绕管下料机构的制作方法
[0001]
本发明涉及绕管下料机构,属于自动化设备技术领域。
背景技术:
[0002]
一些长度较长的产品(耳机、医用导管等),包装前需要卷绕成圈以免产品打结,但是绕管后包装前的运输过程中产品很容易散开,散开后需要重新绕管,浪费时间,包装效率低。
技术实现要素:
[0003]
本发明的目的是针对已有技术的缺点,提供一种自动夹取和移动绕管产品的绕管下料机构。
[0004]
为实现目的本发明采用的技术方案是:
[0005]
绕管下料机构,包括前横向移动组件、第二纵向移动组件和若干组绕管夹爪组件,所述前横向移动组件以及第二纵向移动组件带动所述绕管夹爪组件移动,所述绕管夹爪组件包括夹爪驱动机构、第一绕管夹指和第二绕管夹指,所述第一绕管夹指的底部制有第一绕管夹取槽,所述第二绕管夹指的底部制有第二绕管夹取槽,所述第一绕管夹取槽和所述第二绕管夹取槽相对设置,所述夹爪驱动机构带动所述第一绕管夹指和第二绕管夹指夹取已绕管产品。
[0006]
作为对上述技术方案的进一步优化:所述第一绕管夹指上还制有夹指定位凸块,所述第二绕管夹指上还制有与所述夹指定位凸块对应的夹指定位孔。
[0007]
作为对上述技术方案的进一步优化:所述前横向移动组件包括第二夹爪平移板以及固定在机架台上的前上料顶板,所述前上料顶板上安装有若干条前上料滑轨,所述前上料滑轨上设置有第二前上料滑块,所述第二夹爪平移板底部的两端固定在所述第二前上料滑块上,所述前横向移动组件还包括设置在所述前上料顶板上的前直线电机,所述前直线电机上设置有前直线移动块,所述前直线电机带动所述前直线移动块移动,所述前直线移动块与所述第二夹爪平移板相连接。
[0008]
作为对上述技术方案的进一步优化:所述第二纵向移动组件包括第二升降电机,所述第二升降电机连接有第二升降滑杆,所述第二升降电机带动所述第二升降滑杆移动,所述第二升降滑杆的底部穿过所述第二夹爪平移板以及前上料顶板并连接有第二夹爪固定板,所述绕管夹爪组件与所述第二夹爪固定板相连接。
[0009]
作为对上述技术方案的进一步优化:所述第二夹爪平移板上还设置有若干第二升降导滑套,所述第二升降导滑套内穿设有第二升降导柱,所述第二升降导柱的底部固定在所述第二夹爪固定板上。
[0010]
作为对上述技术方案的进一步优化:所述夹爪驱动机构为电动夹指或夹爪气缸。
[0011]
作为对上述技术方案的进一步优化:所述电动夹指包括夹取电缸,所述夹取电缸上设置有两块夹指滑块,所述夹取电缸上制有夹指滑轨,所述夹指滑轨的两侧制有夹指移
动槽,所述夹指滑块上制有滑轨槽,所述夹指滑轨位于滑轨槽内,所述夹指滑块上还制有夹指移动块,所述夹指移动块位于所述夹指移动槽内。
[0012]
与现有技术相比,本发明通过绕管夹爪组件夹取已绕管产品,使得产品因卷绕而重叠在一起的管线部分位于第一绕管夹取槽和第二绕管夹取槽内,防止已绕管产品在运输过程中散开;再通过前横向移动组件、第二纵向移动组件带动绕管夹爪组件和产品移动,实现已绕管产品自动下料。
附图说明
[0013]
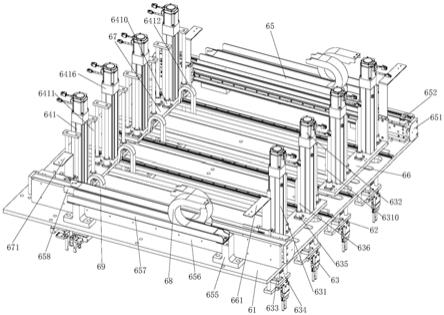
图1是使用了本发明的静脉管绕管装置中前上料机构的立体结构示意图。
[0014]
图2是使用了本发明的静脉管绕管装置中第一升降导滑套的立体结构示意图。
[0015]
图3是使用了本发明的静脉管绕管装置中第一夹爪组件的立体结构示意图。
[0016]
图4是本发明中夹取电缸和夹指滑块配合的立体结构示意图。
[0017]
图5是使用了本发明的静脉管绕管装置中绕管夹爪组件和贴纸夹爪组件的立体结构示意图。
[0018]
图6是使用了本发明的静脉管绕管装置中拉纸气缸的立体结构示意图。
[0019]
图7是使用了本发明的静脉管绕管装置中拉纸滑块的立体结构示意图。
[0020]
图8是使用了本发明的静脉管绕管装置中贴纸夹爪组件的立体结构示意图。
[0021]
图9是使用了本发明的静脉管绕管装置中夹爪电缸的立体结构示意图。
