一种双旋翼无人机的制作方法
1.本实用新型涉及双旋翼无人机技术领域,尤其涉及一种双旋翼无人机。
背景技术:
2.当前的小型无人机多为四旋翼布局,飞行效率较低,对续航和载重量具有不利影响。
3.因此,如何设计一种具有较高的飞行效率的无人机,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提供一种双旋翼无人机,以提高无人机的飞行效率。
5.为了实现上述目的,本实用新型提供了如下技术方案:
6.一种双旋翼无人机,包括:
7.机臂;
8.飞行组件,所述飞行组件的数量为两个,分别设置于所述机臂的两端,所述飞行组件包括旋翼、电机、偏转支座和舵机,所述旋翼与所述电机的输出轴连接,所述电机设置于所述偏转支座,所述舵机的输出轴与所述偏转支座连接,以使所述舵机带动所述偏转支座转动,并且所述偏转支座的转动中心线平行于第二方向设置;以及
9.航电控制系统,与所述舵机和所述电机电连接;
10.其中,在所述机体坐标系中,原点为所述机臂的几何中心点,所述第二方向为自所述原点指向所述机臂的第一端的方向,第一方向为在水平面内垂直于第二方向的方向,第三方向为通过右手坐标系规则确定的方向。
11.优选地,在上述双旋翼无人机中,所述电机通过螺栓连接设置于所述偏转支座上。
12.优选地,在上述双旋翼无人机中,所述偏转支座设有连接孔,所述连接孔与所述舵机的输出轴连接。
13.优选地,在上述双旋翼无人机中,所述舵机的输出轴设置有用于对所述偏转支座进行轴向定位的轴向定位件;所述连接孔设有周向定位凸起,所述舵机的输出轴设有与所述周向定位凸起配合的周向定位凹槽。
14.优选地,在上述双旋翼无人机中,还包括设置于所述机臂上的起落架。
15.优选地,在上述双旋翼无人机中,所述起落架包括设置于所述机臂上的第一支腿、第二支腿、第三支腿和第四支腿,所述第一支腿和所述第二支腿位于所述原点的一侧,且所述第一支腿和所述第二支腿呈八字形设置,所述第三支腿和所述第四支腿位于所述原点的另一侧,所述第三支腿和所述第四支腿呈八字形设置。
16.优选地,在上述双旋翼无人机中,所述旋翼包括第一桨叶和第二桨叶,所述第一桨叶和所述第二桨叶间隔180
°
设置。
17.优选地,在上述双旋翼无人机中,所述航电控制系统包括控制器和电池。
18.优选地,在上述双旋翼无人机中,所述航电控制系统设置于所述机臂的中部。
19.使用本实用新型所提供的双旋翼无人机时,由于机臂的两端均设置飞行组件,飞行组件包括旋翼、电机、偏转支座和舵机,旋翼与电机的输出轴连接,电机设置于偏转支座,舵机的输出轴与偏转支座连接,因此,通过电机能够驱动旋翼转动,通过舵机能够带动偏转支座绕其转动中心线转动;当需要使该双旋翼无人机绕第一方向转动时,通过航电控制系统改变机臂两端的电机转速,使两个电机产生转速差动后,该双旋翼无人机产生绕第一方向的转动力矩,使该双旋翼无人机绕第一方向进行偏转;当需要使该双旋翼无人机绕第二方向转动时,通过航电控制系统控制舵机,使舵机控制机臂两端的偏转支座同时绕其各自的转动中心线同向转动,使得机臂两端的电机和旋翼同时向该侧偏转倾斜,由于偏转支座的转动中心线平行于第二方向设置,因此,该双旋翼无人机能够绕第二方向进行偏转;当需要使该双旋翼无人机绕第三方向转动时,通过航电控制系统控制舵机,使舵机控制机臂两端的偏转支座绕其各自的转动中心线反向转动,使得机臂两端的电机产生绕第三方向的转动力矩,该转动力矩使该双旋翼无人机绕第三方向转动。由此可见,本实用新型实施例所提供的双旋翼无人机采用两只旋翼进行飞机,通过对两只旋翼和电机的偏转进行飞行控制,较现有的四旋翼无人机,具有较高的飞行效率,延长了无人机的续航时长,提高了无人机的载重能力;同时,该双旋翼无人机较现有的四旋翼无人机具有较小的外廓尺寸,便于携带。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
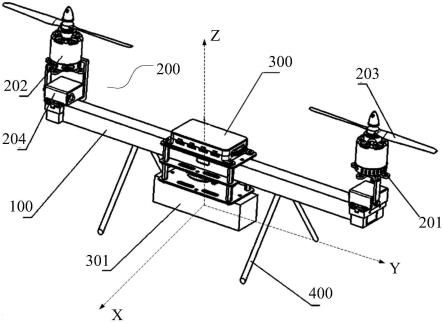
21.图1为本实用新型实施例所提供的一种双旋翼无人机的结构示意图;
22.图2为本实用新型实施例所提供的一种双旋翼无人机通过两侧电机差动实现绕第一方向转动的示意图;
23.图3为本实用新型实施例所提供的一种双旋翼无人机绕第二方向转动的控制示意图;
24.图4为本实用新型实施例所提供的一种双旋翼无人机绕第三方向转动的控制示意图。
25.其中,100为机臂,200为飞行组件,201为偏转支座,202为电机,203为旋翼,204为舵机,300为航电控制系统,301为电池,400为起落架,x为第一方向,y为第二方向,z为第三方向。
具体实施方式
26.由背景技术描述可知,当前的小型无人机多为四旋翼布局,飞行效率较低,而为提高飞行效率,单纯将四旋翼布局改为双旋翼布局,则无法使双旋翼无人机实现飞行控制,因此,如何实现对双旋翼无人机的飞行控制,是提高飞行效率的关键。
27.有鉴于此,本实用新型的核心在于提供一种双旋翼无人机,以提高无人机的飞行
效率。
