用于自动扶梯的主轴转速监测系统以及自动扶梯的制作方法
1.本实用新型属于机械传动技术领域,具体涉及用于自动扶梯的主轴转速监测系统。
背景技术:
2.自动扶梯是日常生活中常见的人员运送工具,可用于百货商场、超市、写字楼、宾馆、机场、地铁、都市交通的诸多领域。示例性的自动扶梯的外形及结构例如参见图1所示。
3.实际工程中,需要对自动扶梯的主轴转速进行监测,以满足安全需求或市场需要。通常,在符合相应国家标准要求的基础上,当自动扶梯超速达到1.15倍时,主制动器开始工作,随之制动自动扶梯。当自动扶梯超速达到1.3倍时,辅助制动器则开始工作,随之进一步制动自动扶梯。根据相关要求,必须通过主轴转动和扶手驱动轴来直接测量速度,或者通过测量步进运行速度直接获得自动扶梯的实际运行速度。工程中,将驱动电机的速度或变速箱的输出轴速度转换为自动扶梯的实际运行速度通常是不允许的。
4.通常,现有技术采用如下方法间接获取主轴转速:
5.(a)利用驱动电机的转速来间接换算出主轴转速;或者
6.(b)利用变速箱的输出轴速度来间接换算出主轴转速。可见,上述主轴转速的获取方式均是间接的,测速结果不够准确且不符合用户需求。
7.由此,本实用新型旨在提出一种用于自动扶梯的主轴转速监测系统,该主轴转速监测系统可以直接地、准确地得到自动扶梯的主轴转速。
技术实现要素:
8.本实用新型提出了一种用于自动扶梯的主轴转速监测系统。
9.根据本实用新型的一方面,用于自动扶梯的主轴转速监测系统包括齿轮传动组件,其安装到待测速的主轴,并随着主轴进行转动;旋转编码器,其连接至齿轮传动组件,并接收来自齿轮传动组件的输入;安装座组件,其用于将齿轮传动组件和旋转编码器固定至自动扶梯。
10.根据本实用新型的主轴转速监测系统,优选地,齿轮传动组件包括安装到主轴的第一齿轮,以及与第一齿轮啮合的第二齿轮,其中第一齿轮的分度圆直径大于第二齿轮的分度圆直径。
11.根据本实用新型的主轴转速监测系统,优选地,第一齿轮安装到主轴的轴肩的侧部。
12.根据本实用新型的主轴转速监测系统,优选地,第一齿轮安装到主轴的中间部分。
13.根据本实用新型的主轴转速监测系统,优选地,齿轮传动组件包括输出轴,第二齿轮安装至输出轴。
14.根据本实用新型的主轴转速监测系统,优选地,输出轴连接至旋转编码器的输入轴,以将输出轴的转速传递给旋转编码器。
15.根据本实用新型的主轴转速监测系统,优选地,齿轮传动组件包括轴承壳体,输出轴、旋转编码器的输入轴以及相应的轴承至少部分地包封在轴承壳体中。
16.根据本实用新型的主轴转速监测系统,优选地,安装座组件包括相互连接的安装板和底座,安装板上开设有通孔,旋转编码器的输入轴延伸穿过通孔。
17.根据本实用新型的主轴转速监测系统,优选地,安装座组件的安装板通过第一组腰孔和第一组紧固件安装至底座,以允许安装座组件适应自动扶梯的主轴与横梁之间的不同间距。
18.根据本实用新型的主轴转速监测系统,优选地,安装座组件的底座通过第二组腰孔和第二组紧固件安装至横梁,以允许安装座组件沿主轴的轴向方向的移动。
19.根据本实用新型的主轴转速监测系统,优选地,主轴转速监测系统还包括保护罩组件,保护罩组件至少部分地覆盖齿轮传动组件,从而对齿轮传动组件进行保护。
20.根据本实用新型的主轴转速监测系统,优选地,保护罩组件包括保护罩,保护罩具有弧形段和直线段,弧形段至少部分地在第一齿轮和主轴的上方延伸。
21.根据本实用新型的主轴转速监测系统,优选地,主轴转速监测系统还包括轴承组件,轴承组件具有第一轴承座和第二轴承座。
22.根据本实用新型的主轴转速监测系统,优选地,第一轴承座和第二轴承座中分别安装有第一轴承和第二轴承,主轴套设于第一轴承和第二轴承的轴承孔中。
