卷筒取放装置的制作方法
1.本发明涉及一种卷筒取放装置,尤指本体二侧的支架上设置有夹爪装置,并由摆动机构带动举升机构与夹爪组呈一角度偏摆,举升机构带动夹爪组伸缩位移,以及夹爪组呈现闭合或张开状态自动完成对卷筒进行夹取或放置的动作。
背景技术:
2.现今科技与信息的快速发展,使得市面上各种电子产品或设备不断地推陈出新,并于电子产品或设备内部大都会设置有供电子零组件构装的印刷电路板(pcb),即可通过不同功能或作用的电子零组件搭载印刷电路板构成的电子电路,使电子产品或设备能够发挥其本身具备的功能,而随着电路板的运用更加地广泛,也使得相关的制程设备厂商更加积极投入研究与开发。
3.一般电路板依其柔软度可分为硬板及软板;若依其形状可分为单面板、双面板及多层板;若以材质来区分,则包括有纸基材铜箔基板、复合基板、玻璃纤维布铜箔基板、软质或硬质铜箔基板、陶瓷基板、金属基板、热塑性基板等,而电路板的制程中铜箔基板(ccl)是不可或缺的关键性基础材料,系利用绝缘纸、玻璃纤维布或其他纤维材料经树脂含浸后得到的半固化粘合片(prepreg,也称胶片)与铜箔迭合,于高温、高压下成形的积层板,其中该粘合胶片与铜箔在未加工前,是以连续卷绕的方式分别收卷形成一卷筒或料带,并经过裁切的流程后,便可将粘合胶片迭加在一起加温到一定范围,并压合固化成所需厚度的基板,且该基板可单面或双面覆铜后,再层压固化形成一铜箔基板。
4.随着传统片对片(sheet-to-sheet)材料处理制程的改进和自动化卷对卷(roll-to-roll)制程技术的发展,使电路板的生产不断进步,不但可满足应用端的升级需求,还可确保高品质的合格率和产出,并在电子产品功能需求增加下,使电路设计将日趋于复杂,电路板所需的层数也将越来越多,其中铜箔基板对电路板影响最大,肩负着电路板的导电、绝缘及支撑等功能,且因铜箔是制造铜箔基板的关键原料,为了因应电路板层数或面积加大,铜箔的使用量也将大幅提高,惟该铜箔制造完成后系利用收卷机构卷绕形成一铜箔卷筒,并搬运至分切机分切成客户所需的质量、幅宽、卷重、二端整齐的铜箔,以供应电路板的制程使用。
5.传统铜箔卷筒进行搬运的过程中,由现场作业员来操作起重机具,以吊挂的方式先将铜箔卷筒吊起,并移动至暂存架或分切机的放卷机构上方,再放置于枕垫或放卷架的轴座上,但此铜箔卷筒的重量高达数公吨,不仅吊挂的过程中需要有多名现场作业员协同作业,并于铜箔卷筒吊起或对位放置时必须很缓慢,以避免铜箔卷筒产生晃动或脱落等,对于现场作业员仍具有一定危险性,同时影响整体的工作效率,即为从事于此行业者所亟欲研究改善的方向所在。
技术实现要素:
6.故,发明人有鉴于上述缺失,乃搜集相关资料,经由多方的评估及考量,并以从事
于此行业累积的多年经验,持续的试作与修改,始设计出此种卷筒取放装置的发明专利诞生。
7.为实现上述目的,本发明采用的技术方案是:
8.一种卷筒取放装置,其特征在于,包括:
9.一本体,具有底座,并于该底座二侧处都设有相对的支架,且二支架上分别设有轴部;
10.一设置于该二支架的轴部上的夹爪装置,其包含二夹爪组、二举升机构及二摆动机构,其中该二夹爪组的夹爪座上分别枢接有二活动夹爪,以及用于带动该二活动夹爪呈现闭合或张开状态来对一卷筒中的放卷轴进行夹取或释放的第一驱动部,该二举升机构分别具有结合于该夹爪座上的伸缩滑台,以及用于带动该伸缩滑台使该夹爪组伸出或缩回的第二驱动部,而该二摆动机构则分别具有同轴安装于该轴部上并与该伸缩滑台连结的摆动元件,以及用于带动该摆动元件以连动该举升机构与该夹爪组呈一角度偏摆对该卷筒进行夹取或放置在一暂存架上的第三驱动部。
