一种码垛机械手的制作方法
1.本发明涉及机械手技术领域,具体涉及一种码垛机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
3.现有码垛机械手在对纸箱进行码垛时,利用两个夹板夹住纸箱再对纸箱进行移动,这种方式存在的不足有:当夹板对纸箱夹的过紧使,会使夹坏纸箱,进而可能损坏纸箱内的物品;当夹板对纸箱夹的不够紧时,纸箱可能会从夹板内壁滑落,进而摔坏纸箱内的物品。
4.因此,发明一种码垛机械手很有必要。
技术实现要素:
5.为此,本发明提供一种码垛机械手,通过设置,解决了上述现有。
6.为了实现上述目的,本发明提供如下技术方案:一种码垛机械手,包括驱动装置和夹持装置,所述夹持装置固定安装在所述驱动装置上;所述驱动装置包括支撑台,所述支撑台上开设有放置槽,所述放置槽内设有配重块,所述支撑台顶部固定安装电机箱,所述电机箱内部固定安装伺服电机一,所述伺服电机一输出端固定连接转轴,所述电机箱顶部固定安装驱动箱,所述转轴通过轴承固定连接电机箱的顶部和驱动箱的底部,所述转轴顶部固定安装转盘,所述转盘顶部固定安装滑杆,所述滑杆外壁套接驱动块,所述驱动块顶部固定连接电动伸缩杆一,所述转轴外壁通过轴承固定连接加强板,所述驱动块右端固定连接滑轨,所述滑轨上开设有滑槽和矩形通孔,所述滑轨内部左端设有伺服电机二,所述伺服电机二输出端固定连接丝杆,所述丝杆外壁螺纹连接滑块,所述滑块底部固定连接电动伸缩杆二;所述夹持装置包括矩形支架,所述矩形支架内部设有电动伸缩杆三,所述电动伸缩杆三底部固定连接提杆,所述提杆底部固定连接驱动板,所述驱动板两端底部活动连接拉杆,所述拉杆远离所述驱动板的一端活动连接夹板,所述夹板顶端活动连接矩形支架底部,右端所述夹板外壁固定安装支撑架,所述支撑架内部设有电动伸缩杆四,所述夹板底端固定连接电动伸缩杆五,所述电动伸缩杆五一端固定安装u形支架,所述u形支架内壁固定安装转动锟。
7.优选的,所述电动伸缩杆一顶部通过螺栓固定安装在连接杆上,所述连接杆顶部通过轴承固定连接所述驱动箱内壁顶部,所述加强板两端固定安装在所述驱动箱内壁上。
8.优选的,所述放置槽上方设有操作面板,所述操作面板上设有控制伺服电机一、电动伸缩杆一、伺服电机二、电动伸缩杆二、电动伸缩杆三、电动伸缩杆四和电动伸缩杆五的控制按钮。
9.优选的,所述电动伸缩杆二底部固定连接所述矩形支架,所述支撑台底部固定安装驱动轮。
10.优选的,所述驱动箱上开设有缺口,所述滑杆顶部固定连接连接杆。
11.优选的,所述驱动装置还包括矩形槽,所述驱动块右端开设有所述矩形槽,所述矩形槽内壁固定连接所述滑轨,所述驱动块右端和所述滑轨左端通过螺栓进行固定。
12.本发明的有益效果是:通过驱动轮将本装置移动到码垛附近,对纸箱进行码垛时,伺服电机一通过转轴驱动转盘旋转,转盘带动滑杆旋转,从而带动驱动块旋转,最终驱动块带动滑轨旋转至滑轨位于纸箱的上方,伺服电机二输出端驱动丝杆旋转,丝杆驱动滑块移动至夹持装置位于纸箱的正上方,电动伸缩杆二伸长驱动夹板底部贴地,左端电动伸缩杆五伸长至左端支撑板抵住纸箱,电动伸缩杆四伸长推动纸箱上部,在左端支撑板的作用下,纸箱右端抬起,右端电动伸缩杆五伸长将右端的支撑板插入纸箱右端底部,左端电动伸缩杆五再驱动左端支撑板运到到纸箱左端底部,电动伸缩杆三收缩,拉动驱动板向上移动,拉动驱动板拉动拉杆运动,拉杆拉动夹板夹住纸箱,支撑板伸入到纸箱底部,对纸箱进行支撑,使得夹板无需对纸箱夹持的太紧,避免了将纸箱和纸箱内部的物品夹坏,夹板对纸箱进行夹持,使得纸箱在移动过程中不会掉落,增加了安全性;电动伸缩杆二收缩将纸箱抬起,通过伺服电机一带动纸箱旋转,以及伺服电机二带动纸箱平移,以及电动伸缩杆二对纸箱的升降,将纸箱运输到垛上,两组电动伸缩杆五收缩,使支撑板脱离纸箱底部,电动伸缩杆三伸长带动驱动板向下运动,拉杆顶部向下运动带动夹板运动至释放纸箱,完成对纸箱的码垛;两端电动伸缩杆五驱动支撑板脱离纸箱底部的过程中,纸箱底部在u形支架上的转动锟上滚动,使得纸箱底部不会产生较大摩擦力,不会对纸箱底部产生较大磨损,在一定范围内,实现了纸箱的旋转、平移和升降,能将纸箱输送到任意位置,码垛效率大大提高。
