一种垃圾分类机器人的制作方法
1.本发明属于垃圾分类技术领域,具体地,涉及一种垃圾分类机器人。
背景技术:
2.垃圾分类是对垃圾收集处置传统方式的改革,是对垃圾进行有效处置的一种科学管理方法。人们面对日益增长的垃圾产量和环境状况恶化的局面,如何通过垃圾分类管理,最大限度地实现垃圾资源利用,减少垃圾处置的数量,改善生存环境状态,是当前世界各国共同关注的迫切问题。
3.现有的垃圾分类装置结构复杂,能耗偏高,且功能不完善,自动化程度低,有待加以改进。
技术实现要素:
4.为了解决上述技术问题,本发明提供了一种垃圾分类机器人,包括外框架,在所述外框架内上部设有垃圾投放斗,中部设有分类皮带机、平移机构和垃圾识别装置,下部设有多个对称布置在平移机构两侧的透明垃圾桶,所述垃圾投放斗的下部设有垃圾投放管道,所述分类皮带机通过平移机构能够在外框架内前后平移,所述垃圾投放管道的出料口和透明垃圾桶的进料口分别与分类皮带机对应设置,所述垃圾识别装置与垃圾投放管道的出料口对应设置,所述分类皮带机的两端设有可驱动分类皮带机正传或反转的第一步进电机,所述平移机构包括与分类皮带机机架相连接的平移带和设置在平移带两侧的导向光轴,所述导向光轴的两端与外框架相连接,且分类皮带机的机架与导向光轴滑动连接,所述平移带的两端设有可驱动平移带正传或反转的第二步进电机,所述外框架的顶部、底部和四周均设有挡板,所述垃圾投放斗的投放口伸至外框架顶部的挡板上方,所述外框架侧部的挡板上设有控制装置,所述控制装置分别与第一步进电机、第二步进电机和垃圾识别装置电连接。
5.优选的,所述控制装置包括树莓派、stm32电路板和24v格氏电池,所述24v格氏电池与stm32电路板电连接,所述树莓派与stm32电路板电连接。本装置以24v格氏电池作为动力源,以树莓派、stm32电路板作为控制核心,结构紧凑,能耗低,自动化程度高。
6.优选的,所述垃圾识别装置包括连接在外框架上的识别架和设于识别架顶部的识别头,所述识别头采用opencv摄像头,所述opencv摄像头与stm32电路板电连接。所述opencv摄像头内置有基于opencv和tensorflow的融合图像软件处理平台,使用时,首先将待分类的垃圾通过opencv摄像头提前训练,然后将训练结果导入树莓派,树莓派根据训练结果与opencv摄像头后期拍摄到的待分类垃圾进行比照分类,再通过对分类皮带机的精确传动控制,实现垃圾的高效精确分类。
7.优选的,所述外壳架内还设有可对透明垃圾桶进行满载监控的红外测距装置,所述红外测距装置与stm32电路板电连接,且与透明垃圾桶的限定收集高度位置相对应。通过红外测距装置,对透明垃圾桶内的垃圾储量进行监控,方便树莓派进行满载参数输入和报
警设置。
8.优选的,所述红外测距装置采用深达威sw
‑
e60测距仪,便于精确监控透明垃圾桶内的垃圾储量。
9.优选的,所述外壳架的侧板上还设有高亮显示屏,所述高亮显示屏与stm32电路板电连接。通过高亮显示屏可播放垃圾分类等宣传片或透明垃圾桶满载报警等信息,实现装置的功能拓展。
10.优选的,所述分类皮带机的传送带上设有可防止垃圾滑落的挡料槽,起到防止垃圾从分类皮带机上滑落的目的。
11.本发明还包括能够使该垃圾分类机器人正常使用的其它装置或组件,均为本领域的常规技术手段;另外,本发明中未加限定的装置和组件均采用本领域中的常规技术手段。
12.本发明的工作原理是,本发明使用时,垃圾投入垃圾投放斗后,经垃圾投放管道的出料口进入分类皮带机时,垃圾识别装置将垃圾信息进行识别后反馈给控制装置,控制装置驱动平移机构动作,使分类皮带机移动到与垃圾类别相对应的透明垃圾桶上方,控制装置进一步根据分类垃圾的可回收或不可回收性控制分类皮带机正转或反转,将相应类别的垃圾进行可回收和不可回收的二次精确分类,通过第一步进电机和第二部件电机的设置,可精确控制分类皮带机的平移距离和正反转距离,从而满足精确分类需要,采用透明垃圾桶方便对垃圾桶内的垃圾储量进行检测,便于实现满载报警设计。
13.本发明的有益效果是,装置结构简单,功能完善,且自动化程度高,能够实现低能耗、高效率的垃圾分类需求。
附图说明
14.下面结合附图和实施例对本发明进一步说明。
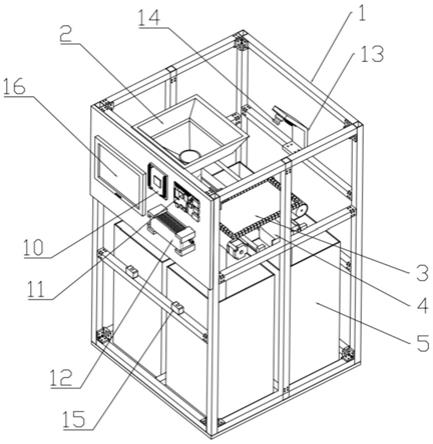
15.图1是本发明实施例中的立体结构示意图。
