环形多工位抓取装置的制作方法
1.本技术涉及机械加工技术技术领域,尤指一种环形多工位抓取装置。
背景技术:
2.目前手机金属外观件进行工装时需要多工位工装,每个工位的组装内容和方式差异较大,通用的工装底座没法满足加工需求,使得每个工位需用到不同类型的工装底座,因此不同的工位间需要进行产品转移。目前的产品转移通常采用人工方式实现,人工方式需要较多的人员参与,使得生产成本较高;另外,人工方式效率较低,操作工程中难免出现误操作,易产生不良品。
3.鉴于此,实有必要提供一种新的环形多工位抓取装置。
技术实现要素:
4.鉴于此,有必要提供一种多工位切换效率高且使用方便的环形多工位抓取装置。
5.为解决上述技术问题,本技术提供了一种环形多工位抓取装置,包括公转基板、自转转盘、旋转电机和多个滑轨机构;所述公转基板与所述自转转盘间隔相对设置,所述旋转电机固定于所述公转基板上且所述旋转电机的转轴与所述自转转盘固定连接,所述旋转电机转动以带动所述自转转盘相对所述公转基板转动;每个所述滑轨机构包括滑轨、与所述滑轨滑动连接的固定座和传动杆,所述滑轨固定于所述公转基板上;所述传动杆的一端与所述固定座转动连接,另一端与所述自转转盘转动连接;所述自转转盘相对所述公转基板转动以带动所述传动杆转动,进而带动所述固定座在所述滑轨上往复移动。
6.优选地,所述环形多工位抓取装置还包括还包括旋转组件;所述旋转组件包括旋转平台和连接筒,所述连接筒的两端分别与所述旋转平台及所述公转基板背离所述自转转盘的表面固定连接,所述旋转平台转动以带动所述公转基板转动。
7.优选地,所述公转基板包括基盘及自所述基盘边缘水平延伸形成的多个翅板;所述基盘呈圆形,所述多个翅板均匀分布于所述基盘的边缘;所述自转转盘呈圆形并与所述基盘、所述旋转平台同轴设置,所述旋转电机部分收容于所述连接筒中且所述旋转电机固定于所述基盘的圆心位置,所述旋转电机的转轴穿过所述基盘并固定连接于所述自转转盘的圆心位置。
8.优选地,所述多个滑轨机构分别一一对应并固定于所述多个翅板上;每个所述滑轨机构还包括底座,所述底座包括抵接连接于所述翅板上的底板和垂直固定于所述底板上的挡板;所述滑轨固定于所述底板上并通过所述底板与所述翅板固定连接,所述滑轨呈长条形且与所述基盘的直径所在的直线重合。
9.优选地,所述环形多工位抓取装置还包括多个抓取机构,所述多个抓取机构分别一一对应并固定连接一个滑轨机构;所述抓取机构包括连接板、抓取组件和抓取气缸,所述抓取气缸固定于所述连接板上并与所述抓取组件固定连接,所述抓取气缸伸缩以带动所述抓取组件靠近或者远离所述连接板;所述连接板固定于所述固定座的一端,以在所述固定
71;支撑柱-72;罩体-80;顶板-81;筒体-82;卡孔-821。
具体实施方式
23.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。
24.请参照图1至图4,本技术提供一种环形多工位抓取装置100,包括公转基板10、自转转盘20、旋转电机30和多个滑轨机构40。
25.其中,所述公转基板10与所述自转转盘20间隔相对设置,所述旋转电机30固定于所述公转基板10上且所述旋转电机30的转轴与所述自转转盘20固定连接,所述旋转电机30转动以带动所述自转转盘20相对所述公转基板10转动。
26.每个所述滑轨机构40包括滑轨41、与所述滑轨41滑动连接的固定座42和传动杆43,所述滑轨41固定于所述公转基板10上。所述传动杆43的一端与所述固定座42转动连接,另一端与所述自转转盘20转动连接。所述自转转盘20相对所述公转基板10转动以带动所述传动杆43转动,进而带动所述固定座42在所述滑轨41上往复移动。
27.进一步的,所述环形多工位抓取装置100还包括旋转组件50。所述旋转组件50包括旋转平台51和连接筒52,所述连接筒52的两端分别与所述旋转平台51及所述公转基板10背离所述自转转盘20的表面固定连接,所述旋转平台51转动以带动所述公转基板10转动,进而带动固定于所述公转基板10上的多个滑轨机构40转动。
28.本实施例中,所述公转基板10包括基盘11及自所述基盘11边缘水平延伸形成的多个翅板12。所述基盘11呈圆形,所述多个翅板12均匀分布于所述基盘11的边缘。所述自转转盘20呈圆形并与所述基盘11、所述旋转平台51同轴设置,所述旋转电机30部分收容于所述连接筒52中且所述旋转电机30固定于所述基盘11的圆心位置,所述旋转电机30的转轴穿过所述基盘11并固定连接于所述自转转盘20的圆心位置。本实施方式中,所述旋转电机30可以正向或者反向旋转,以带动所述固定座42在所述滑轨41上往复运动。
29.其中,所述基盘11与所述旋转平台51同轴设置,以带动所述多个翅板12同角度转动;所述自转转盘20呈圆形与所述基盘11同轴转动,使得转动连接于所述自转转盘20上的传动杆43同方向、同角度移动,进而使得所述固定座42在所述滑轨41上等距离滑动。