[0022]
图10是使用了本发明的静脉管绕管装置中夹爪活塞杆的立体结构示意图。
[0023]
图11是使用了本发明的静脉管绕管装置的立体结构示意图。
具体实施方式
[0024]
下面结合附图和具体实施方式对本发明作进一步说明。如图1-11所示,一种使用了本发明的静脉管绕管装置,包括传送机构2、前上料机构6、后上料机构7、绕管机构8以及贴纸机构9。传送机构2、绕管机构8和贴纸机构9均安装在机架台上,前上料机构6和后上料机构7通过支撑机架10安装在机架台上。传送机构2负责传送静脉管,前上料机构6和后上料机构7负责夹取传送机构2上静脉管的各段并将其按一定的顺序放置在绕管机构8上,绕管机构8带动静脉管卷绕成圈。前上料机构6还负责夹取已卷绕成圈的静脉管并移至贴纸机构9的上方,贴纸机构9切出条状贴纸,已卷绕成圈的静脉管的其中一段恰好位于条状贴纸的中心,贴纸机构9带动条状贴纸的两端向上运动直到贴纸的两端相向相贴,贴纸完毕后前上料机构6带动静脉管移至下料口。贴纸的目的在于防止卷绕成圈的静脉管在下料时散开。
[0025]
上述技术方案中,如图1所示,前上料机构6包括前横向移动组件,前横向移动组件包括固定在支撑机架10上的前上料顶板61,前上料顶板61上安装有若干条前上料滑轨62。前上料滑轨62上设置有第一前上料滑块和第二前上料滑块。前横向移动组件还包括第一夹爪平移板66以及第二夹爪平移板67,第一夹爪平移板66底部的两端固定在第一前上料滑块上,第二夹爪平移板67底部的两端固定在第二前上料滑块上。前上料顶板61上还安装有若干组带动第一夹爪平移板66和第二夹爪平移板67移动的前平移组件65。本发明中前上料滑轨62共设有4条,第一夹爪平移板66和第二夹爪平移板67均设有两块,前平移组件65共设有两组,每组前平移组件65带动一块第一夹爪平移板和一块第二夹爪平移板移动。前平移组
件65包括前直线电机651,前直线电机651上设置有前直线移动块652。前直线电机651是直接从市场上采购的。前直线移动块652共设两块,两块前直线移动块652分别与第一夹爪平移板66和第二夹爪平移板67固定。前平移组件65还包括固定在前上料顶板61上的两块前平移支撑座655,两块前平移支撑座655之间安装有前平移固定侧板656,前直线电机651安装在前平移固定侧板656上。两块前平移支撑座655之间还安装有第一拖链支板657和第二拖链支板658,第一夹爪平移板66上安装有第一拖链固定板661,第二夹爪平移板67上安装有第二拖链固定板671。第一拖链68的两端分别与第一拖链支板657和第一拖链固定板661相固定,第二拖链69的两端分别与第二拖链支板658和第二拖链固定板671相固定。图1中为了更清楚地显示结构,并未将第一拖链68与第一拖链固定板661相连接,也并未将第二拖链69与第二拖链固定板671相连接。
[0026]
上述技术方案中:前上料机构6还包括四组安装在第一夹爪平移板66上的第一前纵向移动组件,以及四组安装在第二夹爪平移板67上的第二前纵向移动组件。前上料顶板61上制有若干长条形的前移动孔。第一前纵向移动组件包括安装在第一夹爪平移板66上的第一升降传动块631,第一升降传动块631的顶部连接有第一升降电机632,第一升降传动块631的内部设置有第一升降滑杆,第一升降电机632的转轴通过滚珠丝杆带动第一升降滑杆移动,滚珠丝杆的功能是将旋转运动转化成直线运动。第一升降滑杆的底部穿过第一夹爪平移板66以及前移动孔并安装有第一升降连接块633,第一升降连接块633的底部固定有第一夹爪固定板634。第一夹爪平移板66上还设置有若干第一升降导滑套635;如图2所示,第一升降导滑套635包括上导滑部6351、下导滑部6352以及位于两者之间的安装部6353,升降导滑套635内还制有导滑通孔6354,安装部6353固定在第一夹爪平移板66上,下导滑部6352穿过第一夹爪平移板66。导滑通孔6354内穿设有第一升降导柱636。第一升降导柱636的底部固定在第一夹爪固定板634上。第一升降导柱636和升降导滑套635配合对第一夹爪固定板634的移动起到辅助导滑的作用。第一夹爪平移板66上还安装有拖链上连接板,第一夹爪固定板634上还安装有拖链下连接板,第三拖链6310的两端分别固定在拖链上连接板和拖链下连接板上。