11.所述的卷筒取放装置,其中,该夹爪装置的夹爪组的二活动夹爪分别具有夹臂,并于该夹臂上设有枢接部,且该夹臂一侧处设有夹持部,再于该夹臂的另一侧处设有连接部,而该第一驱动部的马达则连结有主动轮及从动轮,并于该从动轮侧表面的轴心二侧处连结有一对分别与该连接部枢接的连接杆,用于带动该二活动夹爪以该枢接部为轴心而连动二夹持部呈现闭合或张开状态。
12.所述的卷筒取放装置,其中,该夹爪组在二活动夹爪的夹持部分别呈凹弧状,并于该二夹持部相对内侧处形成有一夹持空间。
13.所述的卷筒取放装置,其中,该夹爪装置在举升机构的伸缩滑台具有底板,并于该底板二侧处分别活动组装有与该夹爪座结合的线性滑轨,且该底板下方处结合有固定座,而该伸缩滑台的固定座上则设置有第二驱动部的马达,并由该马达连结位于二线性滑轨间的螺杆,用以带动该夹爪座沿着该二线性滑轨向外伸出位移或缩回。
14.所述的卷筒取放装置,其中,该夹爪装置在摆动机构的摆动元件下方中央处设有同轴穿过该轴部再连结于该伸缩滑台上的转轴,并于该摆动元件上方至少一侧处枢接有活动件,而该第三驱动部则设置有至少一支油压缸,并由该油压缸下方处延伸出的推杆连结于该活动件上。
15.所述的卷筒取放装置,其中,该该摆动元件位于该支架相反于该举升机构的一侧处,并于该摆动元件上方二侧处都枢接有该活动件,而该第三驱动部则设置有二支油压缸,并由该二支油压缸的推杆分别连结于该活动件上。
16.所述的卷筒取放装置,其中,该暂存架布置在该本体侧方位置,并于该暂存架二侧处的立柱上都设有供该卷筒的放卷轴二端定位的枕垫。
17.所述的卷筒取放装置,其中,该暂存架在二枕垫外侧设有相对的倾斜状挡板。
18.本发明的主要优点乃在于本体所具的底座二侧处设有相对的支架,并于二支架的轴部上设置有夹爪装置,且夹爪装置包含夹爪组、举升机构及摆动机构,当卷筒取放装置欲夹取或放置卷筒时,可由二举升机构的第二驱动部来分别带动夹爪组沿着其伸缩滑台向外伸出或缩回,并使二摆动机构的第三驱动部分别推动摆动元件,以连动举升机构与夹爪组随之呈一角度偏摆,且可通过二夹爪组的第一驱动部带动夹爪座上分别枢接的二活动夹爪
呈现闭合或张开状态,以进行夹取或释放卷筒中所穿设的放卷轴,再复归至原始状态,便可自动完成对卷筒夹取或放置的动作,此种卷筒取放装置不需现场作业员操作起重机具,具有高度自动化、提高工作效率及可精简人力成本的效果。
附图说明
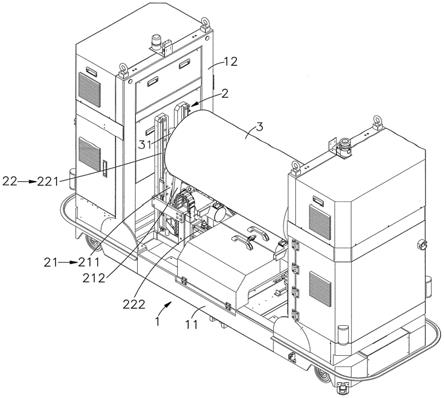
19.图1是本发明较佳实施例的立体外观图。
20.图2是本发明较佳实施例的局部立体外观图。
21.图3是本发明夹爪装置的局部立体外观图。
22.图4是本发明夹爪组摆动前的动作示意图。
23.图5是本发明夹爪组摆动时的动作示意图。
24.图6是本发明夹爪组闭合时的动作示意图。
25.图7是本发明夹爪组张开时的动作示意图。
26.图8是本发明较佳实施例放料前的动作示意图。
27.图9是本发明较佳实施例放料时的动作示意图。
28.图10是本发明较佳实施例放料后的动作示意图。
29.附图标记说明:1-本体;11-底座;12-支架;121-轴部;2-夹爪装置;21-夹爪组;211-夹爪座;212-活动夹爪;2120-夹持空间;2121-夹臂;2122-枢接部;2123-夹持部;2124-连接部;213-第一驱动部;2131-马达;2132-主动轮;2133-从动轮;2134-连接杆;22-举升机构;221-伸缩滑台;2211-底板;2212-缺口;2213-线性滑轨;2214-固定座;222-第二驱动部;2221-马达;2222-螺杆;23-摆动机构;231-摆动元件;2311-转轴;2312-活动件;232-第三驱动部;2321-油压缸;2322-推杆;3-卷筒;31-放卷轴;4-暂存架;41-立柱;411-枕垫;412-挡板。
具体实施方式
