一种多水平摩擦提升系统电梯化运行控制装置的制作方法
1.本发明属于矿山领域,更具体的说涉及一种多水平摩擦提升系统电梯化运行控制装置。
背景技术:
2.公司原有提升设备共45台,其中32台为1.2m绞车,8台为1.6m绞车,2m提升机3台,3m提升机2台。所配备的电控系统为简易电控系统,只具备《金属非金属矿山安全规程》要求的安全闭锁功能。
3.公司为加快深部中段开拓工作,统一开拓提升生产系统开展新巴尔虎右旗荣达矿业有限责任公司铅锌银矿深部资源接替技改工程项目,其中技改副井主要负责全矿的人员、材料及设备,设计与320m中段、200m中段、0m中段、-40m皮带道以及-85m粉矿回收中段连接,副井提升机选择jkmd-2.8
×
4pⅲ(左驱)型多绳摩擦提升机、3500
×
1450双层罐笼配平衡锤提升,选择交流同步直联电动机630kw,56r/min,10kv。采用“交-直-交高压变频同步电机+全数字dsp调节控制+多plc网络控制+上位机诊断与监控+局域网信息互联”的控制模式,实现提升机的全自动电梯化运行,保证安全闭锁可靠,平稳运行。
技术实现要素:
4.本发明结合现场工矿条件分析提升机运行过程速度曲线,完成实际提升机运行的相关参数计算;要求设计的提升机自动控制系统结构简单,故障点少,可靠性高的自动化控制。
5.为了实现上述目的,本发明是通过以下技术方案实现的:所述的深井多水平摩擦提升系统包括电控系统、提升装置、安全保护装置,所述的电控系统同于整个提升装置的运行控制,提升装置用于乘重提升,安全保护装置用于保护整个提升系统的安全,所述的电控系统包括电抗器柜、整流柜、电容柜、逆变柜、变频控制柜、plc主控柜、操作台、上位监控、风冷系统、信号系统,所的高压进线进入电抗器柜,电抗器柜输出端与整流柜连接,整流柜输出端与电容柜连接,电容柜输出端与逆变柜连接,逆变柜输出端与直流电机连接,电容柜另一端电压输出端与变频控制柜连接,变频控制柜电压输出端与交流提升电机电源端连接,变频控制柜控制端与plc主控柜控制信号输出端连接,操作台与plc控制柜的控制端连接,操作台上设置有上位监控。
6.优选的,所述的提升装置包括电梯厢、编码器、位置开关,所述的位置开关安装于提升装置的提升轨道上,位置开关的输出端与电控系统的plc控制柜内的plc电性连接,编码器安装于提升装置的交流提升电机的转轴上,编码器的输出端与plc电性连接,电梯厢内部安装有井筒楼层位置选择键盘,位置选择键盘与plc电性连接,可以选择电梯厢停靠的楼层。
7.优选的,所述的安全保护装置包括立即施闸保护装置、紧急停车保护装置、不允许再次开车保护装置,所述的立即施闸保护装置采用电压互感器与电流互感器作为检测元
件,所述的电压互感器与电流互感器安装于高低压回路、以及变频器回路上;紧急停车保护装置采用温度传感器作为检测元件,电机主轴瓦上安装有温度传感器,温度传感器的信号输出端与plc电信连接;紧急停车保护装置采用电压互感器作为检测元件,安装于主电机电源线上。
8.优选的,所述的电控系统还有井下电控系统部分,井下电控系统采用12芯光缆并形成井下独立通讯环网,每个节点安装有无线路由器,实现无线井下无线网络覆盖。
9.优选的,所述的电控系统还包括远程遥控装置,远程遥控装置通过井下无线网络与plc控制器连接,远程遥控装置分为两部分,一部分为操车遥控区,另一部分为联锁发送区。
10.优选的,所述的上位监控安装有组态软件,组态软件上集成有电控系统图纸、柜内布置图、使用说明书,还能在系统出现故障时,进行报警;按照其实际布置在上位画面中呈现,点击弹出相应元器件作用、常见故障、处理办法、动作条件及图纸中的位置,便于现场检修维护及资料归档工作。
