一种远距离建筑混凝土取料装置的制作方法
1.本发明涉及建筑施工机械技术领域,具体而言,涉及一种远距离建筑混凝土取料装置。
背景技术:
2.混凝土是指由胶结料、颗粒状集料、水以及需要加入的化学外加剂和矿物掺合料按适当比例拌制而成的混合料,或经硬化后形成具有堆聚结构的复合材料,混凝土具有原料丰富,价格低廉,生产工艺简单的特点,因而使其用量越来越大,同时混凝土还具有抗压强度高,耐久性好,强度等级范围宽等特点,因此广泛应用于建筑中,但是目前的建筑工地上都是通过手推车将混凝土运送至工作点,需要人工搬运,这样就会浪费大量的劳动力,同时远距离运输过程中,混凝土长时间静置会逐渐凝固,影响混凝土的浇灌,从而影响工程的质量,因此针对上述问题,需要发明一种远距离建筑混凝土取料装置,在远距离混凝土取料过程中,不断地对混凝土进行搅拌,防止混凝土凝固,保证混凝土的使用质量,使其经长距离输送也不会出现凝固现象,同时取代人工输送的投入,减少了大量的劳动力,施工效率更高。
技术实现要素:
3.为了弥补以上不足,本发明提供了一种远距离建筑混凝土取料装置,旨在改善人工输送投入劳动力大,远距离取料混凝土易凝固影响质量的问题。
4.本发明是这样实现的:
5.一种远距离建筑混凝土取料装置,包括提升机构与取料输送机构。
6.所述提升机构包括第一电机、安装架、第一安装板、丝杆、齿条、与支撑板,所述第一电机固定安装于所述安装架顶部,所述第一安装板与所述安装架侧壁滑动连接,所述丝杆螺纹贯穿于所述第一安装板并与所述第一电机的输出轴键连接,所述齿条固定安装于所述第一安装板,所述支撑板固定安装于所述安装架。
7.所述取料输送机构包括第二电机、第二安装板、连接杆、气缸、第三安装板、抓斗、齿轮、转轴与搅拌杆,所述第二安装板与所述支撑板滑动连接,所述第二电机固定安装于所述第二安装板,所述气缸与所述第二安装板侧面铰接,所述气缸的伸缩杆与所述抓斗外壁铰接,所述第三安装板通过所述连接杆与所述第二安装板固定连接,所述抓斗与所述第三安装板底部铰接,所述转轴转动贯穿于所述第二安装板及所述第三安装板,所述转轴与所述第二电机的输出轴键连接,所述齿轮安装于所述转轴,所述齿轮与所述齿条啮合,所述搅拌杆固定安装于所述转轴。
8.在本发明的一种实施例中,所述抓斗设置有引流槽,所述引流槽于所述抓斗底部内壁等间距布置。
9.在本发明的一种实施例中,所述抓斗设置有爪头,所述爪头固定安装于所述抓斗底部侧壁。
10.在本发明的一种实施例中,所述搅拌杆设置数目为多组,多组所述搅拌杆沿所述转轴两侧等间距布置。
11.在本发明的一种实施例中,所述安装架设置有限位杆,所述限位杆贯穿于所述第一安装板并与所述安装架上下两端固定连接。
12.在本发明的一种实施例中,所述提升机构还包括支撑柱,所述支撑柱固定安装于所述第一安装板底部。
13.在本发明的一种实施例中,所述第二安装板设置有防尘罩,所述防尘罩固定安装于所述第二安装板顶部。
14.在本发明的一种实施例中,所述第三安装设置有高压水枪,所述高压水枪固定安装于所述第三安装板底部。
15.在本发明的一种实施例中,所述齿轮与所述转轴采用键连接。
16.在本发明的一种实施例中,所述支撑板设置有加强筋,所述加强筋两端分别与所述安装架及所述支撑板固定连接。
17.本发明的有益效果是:
18.1、本发明通过上述设计得到的一种远距离建筑混凝土取料装置,使用时,启动气缸,气缸的伸缩杆伸长,带动抓斗转动,两侧抓斗闭合,抓取混凝土,电启动第二电机,第二电机转动带动转轴转动,从而带动搅拌杆转动,对抓斗内的混凝土进行搅拌,同时转轴的转动带动齿轮转动,由于齿轮与齿条啮合,因此带动装载混凝土的抓斗在支撑板上左右滑动,实现混凝土横向运输至施工位置,电启动第一电机,第一电机转动带动丝杆转动,从而带动第一安装板在丝杆上上下移动,从而带动装载混凝土的抓斗上下移动,实现混凝土纵向运输至施工位置,在远距离混凝土取料输送过程中,不断地对混凝土进行搅拌,防止混凝土凝固,保证混凝土的使用质量,使其经长距离输送也不会出现凝固现象,同时取代人工输送,减少了大量的劳动力,且施工效率更高。
