并且机体10左侧、右侧的每相邻两个旋翼20在机体10的前后方向上的间距也可以相同。
47.为了提升飞行器1飞行过程中机体10两侧受力的均等性,可选地,如图5所示,机体10左侧的多个旋翼20与机体10右侧的多个旋翼20关于机体10的中心轴线对称。由于位于机体10左侧的多个旋翼20和位于机体10右侧的多个旋翼20是关于机体10的中心轴线对称的,
这样,位于机体10左右两侧的旋翼20的数量相同、设置在机体10上的位置相对,且在飞行器1飞行过程中,左右两侧的旋翼20所产生的升力、推力也一致,进一步提升飞行器1在飞行过程中的稳定性及平衡性。
48.可选地,如图3-图5所示,飞行器1还可以包括旋翼安装臂40,旋翼安装臂40的一端连接于机体10,旋翼安装臂40的另一端设置有用于安装转轴21的安装面41,安装面41与机体10所在的平面成角度设置,且安装面41与机体10所在的平面之间的夹角角度与转轴21的轴线p与机体10所在的平面之间的夹角α的角度相同。由于旋翼20的转轴21安装在旋翼安装臂40的安装面41上,因此,当需要对旋翼20的倾斜角度进行调整时,例如,可以仅对安装面41的角度进行调整,或者,也可以通过调整旋翼安装臂40与机体10所在的平面之间的夹角的角度进行调整,进而间接达到调整安装面41的倾斜角度的目的。
49.此外,旋翼降噪结构30可以具有任意适当的形状,例如,如图5、图6所示,旋翼降噪结构30形成为圆环状结构,圆环状结构的圆心与转轴21的轴线p重合,翼片22位于圆环状结构的内侧。由于旋翼降噪结构30形成为圆环状结构,在翼片22转动过程中带动旋翼降噪结构30转动,旋翼降噪结构30不会对旋翼20产生的升力造成影响,并能够减小翼片22的振动,并能起到保护翼片22的作用。在其他实施方式中,旋翼降噪结构30也可以形成为椭圆形、三角形、多边形、v形、弧形等,本公开对旋翼降噪结构30的具体形状不作限定,只要旋翼降噪结构30能够起到连接多个翼片22的翼尖的作用即可。
50.可选地,旋翼降噪结构30可以由碳纤维材料制成。碳纤维且具有高刚度、高抗拉强度、低重量、高耐化学性、耐高温和低热膨胀等优点,能够应对飞行器1在飞行过程中的各种情形。
51.在本公开提供的一种实施方式中,可选地,旋翼降噪结构30可以与翼片22一体成型。旋翼降噪结构30与翼片22一体成型可以使得翼片22与旋翼降噪结构30之间具有更大的连接强度,避免在翼片22转动时,翼片22与旋翼降噪结构30的连接处发生松动,断裂等情况。
52.在本公开提供的另一种实施方式中,旋翼降噪结构30与翼片22也可以是通过螺栓螺母、焊接等连接方式固定连接。
53.可选地,为了进一步便于飞行器1的垂直起飞,如图7所示,在本公开提供的一种实施方式中,飞行器1还可以包括连接于机体10的起落架50,起落架50可以包括位于机体10下方的支撑部51,支撑部51具有用于支撑在水平地面上的支撑面510,支撑面510与机体10所在的平面成角度设置,且支撑面510垂直于转轴21的轴线p,以使在支撑面510支撑在水平地面上时,转轴21的轴线p能够与水平地面垂直。当支撑面510支撑在水平地面上时,支撑面510与水平地面接触的平面与水平面平行,从而使机体10所在的平面与水平面成角度,转轴21的轴线p与水平面垂直,这样在飞行器1起飞时,由于转轴21的轴线p与水平面垂直,旋翼20在转动过程中,能产生垂直于水平面的升力,从而实现飞行器1的垂直起飞。
54.在本公开提供的其他实施方式中,如图8所示,本公开所提供的飞行器1也可以通过斜坡平台100实现垂直升降,具体的,斜坡平台100具有用于支撑飞行器1的支撑斜面101,当将飞行器1放置在支撑斜面101上时,转轴21的轴线p能够与水平面垂直,这样,旋翼20在转动过程中能产生垂直于水平地面的升力,从而实现飞行器1的垂直起飞。
55.为了避免飞行器1从斜坡平台100上滑落,如图8所示,还可以在斜坡平台100上设
置限位结构102,在本公开提供的一种实施方式中,限位结构102可以为活动设置在支撑斜面101下边缘的限位挡板,限位挡板可以止挡位于支撑斜面101上的飞行器1的机轮上。
56.或者,在本公开提供的另一种实施方式中,在支撑斜面101上也可以形成有多个向内凹陷的限位槽,当飞行器1置于支撑斜面101上时,飞行器1的机轮至少部分地嵌入在限位槽内,从而实现对飞行器1的限位。
57.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
58.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
59.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1