11.优选的,所述的提升装置还设置有全自动换层阻尼摇台精准对罐装置,能够自动补偿因终端载荷变化引起的首绳弹性伸长。
12.本发明有益效果:本发明结合现场工矿条件分析提升机运行过程速度曲线,完成实际提升机运行的相关参数计算;要求设计的提升机自动控制系统结构简单,故障点少,可靠性高的自动化控制,全自动电梯化运行与传统手动开车相比可大幅提高对罐及运行效率。
附图说明
13.图1为控制系统框架图;图2为操作系统plc控制回路电路图;图3为提升装置电控信号系统及plc组态电路图;图4为操车系统及远程遥控系统电路图;图5为自动换层阻尼托罐摇台工作原理图。
14.图中,1 托爪、2 托罐滚轮、3 缓冲机构、4 换层机构、5 搭接摇臂、6 底座。
具体实施方式
15.为了便于本领域一般技术人员理解和实现本发明,现结合附图及具体实施例进一步描述本发明的技术方案。
16.所述的深井多水平摩擦提升系统包括电控系统、提升装置、安全保护装置,所述的电控系统同于整个提升装置的运行控制,提升装置用于乘重提升,安全保护装置用于保护整个提升系统的安全,所述的电控系统包括电抗器柜、整流柜、电容柜、逆变柜、变频控制柜、plc主控柜、操作台、上位监控、风冷系统、信号系统,所的高压进线进入电抗器柜,电抗器柜输出端与整流柜连接,整流柜输出端与电容柜连接,电容柜输出端与逆变柜连接,逆变柜输出端与直流电机连接,电容柜另一端电压输出端与变频控制柜连接,变频控制柜电压输出端与交流提升电机电源端连接,变频控制柜控制端与plc主控柜控制信号输出端连接,操作台与plc控制柜的控制端连接,操作台上设置有上位监控。
17.plc主控柜选用西门子s7-1500双plc主站配et200mp分站组合方式,连接方式采用光纤环网通讯。主控plc的故障自诊断功能,软件(不少于2条)和硬件冗余的安全回路,可编程控制器i/o点冗余20%,以备现场损坏点的更换以及要求添加的其他功能。
18.所述的提升装置包括电梯厢、编码器、位置开关,所述的位置开关安装于提升装置的提升轨道上,位置开关的输出端与电控系统的plc控制柜内的plc电性连接,编码器安装于提升装置的交流提升电机的转轴上,编码器的输出端与plc电性连接,电梯厢内部安装有井筒楼层位置选择键盘,位置选择键盘与plc电性连接,可以选择电梯厢停靠的楼层。实现对提升机滚筒卷径的自动计算,自动校正系统的位置,完成提升机位置闭环控制,位置的多重同步监测、校验等功能。实现提升机全自动电梯化运行,自动精准对罐,提升机房实现无人值守。整个提升系统只需要一名跟罐工进行选择去向、发信号开车、慢动换层等操作,省去中段信号工及绞车司机。
19.所述的安全保护装置包括立即施闸保护装置、紧急停车保护装置、不允许再次开车保护装置,所述的立即施闸保护装置采用电压互感器与电流互感器作为检测元件,所述的电压互感器与电流互感器安装于高低压回路、以及变频器回路上;紧急停车保护装置采用温度传感器作为检测元件,电机主轴瓦上安装有温度传感器,温度传感器的信号输出端与plc电信连接;紧急停车保护装置采用电压互感器作为检测元件,安装于主电机电源线上。
20.高、低压电源断电故障、励磁回路故障、定子回路故障、变频系统故障、提升容器过卷、调节及控制回路故障、制动系统油压故障、提升系统超过最大速度15%及减速段过速10%、2m/s定点过速、钢丝绳滑动超限、错向操作、按下安全制动钮、电源断电、主回路过压、过流、主回路失压等。然后紧急停车的保护:主机轴瓦过热、变压器温度偏高、运行过程中通风机故障、信号电源欠压、液压制动系统油温偏高、液压制动系统油位偏低、闸瓦磨损、闸盘偏摆、弹簧疲劳等。完成本次提升后,不允许再次开车的保护:主电机超温、低压电源漏电、信号电源接地及其它接地故障、室温过高、控制柜温度过高等。