[0027]
上述技术方案中:第一夹爪固定板634上设置有第一夹爪调节板637,第一夹爪调节板637上制有两个长条形的夹爪调节孔6371,螺钉穿过夹爪调节孔6371并固定在第一夹爪固定板634的侧面。如图3所示,前上料机构6还包括第一夹爪组件63,第一夹爪组件63包括电动夹爪100,电动夹爪100安装在第一夹爪调节板637上,夹爪调节孔6371使得电动夹爪100可以相对于第一夹爪固定板634移动。电动夹爪100两侧的夹爪活塞杆上分别安装有第一取料夹指638和第二取料夹指639。第一取料夹指638的底部制有第一取料凸块6381,第一取料夹指638上还制有凸出的夹指卡块6382,第二取料夹指639的底部制有第二取料凸块6391,第二取料凸块6391与第一取料凸块6381相对设置,防止第一取料夹指638和第二取料夹指639夹取连接软管的面直接碰撞,将连接软管夹取变形,也防止连接软管从第一取料夹指638和第二取料夹指639之间掉落。第二取料夹指639上还制有与夹指卡块6382对应的夹指卡槽6392。第一取料夹指638和第二取料夹指639负责夹取静脉管中连接有穿刺针接头的连接软管,夹取的位置为连接软管靠近穿刺针接头的端部。夹指卡块6382和夹指卡槽6392的配合对第一取料夹指638和第二取料夹指639的夹取过程进行定位。
[0028]
上述技术方案中:第二前纵向移动组件包括安装在第二夹爪平移板67上的第二升
降传动块641,第二升降传动块641的顶部连接有第二升降电机6416,第二升降传动块641的内部设置有第二升降滑杆,第二升降电机6416的转轴通过滚珠丝杆带动第二升降滑杆移动。第二升降滑杆的底部穿过第二夹爪平移板67以及移动孔并安装有第二升降连接块,第二升降连接块的底部固定有第二夹爪固定板6415。第二夹爪平移板67上还设置有若干第二升降导滑套6410,第二升降导滑套6410的结构与第一升降导滑套635的上述结构相同。第二升降导滑套6410内穿设有第二升降导柱6411。第二升降导柱6411的底部固定在第二夹爪固定板6415上。第四拖链6412的两端分别固定在第二夹爪平移板67和第二夹爪固定板6415上。
[0029]
上述技术方案中:第二夹爪固定板6415的底部安装有三组绕管夹爪组件以及一组贴纸夹爪组件。由于医用导管太长,入袋包装前都需要卷绕成圈,绕管夹爪组件负责夹取绕管后的医用导管。绕管夹爪组件包括固定在第二夹爪固定板6415底部的夹爪固定块6413,夹爪固定块6413上安装有电动夹指400,电动夹指400带动第一绕管夹指647和第二绕管夹指648移动。
[0030]
上述技术方案中:第一绕管夹指647的底部制有第一绕管夹取槽6471,第一绕管夹指647上还制有夹指定位凸块6472,第二绕管夹指648的底部制有第二绕管夹取槽6481,第二绕管夹指648上还制有与夹指定位凸块6472对应的夹指定位孔6482。第一绕管夹指647和第二绕管夹指648负责夹取绕管机构8上完成绕管后的静脉管路,因卷绕而重叠在一起的连接软管位于第一绕管夹取槽6471和第二绕管夹取槽6481内,防止已绕管的静脉管路在运输过程中散开。
[0031]