23.根据本实用新型的主轴转速监测系统,优选地,第一轴承座和第二轴承座中分别安装有第三轴承和第四轴承,齿轮传动组件的输出轴套设于第三轴承和第四轴承的轴承孔中。
24.根据本实用新型的另一方面,一种自动扶梯包括主轴,以及具有前述特征中的一个或多个的主轴转速监测系统。其中,主轴转速监测系统安装到主轴,以获得主轴的转速。
25.根据本实用新型的主轴转速监测系统,传动平稳且系统稳定性高,同时整个系统的运动同步性也更具优势,可以直接、稳定、可靠、准确地获取主轴的转速。
附图说明
26.为了更清楚地说明本实用新型的实施例的技术方案,下面将对实施例的附图作简单地介绍。
27.显而易见地,下面描述中的附图仅仅涉及本实用新型的一些实施例,而非对本实用新型的限制。
28.在附图中:
29.图1是根据本实用新型的自动扶梯的整体示意图;
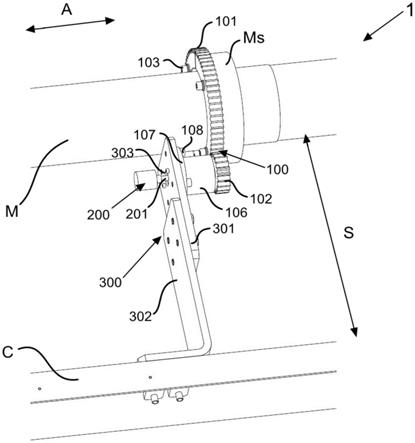
30.图2是根据第一实施例的主轴转速监测系统的示意图,其中示出了齿轮传动组件、旋转编码器和安装座组件等;
31.图3是根据第一实施例的主轴转速监测系统的示意图,其中示出了保护盖组件等;
32.图4是根据第一实施例的主轴转速监测系统的示意图,其中示出了安装座组件和保护盖组件的细节等;
33.图5是根据第二实施例的主轴转速监测系统的示意图,其中示出了齿轮传动组件、旋转编码器和安装座组件等;
34.图6是根据第二实施例的主轴转速监测系统的示意图,其中包括齿轮传动组件和安装座组件的放大视图等;
35.图7是根据第二实施例的主轴转速监测系统的示意图,其中示出了轴承组件等;
36.图8是根据第二实施例的主轴转速监测系统的剖面示意图,其中示出了轴承组件的细节等。
37.附图标记列表
[0038]1ꢀꢀꢀꢀꢀꢀ
主轴转速监测系统
[0039]
100
ꢀꢀꢀꢀ
齿轮传动组件
[0040]
101
ꢀꢀꢀꢀ
第一齿轮
[0041]
102
ꢀꢀꢀꢀ
第二齿轮
[0042]
103
ꢀꢀꢀꢀ
紧固件
[0043]
104
ꢀꢀꢀꢀ
输出轴
[0044]
105
ꢀꢀꢀꢀ
轴承
[0045]
106
ꢀꢀꢀꢀ
轴承壳体
[0046]
107
ꢀꢀꢀꢀ
法兰盘
[0047]
108
ꢀꢀꢀꢀ
紧固件
[0048]
200
ꢀꢀꢀꢀ
旋转编码器
[0049]
201
ꢀꢀꢀꢀ
输入轴
[0050]
300
ꢀꢀꢀꢀ
安装座组件
[0051]
301
ꢀꢀꢀꢀ
安装板
[0052]
302
ꢀꢀꢀꢀ
底座
[0053]
303
ꢀꢀꢀꢀ
通孔
[0054]
304
ꢀꢀꢀꢀ
第一组腰孔
[0055]
305
ꢀꢀꢀꢀ
第一组紧固件
[0056]
306
ꢀꢀꢀꢀ
第二组腰孔
[0057]
307
ꢀꢀꢀꢀ
第二组紧固件
[0058]
400
ꢀꢀꢀꢀ
保护罩组件
[0059]
401
ꢀꢀꢀꢀ
保护罩
[0060]
402
ꢀꢀꢀꢀ
底座板
[0061]
403
ꢀꢀꢀꢀ
弧形段
[0062]
404
ꢀꢀꢀꢀ
直线段
[0063]
405
ꢀꢀꢀꢀ
第三组腰孔
[0064]
406
ꢀꢀꢀꢀ
第三组紧固件
[0065]
407
ꢀꢀꢀꢀ
第四组腰孔
[0066]
408
ꢀꢀꢀꢀ
第四组紧固件
[0067]
409
ꢀꢀꢀꢀ
加强肋
[0068]
500
ꢀꢀꢀꢀ
轴承组件
[0069]
501
ꢀꢀꢀꢀ
第一轴承座
[0070]
502
ꢀꢀꢀꢀ
第二轴承座
[0071]
503
ꢀꢀꢀꢀ
第一轴承
[0072]
504
ꢀꢀꢀꢀ
第二轴承
[0073]
505
ꢀꢀꢀꢀ
第三轴承