21.所述的电控系统还有井下电控系统部分,井下电控系统采用12芯光缆并形成井下独立通讯环网,每个节点安装有无线路由器,实现无线井下无线网络覆盖。
22.所述的电控系统还包括远程遥控装置,远程遥控装置通过井下无线网络与plc控制器连接,远程遥控装置分为两部分,一部分为操车遥控区,另一部分为联锁发送区。
23.所述的上位监控安装有组态软件,组态软件上集成有电控系统图纸、柜内布置图、使用说明书,还能在系统出现故障时,进行报警;按照其实际布置在上位画面中呈现,点击弹出相应元器件作用、常见故障、处理办法、动作条件及图纸中的位置,便于现场检修维护及资料归档工作。
24.所述的提升装置还设置有全自动换层阻尼摇台精准对罐装置,能够自动补偿因终端载荷变化引起的首绳弹性伸长,采用电控操车全自动一体化技术进行控制。全自动换层阻尼摇台安装在井口及井底0m中段如图5所示,在托爪未收回即上提罐笼时,托爪可剪断限位销,向上翻转退让使罐笼通过。当发生罐笼过放事故时,托爪的托罐力将超过预先设定的蹾罐力,托爪剪断安全销,向下翻转退让,保证罐笼安全通过,解除井底蹾罐隐患。
25.电控操车全自动一体化技术
电控系统应用现场总线技术及工业以太网把井口操车及信号操作台、各中段操车及信号操作台plc归入主控程序,由程序统一运算处理。用以实现提升机全自动开车功能。全自动开车时绞车房可无人值守操作,信号各个中段无需设置信号工,只需要一名跟罐工跟随罐笼进行选择去向、发信号开车、慢动换层等操作。
26.针对由于提升绳有弹性伸长,受终端载荷变化的影响,提升容器瞬间跳动较大情况研究使用自动换层阻尼托罐摇台,当罐笼停稳时被缓冲装置承接并且具有稳罐功能,能够补偿因终端载荷变化引起的首绳弹性伸长,进出车顺利通畅。全自动开车时绞车房可无人值守操作,信号各个中段无需设置信号工,只需要一名跟罐工跟随罐笼进行选择去向、发信号开车、慢动换层等操作。罐笼到位后,可实现罐笼内远程遥控控制操车设备,并具备安全闭锁功能。双补偿功能:下补偿臂补偿450mm提升绳弹性伸长,上搭接臂补偿150mm伸长,保证停罐在600mm内运行正常,可弥补同类产品停罐只能在
±
20mm的不足。锁定功能:保证在600mm内可任意锁定容器,保证容器不反弹。解锁方便,不用反向开动绞车,利用锁罐锁自动解除、释放锁罐力。
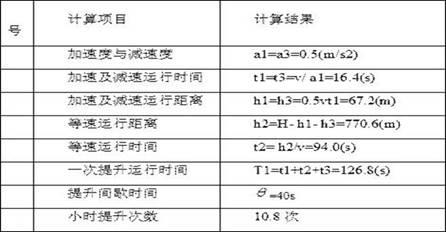
27.提升机运行的相关参数计算结合现场工矿条件分析提升机运行过程速度曲线,完成实际提升机运行的相关参数计算。
28.在每个提升循环中,都要完成从启动、主加速、恒速、主减速、爬行到停车的运行过程。但在设计中视为三阶段速度图,其启动、爬行时间计入休止时间内。计算表如下所示:三阶段提升计算表主加速受力 =1.2
×
37785+63545
×
0.5=77115n匀速阶段受力 =1.2
×
37785=45342n主减速受力 =13569n。
29.实现第一故障捕捉功能及智能化故障预警功能,当提升系统报出多条故障时,能够准确捕捉第一时间发生的故障并弹出可能导致故障发生的原因,便于排查故障。高压变频器实现四象限变频器具有快速加减速特性,能量回馈电网,具备无功补偿功能,功率因数达到0.95以上,经过反复调试,实现零速悬停功能,在启动和停机过程中减少抱闸磨损,有效防止由于闸电配合问题产生的倒转故障。
30.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术
人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1