16.图2是图1中的分类皮带机的结构示意图。
17.图3是图1中的平移机构的结构示意图。
具体实施方式
18.下面结合本发明实施例中的附图以及具体实施例对本发明进行清楚地描述,在此处的描述仅仅用来解释本发明,但并不作为对本发明的限定。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
19.实施例
20.如图1~3所示,本发明提供了一种垃圾分类机器人,包括矩形结构的外框架1,在所述外框架1内上部设有垃圾投放斗2,中部设有分类皮带机3、平移机构4和垃圾识别装置,下部设有四个对称布置在平移机构4两侧的透明垃圾桶5,所述垃圾投放斗2的下部设有垃圾投放管道,所述分类皮带机3通过平移机构4能够在外框架1内前后平移,所述垃圾投放管道的出料口和透明垃圾桶5的进料口分别与分类皮带机3对应设置,所述垃圾识别装置与垃圾投放管道的出料口对应设置,所述分类皮带机3的两端设有可驱动分类皮带机3正传或反转的第一步进电机6,所述平移机构4包括与分类皮带机3的机架相连接的平移带7和设置在
平移带7两侧的导向光轴8,所述导向光轴8的两端与外框架1相连接,且分类皮带机3的机架与导向光轴8滑动连接,所述平移带7的两端设有可驱动平移带7正传或反转的第二步进电机9,所述外框架1的顶部、底部和四周均设有挡板,所述垃圾投放斗2的投放口伸至外框架1顶部的挡板上方,所述外框架1侧部的挡板上设有控制装置,所述控制装置分别与第一步进电机6、第二步进电机9和垃圾识别装置电连接。
21.所述控制装置包括树莓派10、stm32电路板11和24v格氏电池12,所述24v格氏电池12与stm32电路板11电连接,所述树莓派10与stm32电路板11电连接。本装置以24v格氏电池12作为动力源,以树莓派10、stm32电路11板作为控制核心,结构紧凑,能耗低,自动化程度高。所述垃圾识别装置包括连接在外框架1上的识别架13和设于识别架13顶部的识别头14,所述识别头14采用opencv摄像头,所述opencv摄像头与stm32电路板11电连接。所述opencv摄像头内置有基于opencv和tensorflow的融合图像软件处理平台,使用时,首先将待分类的垃圾通过opencv摄像头提前训练,然后将训练结果导入树莓派10,树莓派10根据训练结果与opencv摄像头后期拍摄到的待分类垃圾进行比照分类,再通过对分类皮带机3的精确传动控制,实现垃圾的高效精确分类。
22.所述外壳架1内还设有可对透明垃圾桶5进行满载监控的红外测距装置15,所述红外测距装置15与stm32电路板11电连接,且与透明垃圾桶5的限定收集高度位置相对应,本实施例中,所述透明垃圾桶5的限定收集高度位置设置在透明垃圾桶5的75%满载负荷高度位置处。通过红外测距装置15,对透明垃圾桶5内的垃圾储量进行监控,方便树莓派10进行满载参数输入和报警设置。所述红外测距装置15采用深达威sw
‑
e60测距仪,便于精确监控透明垃圾桶5内的垃圾储量。所述外壳架1的侧板上还设有高亮显示屏16,所述高亮显示屏16与stm32电路板11电连接。通过高亮显示屏16可播放垃圾分类等宣传片或透明垃圾桶满载报警等信息,实现装置的功能拓展。所述分类皮带机3的传送带上设有可防止垃圾滑落的挡料槽17,起到防止垃圾从分类皮带机3上滑落的目的。
23.本发明的工作原理是,本发明使用时,垃圾投入垃圾投放斗2后,经垃圾投放管道的出料口进入分类皮带机3时,垃圾识别装置将垃圾信息进行识别后反馈给控制装置,控制装置驱动平移机构4动作,使分类皮带机3移动到与垃圾类别相对应的透明垃圾桶5的上方,控制装置进一步根据分类垃圾的可回收或不可回收性控制分类皮带机3正转或反转,将相应类别的垃圾进行可回收和不可回收的二次精确分类,通过第一步进电机6和第二部件电机9的设置,可精确控制分类皮带机3的平移距离和正反转距离,从而满足精确分类需要,采用透明垃圾桶5方便对垃圾桶内的垃圾储量进行检测,便于实现满载报警设计。
24.以上已经描述了本发明的实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的实施例。在不偏离所说明实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1