[0074]
506
ꢀꢀꢀꢀ
第四轴承
[0075]
m
ꢀꢀꢀꢀꢀꢀ
主轴
[0076]
m
s
ꢀꢀꢀꢀꢀ
轴肩
[0077]
c
ꢀꢀꢀꢀꢀꢀ
横梁
[0078]
s
ꢀꢀꢀꢀꢀꢀ
间距
[0079]
ω
m
ꢀꢀꢀꢀ
主轴转速
[0080]
ω
o
ꢀꢀꢀꢀ
输出轴转速
[0081]
d
a
ꢀꢀꢀꢀꢀ
轴向安装距离
[0082]
d
r
ꢀꢀꢀꢀꢀ
径向安装距离
[0083]
d1ꢀꢀꢀꢀꢀ
第一齿轮的分度圆直径
[0084]
d2ꢀꢀꢀꢀꢀ
第二齿轮的分度圆直径
[0085]
f1ꢀꢀꢀꢀꢀ
第一安装脚
[0086]
f2ꢀꢀꢀꢀꢀ
第二安装脚
具体实施方式
[0087]
为使本实用新型的实施例的目的、技术方案和优点更加清楚,下面将对本实用新型的实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0088]
除非另作定义,本实用新型所使用的技术术语或者科学术语应当为本实用新型所属领域内具有一般技能的人士所理解的通常意义。
[0089]
实施例1
[0090]
如上文所述,示例性的自动扶梯的外形及结构例如参见图1所示。根据本实用新型的主轴转速监测系统1在下文进行具体描述。
[0091]
图2示出了根据本实用新型第一实施例的用于自动扶梯的主轴转速监测系统1的示意图。
[0092]
在第一实施例中,如图2所示,主轴转速监测系统1包括齿轮传动组件100。为获得主轴m的转速ω
m
,齿轮传动组件100可以安装到待测速的主轴m,从而随着主轴m一起进行转动。仍参见图2,齿轮传动组件100包括第一齿轮101和第二齿轮102。其中,第一齿轮101固定连接到主轴m上,并随着主轴m的转动而转动。在第一实施例中,第一齿轮101可以安装在主轴m的侧部。具体如图2,第一齿轮101可以抵靠在主轴m的轴肩m
s
的侧部,且通过一个或多个紧固件103固定到轴肩m
s
的侧部。由此,第一齿轮101可以随着主轴m一起转动,即具有相同的转动角速度,从而可以传递主轴m的转速ω
m
。
[0093]
进一步参考图2,齿轮传动组件100还包括第二齿轮102。根据图2所示,第二齿轮102与第一齿轮101啮合传动,从而将主轴的转速ω
m
经由第一齿轮101而传递给与之啮合的第二齿轮102。在第一实施例中,第一齿轮101的分度圆直径d1可以大于第二齿轮102的分度
圆直径d2。从而,主轴的转速ω
m
通过第一齿轮101到第二齿轮102的传递得到了放大。
[0094]
在第一实施例中,齿轮传动组件100包括与第二齿轮102对应的输出轴104。并且虽在图2中不可见,齿轮传动组件100还包括对应的轴承105。作为可选,轴承105可以置于轴承壳体106中。输出轴104的一侧与第二齿轮102配合,另一侧则与轴承105配合,从而实现自由转动。第二齿轮102通过输出轴104与旋转编码器200建立传动关系,从而旋转编码器200的输入轴201可以接收到输出轴104的转速ω
o
的输入。
[0095]
旋转编码器200的脉冲量是固定的,在输入轴201转动时,旋转编码器200输出脉冲,plc或计数器收到脉冲,根据输入轴201接收到的转速ω
o
的不同,在单位时间内收到的脉冲总量则相应不同,则会反映出输入轴201转速的不同。根据脉冲量与实际转速的长度关系,可以获知输入轴201的真实转速,从而获知主轴m的真实转速ω
m
。
[0096]
在主轴转速监测系统1的固定方面,参见图2和图3,安装座组件300包括安装板301和底座302。如图2所示,安装板301上开设有通孔303,旋转编码器200的输入轴201可以延伸穿过通孔303。轴承壳体106可以通过法兰盘107和紧固件108固定至安装板301上。