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.如图1至图4所示,本实用新型实施例公开了一种双旋翼无人机,包括机臂100、飞行组件200和航电控制系统300。
30.其中,飞行组件200的数量为两个,分别设置于机臂100的两端,飞行组件200的数量为两个,分别设置于机臂100的两端,飞行组件200包括旋翼203、电机202、偏转支座201和舵机204,旋翼203与电机202的输出轴连接,电机202设置于偏转支座201,舵机204的输出轴与偏转支座201连接,以使舵机204带动偏转支座201转动,并且偏转支座201的转动中心线平行于第二方向y设置;航电控制系统300与舵机204和电机202电连接;在机体坐标系中,原点为机臂100的几何中心点,第二方向y为自原点指向机臂100的第一端的方向,第一方向x为在水平面内垂直于第二方向y的方向,第三方向z为通过右手坐标系规则确定的方向。
31.使用本实用新型所提供的双旋翼无人机时,由于机臂100的两端均设置飞行组件200,飞行组件200包括旋翼203、电机202、偏转支座201和舵机204,旋翼203与电机202的输出轴连接,电机202设置于偏转支座201,舵机204的输出轴与偏转支座201连接,因此,通过电机202能够驱动旋翼203转动,通过舵机204能够带动偏转支座201绕其转动中心线转动;当需要使该双旋翼无人机绕第一方向x转动时,通过航电控制系统300改变机臂100两端的电机202转速,使两个电机202产生转速差动后,该双旋翼无人机产生绕第一方向x的转动力矩,使该双旋翼无人机绕第一方向x进行偏转;当需要使该双旋翼无人机绕第二方向y转动时,通过航电控制系统300控制舵机204,使舵机204控制机臂100两端的偏转支座201同时绕其各自的转动中心线同向转动,使得机臂100两端的电机202和旋翼203同时向该侧偏转倾斜,由于偏转支座201的转动中心线平行于第二方向y设置,因此,该双旋翼无人机能够绕第二方向y进行偏转;当需要使该双旋翼无人机绕第三方向z转动时,通过航电控制系统300控制舵机204,使舵机204控制机臂100两端的偏转支座201绕其各自的转动中心线反向转动,使得机臂100两端的电机202产生绕第三方向z的转动力矩,该转动力矩使该双旋翼无人机绕第三方向z转动。由此可见,本实用新型实施例所提供的双旋翼无人机采用两只旋翼203进行飞机,通过对两只旋翼203和电机202的偏转进行飞行控制,较现有的四旋翼无人机,具有较高的飞行效率,延长了无人机的续航时长,提高了无人机的载重能力;同时,该双旋翼无人机较现有的四旋翼无人机具有较小的外廓尺寸,便于携带。
32.应当理解,上述电机202可以与偏转支座201通过螺栓、卡槽或者卡箍等类型的紧固件连接在一起,只要是能够满足使用要求的连接方式均属于本实用新型保护范围内;可选地,本实用新型实施例所提供的电机202通过螺栓连接设置于所述偏转支座201上,结构简单,便于安装。
33.进一步地,偏转支座201设有连接孔,连接孔与舵机204的输出轴连接,以通过航电控制系统300控制舵机204的输出轴转动至预设角度,通过连接孔和输出轴的配合使得偏转支座201能够随舵机204的输出轴一起发生转动。
34.应当理解,上述偏转支座201可以通过在舵机204的输出轴上设置定位轴套、定位
轴肩或者定位块等轴向定位件实现轴向定位,只要是能够实现偏转支座201轴向定位的方式均属于本实用新型保护范围内。
35.另外,上述连接孔设有周向定位凸起,舵机204的输出轴设有与周向定位凸起配合的周向定位凹槽,以通过定位凸起和定位凹槽的配合限制偏转支座201的周向晃动,防止因偏转支座201的周向晃动导致电机202和旋翼203发生偏转误差,影响偏转精度和偏转稳定性。
36.本实用新型所提供的双旋翼无人机还包括设置于机臂100上的起落架400,以保证该双旋翼无人机的平稳起降。
37.具体地,起落架400包括设置于机臂100上的第一支腿、第二支腿、第三支腿和第四支腿,第一支腿和第二支腿位于原点的一侧,且第一支腿和第二支腿呈八字形设置,第三支腿和第四支腿位于原点的另一侧,第三支腿和第四支腿呈八字形设置,以稳定支撑该双旋翼无人机。
38.进一步地,旋翼203包括第一桨叶和第二桨叶,第一桨叶和第二桨叶间隔180
°
设置,以使该双旋翼无人机具有较小的外廓尺寸,便于携带。
39.上述航电控制系统300包括控制器和电池301,以通过控制器实现对舵机204和电机202的控制功能,通过电池301向该双旋翼无人机的电子元器件供电。
40.并且,上述航电控制系统300设置于机臂100的中部,以使该双旋翼无人机受力平衡。
41.本实用新型的说明书和权利要求书及上述附图中的术语“第一”和“第二”等是用于区别不同的对象,而不是用于描述特定的顺序。此外术语“包括”和“具有”以及他们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有设定于已列出的步骤或单元,而是可包括没有列出的步骤或单元。
42.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1