19.2、抓斗设置有爪头,爪头与抓斗底部侧壁抓口处固定安装,抓取混凝土时更加轻松省力,减少动力的损耗和对装置器材的磨损。
20.3、提升机构还设置有支撑柱,支撑柱与第一安装板底部固定安装,运输的混凝土体积大,质量大,对第一安装板进行支撑可增加装置的稳定性。
21.4、第三安装板设置有高压水枪,所述高压水枪与第三安装板底部固定安装,可及时冲洗掉抓斗及搅拌杆上沾粘的混凝土,避免混凝土沾粘凝固影响装置使用。
附图说明
22.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
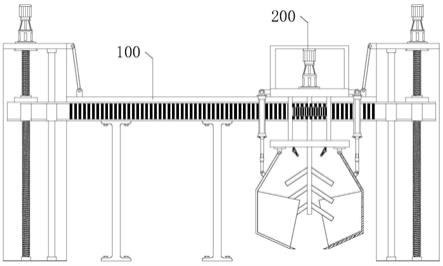
23.图1是本发明实施方式提供的整体结构示意图;
24.图2为本发明实施方式提供的提升机构的结构示意图;
25.图3为本发明实施方式提供的取料输送机构的结构示意图;
26.图4为本发明实施方式提供的抓斗的结构示意图。
27.图中:100
‑
提升机构;110
‑
第一电机;120
‑
安装架;130
‑
第一安装板;140
‑
丝杆;150
‑
限位杆;160
‑
齿条;170
‑
支撑板;171
‑
加强筋;180
‑
支撑柱;200
‑
取料输送机构;210
‑
第二电机;220
‑
第二安装板;221
‑
连接杆;222
‑
防尘罩;230
‑
气缸;240
‑
第三安装板;241
‑
高压水枪;250
‑
抓斗;251
‑
引流槽;252
‑
爪头;260
‑
齿轮;270
‑
转轴;280
‑
搅拌杆。
具体实施方式
28.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
29.实施例1
30.请参阅图1,本发明提供一种技术方案:一种远距离建筑混凝土取料装置,包括提升机构100与取料输送机构200。
31.请参阅图2,提升机构100包括第一电机110、安装架120、第一安装板130、丝杆140、齿条160、与支撑板170,第一电机110固定安装于安装架120顶部,第一安装板130与安装架120侧壁滑动连接,丝杆140螺纹贯穿于第一安装板130并与第一电机110的输出轴键连接,齿条160固定安装于第一安装板130,支撑板170固定安装于安装架120。
32.请参阅图2,提升机构100还包括支撑柱180,支撑柱180固定安装于第一安装板130底部,运输的混凝土体积大,质量大,对第一安装板130进行支撑可增加装置的稳定性。
33.请参阅图2,支撑板170设置有加强筋171,加强筋171两端分别与安装架120及支撑板170固定连接,加强支撑板170的结构强度,装置稳定性增加。
34.请参阅图2,安装架120设置有限位杆150,限位杆150贯穿于第一安装板130并与安装架120上下两端固定连接,提高装置的稳定性。
35.请参阅图3,取料输送机构200包括第二电机210、第二安装板220、连接杆221、气缸230、第三安装板240、抓斗250、齿轮260、转轴270与搅拌杆280,第二安装板220与支撑板170滑动连接,第二电机210固定安装于第二安装板220,气缸230与第二安装板220侧面铰接,气缸230的伸缩杆与抓斗250外壁铰接,第三安装板240通过连接杆221与第二安装板220固定连接,抓斗250与第三安装板240底部铰接,转轴270转动贯穿于第二安装板220及第三安装板240,转轴270与第二电机210的输出轴键连接,齿轮260安装于转轴270,齿轮260与齿条160啮合,搅拌杆280固定安装于转轴270。