[0097]
如图3可见,安装板301上开设有第一组腰孔304。参见图2或图3,安装座组件300可以进一步包括底座302。底座302包括图3中可见的第二组腰孔306。仍参见图2或图3,底座302一方面通过第一组紧固件305与安装板301固定,另一方面通过图3中可见的第二组紧固件307而固定到自动扶梯的横梁c上。此外,通过第一组腰孔304和第一组紧固件305之间的协作,安装座组件300还可以适应不同的主轴m与横梁c之间的间距s。类似地,通过第二组腰孔306和第二组紧固件307之间的协作,安装座组件300也可以适应不同的轴向安装距离d
a
。根据第一实施例,第一组紧固件305的数量可以是四个,第二组紧固件307的数量也可以是四个。当然,本领域技术人员也可以基于本实用新型的构思,对安装座组件300的结构及安装方式进行适当变型。
[0098]
为了对主轴转速监测系统1进行保护,尤其为了对齿轮传动组件100进行保护,主轴转速监测系统1还可以包括保护罩组件400,齿轮传动组件100等部件可以通过覆盖有保护罩组件400而加以保护。在第一实施例中,保护罩组件400可以包括保护罩401和底座板402。参见图3,保护罩401进一步包括弧形段403和直线段404。
[0099]
图4更清楚示出了保护罩401的弧形段403及其设置方式。如图4所示,保护罩401的弧形段403在第一齿轮101和主轴m的上方延伸,从而保护齿轮传动组件100免受灰尘等污染,也同时对精密测量部件进行了有效防护。
[0100]
返回参见图3,保护罩401的直线段404上开设有第三组腰孔405。在第一实施例中,第三组腰孔405的数量可以是两个。保护罩组件400进一步包括底座板402。
[0101]
例如可由图4所示,底座板402上开设有第四组腰孔407。在第一实施例中,第四组腰孔407的数量也可以是两个。仍参见图3和图4,底座板402一方面通过第三组紧固件406与保护罩组件400的直线段404固定,另一方面通过图4中可见的第四组紧固件408而固定到自动扶梯的横梁c上。
[0102]
此外,通过第三组腰孔405和第三组紧固件406之间的协作,保护罩组件400还可以适应不同的主轴m与横梁c之间的间距s。类似地,通过第四组腰孔406和第四组紧固件408之间的协作,保护罩组件400也可以适应不同的径向安装距离d
r
。根据第一实施例,第三组紧固件406的数量可以是两个,第四组紧固件408的数量也可以是两个。当然,本领域技术人员
也可以基于本实用新型的构思,对保护罩组件400的结构及安装方式进行适当变型。
[0103]
参见图4,可选地,底座板402还可以包括加强肋409,以提升保护罩组件400及主轴转速监测系统1的整体稳定性。
[0104]
实施例2
[0105]
图5示出了根据本实用新型第二实施例的用于自动扶梯的主轴转速监测系统1的示意图。由图5可见,在第二实施例中,齿轮传动组件100及旋转编码器200采用双侧对称固定。
[0106]
图6是第二实施例的主轴转速监测系统1的放大细节图。
[0107]
在第二实施例中,如图6所示,齿轮传动组件100同样包括第一齿轮101和与之啮合的第二齿轮102。与第一实施例不同的是,齿轮传动组件100安装到待测速的主轴m的中间部分,且如前所述,采取基本对称的双侧固定方式。
[0108]
更具体而言,参见图6,第一齿轮101固定连接到主轴m的中部,以随着主轴m一起转动,从而可以传递主轴m的转速ω
m
。第二齿轮102与第一齿轮101啮合传动,从而将主轴的转速ω
m