30.为达成上述目的及功效,本发明所采用的技术手段及其构造,兹绘图就本发明的较佳实施例详加说明其构造与功能如下,以利完全了解。
31.请参阅图1~图7所示,分别为本发明较佳实施例的立体外观图、局部立体外观图、夹爪装置的局部立体外观图、夹爪组摆动前的动作示意图、摆动时的动作示意图、闭合时的动作示意图及张开时的动作示意图,由图中可清楚看出,本发明的卷筒取放装置为包括有本体1及安装于本体1上的夹爪装置2,其中:
32.该本体1具有底座11,并于底座11前后二侧处都设有相对的支架12,且二支架12上分别设有一轴部121,而本体1的底座11较佳实施为一车架,并于车架上安装有传动装置、转向系统、液压装置及驱动控制系统等,其中驱动控制系统可通过传动装置带动车轮,并由转向系统配合电磁或光学自动导引依设定的行驶路径移动,以构成一无人搬运车、智慧型导引运输车或其他无人移载台车,但并不以此为限,本体1也可为固定式或移动式料架,以作为支撑使用。
33.该夹爪装置2包含分别设置于本体1的二支架12上的夹爪组21、举升机构22及摆动机构23,并于二夹爪组21的夹爪座211上都枢接有二相对的活动夹爪212,以及用于带动各二活动夹爪212呈现闭合或张开状态的第一驱动部213,而二活动夹爪212的夹臂2121在靠
近中段位置上分别设有枢接部2122,并于夹臂2121一侧处都设有凹弧状的夹持部2123,且各二活动夹爪212在夹持部2123相对内侧处形成有一夹持空间2120,再于夹臂2121的另一侧处设有连接部2124,又第一驱动部213所具的马达2131以减速机连结有齿轮组相互啮合带动的主动轮2132及从动轮2133,并由从动轮2133侧表面的轴心二侧处(如0度与180度)连结有一对分别与连接部2124枢接的连接杆2134。
34.在本实施例中的举升机构22具有结合于夹爪座211相对于活动夹爪212另一侧处的伸缩滑台221,并于伸缩滑台221的底板2211上方中央处向内开设有缺口2212,且缺口2212二侧处分别活动组装有与夹爪座211结合的线性滑轨2213,再于底板2211下方处结合有供夹爪组21收容于其内的中空框体状固定座2214,而伸缩滑台221的固定座2214上则设置有第二驱动部222的马达2221,并由马达2221以减速机配合传动机构连结有位于二线性滑轨2213间的螺杆2222,且螺杆2222上螺接的螺帽为结合于夹爪座211上。
35.此外,摆动机构23包含分别同轴安装于支架12的轴部121上的摆动元件231,以及用于带动摆动元件231呈一角度偏摆的第三驱动部232,其中该摆动元件231为概呈一上宽下窄的角锥板状,较佳实施位于支架12相对于举升机构22的另一侧处,但并不以此为限,也可将二摆动元件231分别设置于支架12与举升机构22之间,且摆动元件231下方中央处设有水平的转轴2311,便可将摆动元件231的转轴2311分别穿过轴部121的轴孔中,再连结于伸缩滑台221的底板2211上,而摆动元件231上方至少一侧处则枢接有活动件2312,并由活动件2312连结有第三驱动部232至少一支油压缸2321下方处延伸出的推杆2322,若是摆动机构23以单边偏摆(如向左或向右)为说明时,第三驱动部232只需设置一支油压缸2321来推动与拉回摆动元件231,而在以下说明书内容中,则是以双边偏摆为说明,并于摆动元件231上方二侧处分别枢接有活动件2312,再由二活动件2312上分别连结有第三驱动部232的油压缸2321,且二油压缸2321之间为形成一夹角设置,合予陈明。
36.请搭配参阅图8~图10所示,分别为本发明较佳实施例放料前的动作示意图、放料时的动作示意图及放料后的动作示意图,由图中可清楚看出,本发明的卷筒取放装置为适用于一卷筒3,并由夹爪装置2将卷筒3进行夹取或放置的动作,而卷筒3较佳实施可为一铜箔卷筒,并于卷筒3中穿设的放卷轴31上卷绕有铜箔,但并不以此为限,其卷料除了可以是铜箔之外,也可依加工制程的不同(如镀膜、镀层或层压等),选用纸、胶膜、布或其他长形且薄片状的可挠性材料。