上述技术方案中:第二夹爪固定板6415上还安装有拉纸固定座6414,拉纸固定座6414上安装有拉纸气缸643,拉纸气缸643上设置有l型的拉纸滑块642,拉纸气缸643带动拉纸滑块642移动。如图6所示,拉纸气缸643内制有两个拉纸活塞杆孔6431。如图7所示,l型拉纸滑块642横向部位的上表面设有拉纸活塞杆6421,拉纸活塞杆6421的端部制有拉纸活塞6422,拉纸活塞6422和拉纸活塞杆6421均位于拉纸活塞孔6431内。拉纸气缸643上还设有导向滑轨6434,导向滑轨6434两侧上制有导向滑动槽6435,拉纸滑块642纵向部位的一侧面上制有导向滑槽6423,导向滑槽6423两侧的槽壁上制有导向滑动条6424。导向滑轨6434位于导向滑槽6423内,导向滑动条6424位于导向滑动槽6435内。拉纸气缸643的外壁上还设有第一限位安装块6436以及限位挡块6437,第一限位安装块6436上制有第一限位安装孔,第一限位安装孔内安装有第一气缸缓冲器6438。拉纸滑块642上制有第二限位安装块6425,第二限位安装块6425上制有第二限位安装孔,第二限位安装孔内安装有第二气缸缓冲器6426,限位挡块6437与第二气缸缓冲器6426配合限制拉纸滑块642的移动距离。第一气缸缓冲器6438和第二气缸缓冲器6426均为现有技术中的缓冲器。
[0032]
上述技术方案中:拉纸滑块642上安装有贴纸夹指连接板6417,贴纸夹指连接板6417的底部安装有贴纸夹爪垫块6418,贴纸夹爪组件包括安装在贴纸夹爪垫块6418底部的贴纸夹爪气爪644。贴纸夹爪气爪644可以直接从市场上采购,贴纸夹爪气爪644内部的结构为现有技术,只是在不同的使用场合对其外部的形状或构造做一些调整。如图8所示,贴纸夹爪气爪644的底部制有贴纸气爪夹指槽6441,贴纸气爪夹指槽6441两槽壁之间安装有两根夹指旋转轴6442,夹指旋转轴6442上设有贴纸夹爪活塞杆6419,贴纸夹爪气爪644内通气后即可带动两个贴纸夹爪活塞杆6419绕着夹指旋转轴6442旋转。两个贴纸夹爪活塞杆6419
上安装有均贴纸夹指649,两个贴纸夹指649相对一侧的底部镶嵌有胶垫6491。其中一组绕管夹爪组件的电动夹指400上安装有压料板6420。
[0033]
上述技术方案中:电动夹爪100包括夹爪电缸101以及位于夹爪电缸101两侧的夹爪活塞杆102,其中夹爪电缸101是直接从市场上采购的,夹爪电缸101内部的结构为现有技术,只是在不同的使用场合对其外部的形状或构造做一些调整。如图9、10所示,夹爪电缸101一端面制有内凹的夹爪滑槽1011,夹爪滑槽1011两侧的槽壁上制有凸出的夹爪导滑条1012,夹爪滑槽1011的槽底制有两个夹爪限位槽1013。夹爪活塞杆102上制有导滑滑脚1021,导滑滑脚1021的两侧面均制有夹爪导滑槽1022,导滑滑脚1021的底部还制有凸出的夹爪限位块1023。导滑滑脚1021位于夹爪滑槽1011内,夹爪导滑条1012位于夹爪导滑槽1022内,夹爪限位块1023位于夹爪限位槽内1013。夹爪滑槽1011槽口的中部还安装有夹爪盖板1014。电动夹爪100也可以采用夹爪气缸等常用的夹爪驱动装置。
[0034]
上述技术方案中:电动夹指400包括夹取电缸401,夹取电缸401上设置有两块夹指滑块402。夹取电缸401上制有夹指滑轨4011,如图4所示,夹指滑轨4011的两侧制有夹指移动槽4012。夹指滑块402上制有滑轨槽,夹指滑轨4011位于滑轨槽内。夹指滑块402上还制有夹指移动块4021。夹指移动块4021位于夹指移动槽4012内。图4为了更清楚地显示结构,省略了其中一个夹指滑块402。
[0035]
本发明的工作过程如下,绕管前,前上料机构6上的第一夹爪组件63下降,第一取料夹指638和第二取料夹指639夹取静脉管,前上料机构6再带动静脉管移至绕管机构上;绕管完毕后,前上料机构6带动三组绕管夹爪组件移至绕管机构的正上方,静脉管由于被卷绕成圈,连接软管重叠在一起,电动夹指400带动第一绕管夹指647和第二绕管夹指647夹取连接软管,重叠在一起的连接软管位于第一绕管夹取槽6471和第二绕管夹取槽6481内。
[0036]
以上只是本发明的其中一个应用场合,其他需要对绕管后的产品进行下料的应用场合均可使用本发明。
[0037]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1