经由第一齿轮101而传递给与之啮合的第二齿轮102。在第二实施例中,第一齿轮101的分度圆直径d1同样大于第二齿轮102的分度圆直径d2。从而,主轴的转速ω
m
通过第一齿轮101到第二齿轮102的传递得到了放大。
[0109]
在第二实施例中,齿轮传动组件100同样包括与第二齿轮102对应的输出轴104。与第一实施例不同的是,主轴转速监测系统1还包括对称设置的轴承组件500。参见图7所示,轴承组件500包括分设于齿轮传动组件100两侧的第一轴承座501和第二轴承座502。
[0110]
图8是根据第二实施例的主轴转速监测系统的剖面示意图,其中示出了轴承组件500的细节。由图8所示,第一轴承座501和第二轴承座502中分别安装有第一轴承503和第二轴承504。参见图8的剖面图可见,主轴m则套设于第一轴承503和第二轴承504的轴承孔中。
[0111]
仍参见剖面图的图8,第一轴承座501和第二轴承座502中还分别安装有第三轴承505和第四轴承506。如图8可见,第二齿轮102的输出轴104则套设于第三轴承505和第四轴承506的轴承孔中,从而实现自由转动。在第二实施例中,第二齿轮102同样通过输出轴104与旋转编码器200建立传动关系,从而旋转编码器200的输入轴201可以接收到输出轴104的转速ω
o
的输入,进而可以获知主轴m的真实转速ω
m
,在此不再赘述。
[0112]
在主轴转速监测系统1的固定方面,参见图7或图8,安装座组件300包括安装板301和底座302。同样地,在第二实施例中,安装板301和底座302也是两侧对称设置的。具体参见图7,安装板301可以通过紧固件分别安装到轴承组件500的两侧。更具体地,安装板301可以通过紧固件分别安装到第一轴承座501和第二轴承座502的两侧。紧固件的具体设置方式可以与第一实施例相同,也可以与第一实施例不同,在此不再赘述。当然,本领域技术人员也可以基于本实用新型的构思,在紧固件的设置及安装方式上进行适当变型。
[0113]
仍参见图7或图8,安装板301与底座302相连接,连接方式可以如图8所示。当然,本领域技术人员也可以基于本实用新型的构思,在连接方式上进行适当变型。进一步,底座302则通过对称设置的第一安装脚f1和第二安装脚f2,安装到自动扶梯的横梁c上。当然,本领域技术人员也可以基于本实用新型的构思,在底座302的固定方式上进行适当变型。
[0114]
为了对主轴转速监测系统1进行保护,尤其为了对齿轮传动组件100进行保护,第二实施例的主轴转速监测系统1同样可以设置保护罩组件400。齿轮传动组件100等部件可
以通过覆盖有保护罩组件400而加以保护。在第二实施例中,保护罩组件400的结构及安装方式,可以与第一实施例相同,也可以与第一实施例不同,在此不再赘述。当然,本领域技术人员也可以基于本实用新型的构思,在保护罩组件的结构及安装方式上进行适当变型。例如,保护罩组件400也可以安装到底座302上,而不是横梁c上。
[0115]
第二实施例的主轴转速监测系统1采用双侧固定方式,能够实现更平稳的传动及更好的系统稳定性,同时也可以保证更好的运动同步性,最终可以直接、稳定、可靠、准确地获取主轴m的转速ω
m
。
[0116]
最后,需要说明的是,本实用新型在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
[0117]
以上所述仅是本实用新型的示范性实施方式,而非用于限制本实用新型的保护范围,本实用新型的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1