36.请参阅图3与图4,抓斗250设置有引流槽251,引流槽251于抓斗250底部内壁等间距布置,卸料时混凝土可更快地从抓斗250中滑出,避免混凝土过多的残留在抓斗250中。
37.请参阅图3与图4,抓斗250设置有爪头252,爪头252固定安装于抓斗250底部侧壁,抓取混凝土时更加轻松省力,减少动力的损耗和对装置器材的磨损。
38.请参阅图3,搅拌杆280设置数目为多组,多组搅拌杆280沿转轴270两侧等间距布置,搅拌更加均匀,提升装置的使用效果。
39.请参阅图3,第三安装板240设置有高压水枪241,高压水枪241固定安装于第三安装板240底部,可及时冲洗掉抓斗250及搅拌杆280上沾粘的混凝土,避免混凝土沾粘凝固影
响装置使用。
40.请参阅图3,齿轮260与转轴270采用键连接,方便更换磨损严重的齿轮260,保持装置持续高效运转。
41.请参阅图3,第二安装板220设置有防尘罩222,防尘罩222固定安装于第二安装板220顶部,避免灰尘堆积对第二电机210产生影响,保持装置平稳运行。
42.实施例2
43.请参阅图1,本发明提供一种技术方案:一种远距离建筑混凝土取料装置,包括提升机构100与取料输送机构200。
44.请参阅图2,提升机构100包括第一电机110、安装架120、第一安装板130、丝杆140、齿条160、与支撑板170,第一电机110固定安装于安装架120顶部,第一安装板130与安装架120侧壁滑动连接,丝杆140螺纹贯穿于第一安装板130并与第一电机110的输出轴键连接,齿条160固定安装于第一安装板130,支撑板170固定安装于安装架120。
45.请参阅图3,取料输送机构200包括第二电机210、第二安装板220、连接杆221、气缸230、第三安装板240、抓斗250、齿轮260、转轴270与搅拌杆280,第二安装板220与支撑板170滑动连接,第二电机210固定安装于第二安装板220,气缸230与第二安装板220侧面铰接,气缸230的伸缩杆与抓斗250外壁铰接,第三安装板240通过连接杆221与第二安装板220固定连接,抓斗250与第三安装板240底部铰接,转轴270转动贯穿于第二安装板220及第三安装板240,转轴270与第二电机210的输出轴键连接,齿轮260安装于转轴270,齿轮260与齿条160啮合,搅拌杆280固定安装于转轴270。
46.请参阅图2,支撑板170设置有加强筋171,加强筋171两端分别与安装架120及支撑板170固定连接,加强支撑板170的结构强度,装置稳定性增加。
47.请参阅图2,安装架120设置有限位杆150,限位杆150贯穿于第一安装板130并与安装架120上下两端固定连接,提高装置的稳定性。
48.请参阅图3,第二安装板220设置有防尘罩222,防尘罩222固定安装于第二安装板220顶部,避免灰尘堆积对第二电机210产生影响,保持装置平稳运行。
49.工作原理:使用时,启动气缸230,气缸230的伸缩杆伸长,带动抓斗250转动,两侧抓斗250闭合,抓取混凝土,电启动第二电机210,第二电机210转动带动转轴270转动,从而带动搅拌杆280转动,对抓斗250内的混凝土进行搅拌,同时转轴270的转动带动齿轮260转动,由于齿轮260与齿条160啮合,因此带动装载混凝土的抓斗250在支撑板170上左右滑动,实现混凝土横向运输至施工位置,电启动第一电机110,第一电机110转动带动丝杆140转动,从而带动第一安装板130在丝杆140上上下移动,从而带动装载混凝土的抓斗250上下移动,实现混凝土纵向运输至施工位置。
50.需要说明的是,第一电机110、第二电机210与气缸230具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。
51.以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1