37.在本实施例中,若是卷筒取放装置的本体1是以一无人搬运车为说明时,可在无人搬运车的行驶路径上设置有至少一个暂存架4,并于暂存架4二侧处的立柱41上都设有v型或u型枕垫411,以及二枕垫411外侧相对的倾斜状挡板412,但并不以此为限,也可在指定的工站设置有分切机或其他加工机具,并由夹爪装置2来将卷筒3予以夹取后,使无人搬运车可自动导引行驶至暂存架4或工站侧方位置,再将卷筒3平稳的放置在暂存架4或加工机具的放卷架上,便可凭借自动化卷对卷制程来提高生产的速度,也可依实际的应用变更实施,故在本案以下的说明书内容中都一起进行说明,合予陈明。
38.请参阅如图3~图7所示,当本发明的卷筒取放装置欲将卷筒3放置于暂存架4上时,可由举升机构22的第二驱动部222以马达2221驱动螺杆2222呈一转动,并带动夹爪组21的夹爪座211可沿着伸缩滑台221的线性滑轨2213向外伸出位移,以连带将卷筒3作举升的动作,同时凭借摆动机构23的第三驱动部232以第一支油压缸2321分别推动摆动元件231的
活动件2312,使摆动元件231以转轴2311为轴心在支架12的轴部121上朝第一支油压缸2321方向(左方或右方)呈一角度偏摆,同时也使举升机构22与夹爪组21随之呈一角度偏摆,且第二支油压缸2321随着第一支油压缸2321作动而偏摆,便可将卷筒3的放卷轴31二端通过暂存架4二立柱41上的挡板412的轴向导引,使放卷轴31确实的定位至枕垫411上形成一置中,以顺利将卷筒3放置在暂存架4上,再由夹爪组21的第一驱动部213以马达2131驱动主动轮2132使从动轮2133呈一角度旋转,并带动其一对连接杆2134随之偏摆作动,同时凭借二活动夹爪212的连接部2124以枢接部2122为轴心,以连动二夹持部2123呈现张开状态,即可释放卷筒3的放卷轴31,且待举升机构22的第二驱动部222带动伸缩滑台221使夹爪组21缩回、摆动机构23的第三驱动部232推动摆动元件231复归至原始状态,便可依照上述的放置方式,完成将卷筒3放置在暂存架4上的动作。
39.此外,当夹爪装置2欲夹取暂存架4上放置的卷筒3时,可由摆动机构23的第三驱动部232带动摆动元件231,并连动举升机构22与夹爪组21朝暂存架4方向呈一角度偏摆,同时使举升机构22的第二驱动部222带动伸缩滑台221,以连动夹爪座211将夹爪组21向外伸出,且可通过第一驱动部213先带动二活动夹爪212呈现张开状态,使卷筒3的放卷轴31二端分别进入二夹持部2123间所形成的夹持空间2120内,再由第一驱动部213带动二活动夹爪212呈现闭合状态后,便可完成夹取卷筒3的动作,如此一来,可由摆动机构23的第三驱动部232以第一支油压缸2321配合第二支油压缸2321推动与拉回摆动元件231,达到省力及稳定的拉回作动的效果,使夹爪组21复归至原始状态,同时凭借举升机构22的第二驱动部222带动伸缩滑台221缩回后,便可完成将卷筒3放置在本体1二支架12上的动作,此种卷筒取放装置不需现场作业员操作起重机具进行卷筒3搬运、夹取与放置等作业,即可减少传统吊挂卷筒3或对位放置的过程中所耗费的工时与成本,具有高度自动化、提高工作效率及可精简人力成本的效果。
40.以上说明对本发明而言只是说明性的,而非限制性的,本领域普通技术人员理解,在不脱离权利要求所限定的精神和范围的情况下,可作出许多修改、变化或等效,但都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1