附图说明
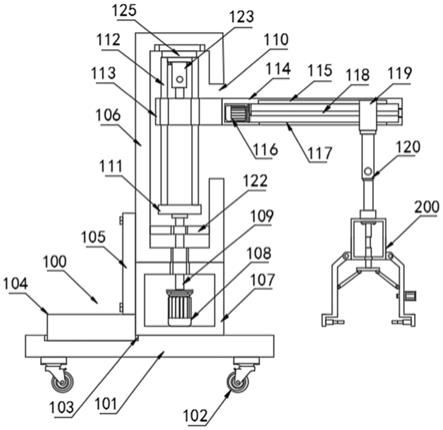
13.图1为本发明实施例1提供的结构示意图;图2为本发明实施例1提供的夹持装置的结构示意图;图3为本发明实施例1提供的u形支架的俯视图;图4为本发明实施例2提供的驱动块与滑轨的连接示意图。
14.图中:驱动装置100、夹持装置200、支撑台101、驱动轮102、放置槽103、配重块104、操作面板105、驱动箱106、电机箱107、伺服电机一108、转轴109、缺口110、转盘111、滑杆112、驱动块113、滑轨114、滑槽115、伺服电机二116、矩形通孔117、丝杆118、滑块119、电动伸缩杆二120、矩形槽121、加强板122、电动伸缩杆一123、连接杆125、矩形支架201、提杆202、夹板203、电动伸缩杆三204、驱动板205、拉杆206、电动伸缩杆四207、支撑架208、支撑板209、电动伸缩杆五210、转动锟211、u形支架212。
具体实施方式
15.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
16.实施例1:参照说明书附图1-3,该实施例的一种码垛机械手,包括驱动装置100和夹持装置200;进一步地,驱动装置100包括支撑台101、驱动轮102、放置槽103、配重块104、操作面板105、驱动箱106、电机箱107、伺服电机一108、转轴109、缺口110、转盘111、滑杆112、驱动块113、滑轨114、滑槽115、伺服电机二116、矩形通孔117、丝杆118、滑块119、电动伸缩杆二120、矩形槽121、加强板122、电动伸缩杆一123和连接杆125,具体的,所述支撑台101上开设有放置槽103,所述放置槽103内设有配重块104,所述支撑台101顶部固定安装电机箱107,所述电机箱107内部固定安装伺服电机一108,所述伺服电机一108输出端固定连接转轴109,所述电机箱107顶部固定安装驱动箱106,所述转轴109通过轴承固定连接电机箱107的顶部和驱动箱106的底部,所述转轴109顶部固定安装转盘111,所述转盘111顶部固定安装滑杆112,所述滑杆112外壁套接驱动块113,所述驱动块113顶部固定连接电动伸缩杆一123,所述转轴109外壁通过轴承固定连接加强板122,所述驱动块113右端固定连接滑轨114,所述滑轨114上开设有滑槽115和矩形通孔117,所述滑轨114内部左端设有伺服电机二116,所述伺服电机二116输出端固定连接丝杆118,所述丝杆118外壁螺纹连接滑块119,所述滑块119底部固定连接电动伸缩杆二120,所述电动伸缩杆一123顶部通过螺栓固定安装在连接杆125上,所述连接杆125顶部通过轴承固定连接所述驱动箱106内壁顶部,所述加强板122两端固定安装在所述驱动箱106内壁上,所述放置槽104上方设有操作面板105,所述操作面板105上设有控制伺服电机一108、电动伸缩杆一123、伺服电机二116、电动伸缩杆二120、电动伸缩杆三204、电动伸缩杆四207和电动伸缩杆五210的控制按钮,所述电动伸缩杆二120底部固定连接所述矩形支架201,所述支撑台101底部固定安装驱动轮102,所述驱动箱106上开设有缺口110,所述滑杆112顶部固定连接连接杆125;驱动轮102的作用是便于本装置的移动,放置槽103的作用是放置配重块104,限制配重块104的移动,便于配重块104的放置和拆除,伺服电机一108设置为jsf 57-15-30-bf-1000,伺服电机一108的作用是驱动转盘111旋转,实现驱动滑轨114旋转,滑杆112的作用是使得驱动块113能够稳定地上升和下降,滑槽115的作用是使滑块119能够稳定左右运动,电动伸缩杆二120的作用是驱动夹持装置200上升和下降,电动伸缩杆一123作用是驱动、驱动块113上升和下降,电动伸缩杆一123和电动伸缩杆二120均设置为ynt-03。
