智能爬架控制器的制作方法
[0001]
本发明属于建筑领域,涉及智能爬架,具体地说是一种智能爬架控制器。
背景技术:
[0002]
爬架又叫提升架,依照其动力来源可分为液压式、电动式、人力手拉式等主要几类,是近年来开发的新型脚手架体系,主要应用于高层剪力墙式楼盘,能沿着建筑物往上攀升或下降,爬架一般是通过智能爬架控制系统来操纵。现有的智能爬架控制系统在运行时一般是使用传统按键进行操作命令使分机进行相应动作,并通过指示灯提示运行信息,无法实时的获取爬架的状态信息,并进行及时的参数调整,而且这种方式在操作时必须在现场进行操作,限制较大,无法处理复杂的命令,因此生产一种智能爬架控制器对于智能爬架控制系统的控制具有重要意义。
技术实现要素:
[0003]
本发明的目的,是要提供一种智能爬架控制器,以实时获取爬架状态信息,并及时调整参数。
[0004]
本发明为实现上述目的,所采用的技术方法如下:一种智能爬架控制器,基于智能爬架控制系统设置,主机与多个从机通信连接,从机通过智能爬架控制器控制爬架的动作,智能爬架控制器包括微处理器、传感器驱动模块、变频器控制模块、通讯模块、电源模块、控制电机的变频器和用于读取爬架状态的传感器,微处理器分别与传感器驱动模块、变频器控制模块、通讯模块和电源模块连接,传感器驱动模块与传感器连接,变频器控制模块与变频器连接,通讯模块与从机连接。
[0005]
作为限定:微处理器采用以stm8s207芯片为核心的电路。
[0006]
作为进一步限定:用于读取爬架状态的传感器包括陀螺仪传感器和拉力传感器。
[0007]
作为再进一步限定:通讯模块采用rs485芯片为核心的电路。
[0008]
作为更进一步限定:变频器包括将交流电整流成直流电的整流模块、将直流电逆变成交流电的逆变器模块和igbt驱动模块,整流模块和igbt驱动模块均与逆变器模块连接。
[0009]
本发明由于采用了上述方案,与现有技术相比,所取得的有益效果是:(1)本发明提供的智能爬架控制器,智能爬架控制系统中的主机可以通过设定的指令控制各从机,进而通过控制智能爬架控制器,控制各个爬架,并且在各个爬架爬升高度、水平角度位移值超出系统阈值时,智能爬架控制器会将爬架的当前状态发送给从机,从机将爬架的当前状态反馈给主机,主机可以重新分配参数给从机,进而调整爬架的状态,能够及时的反映现场的爬架状态,而且能够及时地进行调整,具有稳定可靠的特点;(2)本发明提供的智能爬架控制器,通过微处理器控制变频器控制模块进一步控制变频器,从而控制电机,实现了电机的无级调速控制,延长了设备的正常工作周期和使用寿命,进而提高设备控制水平,同时,节约了能源;
(3)本发明提供的智能爬架控制器通过陀螺仪传感器,检测从机桥架之间的平衡状态,操作方便;综上所述,本发明提供的智能爬架控制器能够及时的反映现场的爬架状态,而且能够及时地进行调整,具有稳定可靠的特点,此外,还延长了设备的正常工作周期和使用寿命,进而提高设备控制水平,而且操作方便,节约了能源。
[0010]
本发明适用于智能爬架控制系统。
附图说明
[0011]
下面结合附图及具体实施例对本发明作更进一步详细说明。
[0012]
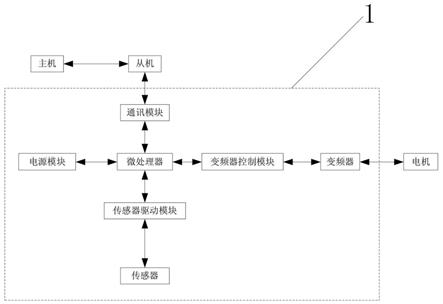
图1为本发明实施例的结构框图;图2为本发明实施例的微处理器的电路原理图;图3为本发明实施例的通讯模块的电路原理图;图4为本发明实施例的电源模块的电路原理图。
具体实施方式
[0013]
下面结合实施例对本发明作进一步说明,但本领域的技术人员应当理解,本发明并不限于以下实施例,任何在本发明具体实施例基础上做出的改进和等效变化,都在本发明权利要求保护的范围之内。
[0014]
实施例 智能爬架控制器一种智能爬架控制器1,其结构框图如图1所示,基于智能爬架控制系统设置,主机与多个从机通信连接,从机通过智能爬架控制器1控制爬架的动作,智能爬架控制器1包括微处理器、传感器驱动模块、变频器控制模块、通讯模块、电源模块、控制电机的变频器和用于读取爬架状态的传感器,微处理器与通讯模块通过uart接口连接,微处理器与电源模块通过电源线连接,微处理器与传感器驱动模块通过iic接口连接,微处理器与变频器控制模块通过io接口连接,变频器控制模块与变频器通过io接口和232接口连接,通讯模块与从机连接。
[0015]
变频器包括将交流电整流成直流电的整流模块、将直流电逆变成交流电的逆变器模块和igbt驱动模块,整流模块和igbt驱动模块均与逆变器模块连接。
[0016]
本实施例中微处理器采用以stm8s207芯片为核心的电路,其电路原理图如图2所示,用于读取爬架状态的传感器包括陀螺仪传感器和拉力传感器,通讯模块采用rs485芯片为核心的电路,其电路原理图如图3所示,电源模块采用12v转5v的供电电路,其电路原理图如图4所示。
[0017]
本实施例的工作原理为:主机向各个从机发送轮询指令,从机通过通讯模块向智能爬架控制器1发起读取指令,传感器驱动模块采集传感器检测的爬架状态,并发送至微处理器,微处理器将爬架状态的信息通过通讯模块发送至从机,各个从机将反馈的爬架状态信息发送至主机,操作人员根据发送至主机中的爬架状态信息,调整参数,重新分配至各个从机,从机通过通讯模块将参数信息发送至微处理器,微处理器根据参数控制变频器驱动模块,进而控制变频器,变频器通过控制电机,进而控制爬架的状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1