30.其中,所述多个滑轨机构40分别一一对应并固定于所述多个翅板12上,每个翅板12对应一个工位。每个所述滑轨机构40还包括底座44,所述底座44包括抵接连接于所述翅板12上的底板441和垂直固定于所述底板441上的挡板442。所述滑轨41固定于所述底板441上并通过所述底板441与所述翅板12固定连接,使得所述固定座42能够伸出所述翅板12。所述挡板42的设置,防止所述固定座42滑动超出所述滑轨41的最大行程。所述滑轨41呈长条形且与所述基盘11的直径所在的直线重合,使得所述固定座42在所述滑轨41上远离或者靠近所述基盘11圆心。
31.所述环形多工位抓取装置100还包括多个抓取机构60,所述多个抓取机构60分别一一对应并固定连接一个滑轨机构40。所述抓取机构60包括连接板61、抓取组件62和抓取气缸63,所述抓取气缸63固定于所述连接板61上并与所述抓取组件62固定连接,所述抓取气缸63伸缩以带动所述抓取组件62靠近或者远离所述连接板61。所述连接板61固定于所述
固定座42的一端,以使所述抓取机构60在所述固定座42的带动下沿所述滑轨41往复移动。
32.其中,所述抓取组件62包括固定板621和固定于所述固定板621上的多个吸盘622,所述抓取气缸63远离所述连接板61的一端与所述固定板621固定连接。所述多个吸盘622吸附待抓取件实现对所述待抓取件的固定,进而实现所述抓取组件62对所述待抓取件的固定。
33.所述环形多工位抓取装置100还包括固定盘组件70,所述固定盘组件70包括固定盘71和多个支撑柱72。所述固定盘71、所述自转转盘20分别与所述基盘11间隔设置且所述自转转盘20位于所述固定盘71与所述基盘11之间。所述固定盘71呈圆形且所述固定盘71的直径大于所述自转转盘20的直径。每个所述支撑柱72的两端分别与所述固定盘71、所述基盘11固定连接,使得所述固定盘72与所述基盘11固定连接。所述支撑柱72的设置,既满足所述固定盘72与所述基盘10固定,使得所述固定盘72相对所述基盘10静止,又不影响所述传动杆43的小范围移动。
34.进一步的,所述抓取组件62还包括与多个吸盘522连通的气路管线623和与所述抓取气缸63连通的电路管线624。所述气路管线623远离所述吸盘522的一端、所述电路管线624远离所述抓取气缸63的一端固定于所述固定盘71朝向所述基盘11的表面上,使得所述气路管线623和所述电路管线624相对所述基盘11静止,以防止转动过程中所述气路管线623和所述电路管线624发生缠绕等问题,并使得线路整齐、规范。
35.所述抓取机构60还包括多个控制结构64,所述多个控制结构64分别对应并控制一个抓取机构60。所述控制结构64固定于所述固定盘71背离所述基盘11的表面上且所述控制结构64分别与对应的所述气路管线623、所述电路管线624连通,以实现对对应的所述吸盘522、所述抓取气缸63的控制。
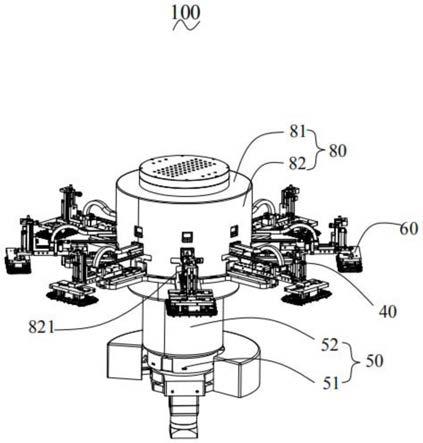
36.所述环形多工位抓取装置100还包括罩体80,所述罩体80包括顶板81及自所述顶板81边缘延伸形成的的筒体82。所述筒体82呈圆柱状且直径对应于所述基盘11的直径,所述筒体82远离所述顶板81的一端与所述基盘11固定连接。所述筒体82远离所述顶板81的一端开设有多个卡孔821,所述多个卡孔821分别与所述多个翅板12相对应,进而使得滑轨机构40的传动杆43、所述气路管线623和所述电路管线624能够穿过对应的卡孔821。所述罩体80的设置,用于隔离保护所述公转基板10、自转转盘20、旋转电机30、固定盘组件70。
37.工作时,所述旋转平台51带动所述公转基板10旋转一定角度,由于本实施例中所述翅板12的数量为八个,故所述旋转平台51带动所述公转基板10旋转45
°
,使得每个翅板12上的抓取机构60能够移动至相邻工位所在的位置,然后所述旋转电机30正转带动所述自转转盘20正转,以带动转动连接于所述自转转盘20上的传动杆43移动,进而带动所述固定座42及固定于所述固定座42上的抓取机构60远离所述基盘10的圆心位置。然后所述抓取机构60中的抓取气缸63在所述控制结构64的控制伸出,使得所述固定板621远离对应连接板61,也即使所述固定板621靠近所述待抓取件。接着所述多个吸盘622在所述控制结构64的控制下吸附所述待抓取件,所述抓取气缸63在所述控制结构64的控制缩回,使得所述固定板621靠近对应连接板61。
38.再接着所述所述旋转平台51带动所述公转基板10旋转45
°
,所述抓取气缸63在所述控制结构64的控制伸出,且所述多个吸盘622在所述控制结构64的控制下松开所述待抓取件。然后所述旋转电机30反转带动所述自转转盘20反转,以带动转动连接于所述自转转
盘20上的传动杆43移动,进而带动所述固定座42及固定于所述固定座42上的抓取机构60靠近所述基盘10的圆心位置,方便所述待抓取件的加工。待所述待抓取件加工完成,重复上述过程,循环往复。
39.本技术提供的环形多工位抓取装置100,通过所述旋转平台51带动所述公转基板10转动,实现多工位之间的切换;通过所述旋转电机30带动所述自转转盘20相对所述基盘11转动,实现所述抓取机构60的抓取与放开。本技术提供的环形多工位抓取装置100,多工位切换效率高且使用方便。
40.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1