17.进一步地,夹持装置200包括矩形支架201、提杆202、夹板203、电动伸缩杆三204、驱动板205、拉杆206、电动伸缩杆四207、支撑架208、电动伸缩杆五210、转动锟211、u形支架212,具体的,所述矩形支架201内部设有电动伸缩杆三204,所述电动伸缩杆三204底部固定连接提杆202,所述提杆202底部固定连接驱动板205,所述驱动板205两端底部活动连接拉杆206,所述拉杆206远离所述驱动板205的一端活动连接夹板203,所述夹板203顶端活动连接矩形支架201底部,右端所述夹板203外壁固定安装支撑架208,所述支撑架208内部设有电动伸缩杆四207,所述夹板203底端固定连接电动伸缩杆五210,所述电动伸缩杆五210一端固定安装u形支架212,所述u形支架212内壁固定安装转动锟211;电动伸缩杆三204的作用是带动驱动板205上升和下降,电动伸缩杆四207作用是将纸箱上端推起,电动伸缩杆五
的作用是驱动支撑板209移动到纸箱底部,电动伸缩杆三204、电动伸缩杆四207和电动伸缩杆五210均设置为ynt-03。
18.实施场景具体为:在使用本发明时,通过驱动轮102将本装置移动到码垛附近,对纸箱进行码垛时,伺服电机一108通过转轴109驱动转盘111旋转,转盘111带动滑杆112旋转,从而带动驱动块113旋转,最终驱动块113带动滑轨114旋转至滑轨114位于纸箱的上方,伺服电机二116输出端驱动丝杆118旋转,丝杆118驱动滑块119移动至夹持装置200位于纸箱的正上方,电动伸缩杆二120伸长驱动夹板203底部贴地,左端电动伸缩杆五210伸长至左端支撑板209抵住纸箱,电动伸缩杆四207伸长推动纸箱上部,在左端支撑板209的作用下,纸箱右端抬起,右端电动伸缩杆五210伸长将右端的支撑板209插入纸箱右端底部,左端电动伸缩杆五210再驱动左端支撑板209运到到纸箱左端底部,电动伸缩杆三204收缩,拉动驱动板205向上移动,拉动驱动板205拉动拉杆206运动,拉杆206拉动夹板203夹住纸箱,电动伸缩杆二120收缩将纸箱抬起,通过伺服电机一108带动纸箱旋转,以及伺服电机二116带动纸箱平移,以及电动伸缩杆二120对纸箱的升降,将纸箱运输到垛上,两组电动伸缩杆五210收缩,使支撑板209脱离纸箱底部,电动伸缩杆三204伸长带动驱动板205向下运动,拉杆206顶部向下运动带动夹板203运动至释放纸箱,完成对纸箱的码垛。
19.实施例2:参照说明书附图4,与实施例1不同的是:所述驱动装置100还包括矩形槽121,所述驱动块113右端开设有所述矩形槽121,所述矩形槽121内壁固定连接所述滑轨114,所述驱动块113右端和所述滑轨114左端通过螺栓进行固定;实施场景具体为:相比于实施例1,在使用本发明时,通过驱动轮102将本装置移动到码垛附近,对纸箱进行码垛时,伺服电机一108通过转轴109驱动转盘111旋转,转盘111带动滑杆112旋转,从而带动驱动块113旋转,最终驱动块113带动滑轨114旋转至滑轨114位于纸箱的上方,伺服电机二116输出端驱动丝杆118旋转,丝杆118驱动滑块119移动至夹持装置200位于纸箱的正上方,电动伸缩杆二120伸长驱动夹板203底部贴地,左端电动伸缩杆五210伸长至左端支撑板209抵住纸箱,电动伸缩杆四207伸长推动纸箱上部,在左端支撑板209的作用下,纸箱右端抬起,右端电动伸缩杆五210伸长将右端的支撑板209插入纸箱右端底部,左端电动伸缩杆五210再驱动左端支撑板209运到到纸箱左端底部,电动伸缩杆三204收缩,拉动驱动板205向上移动,拉动驱动板205拉动拉杆206运动,拉杆206拉动夹板203夹住纸箱,电动伸缩杆二120收缩将纸箱抬起,通过伺服电机一108带动纸箱旋转,以及伺服电机二116带动纸箱平移,以及电动伸缩杆二120对纸箱的升降,将纸箱运输到垛上,两组电动伸缩杆五210收缩,使支撑板209脱离纸箱底部,电动伸缩杆三204伸长带动驱动板205向下运动,拉杆206顶部向下运动带动夹板203运动至释放纸箱,完成对纸箱的码垛,滑轨114通过螺栓固定安装在驱动块113上的矩形槽121内壁,方便了滑轨114与驱动块113的拆除和安装。
20.以上所述,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1